Ubuntu安装ROS(kinetic版,其它版本同样适用)
- 1、Ubuntu设置
- 2、添加ROS源,并设置密钥。
- 3、更新源列表,安装ROS的桌面版。
- 4、ROS初始化
- 5、设置环境变量
- 6、安装rosinstall
- 7、ROS环境测试
1、Ubuntu设置

找到系统设置,打开“软件和更新”。
1) 前四项打勾。
2.)选择阿里云。
2、添加ROS源,并设置密钥。
1)添加ros源
sudo sh -c 'echo "deb http://packages.ros.org/ros/ubuntu $(lsb_release -sc) main" > /etc/apt/sources.list.d/ros-latest.list'
2)添加密钥
sudo apt-key adv --keyserver 'hkp://keyserver.ubuntu.com:80' --recv-key C1CF6E31E6BADE8868B172B4F42ED6FBAB17C654
3、更新源列表,安装ROS的桌面版。
1)更新源列表
sudo apt-get update
2)安装ROS桌面完整版
sudo apt-get install ros-kinetic-desktop-full
4、ROS初始化
sudo rosdep init
rosdep update
此处极容易出错,可参考“ROS rosdep update更新失败”,一般都可解决(亲测可用)。
5、设置环境变量
定位ROS位置,使能环境变量。
echo "source /opt/ros/kinetic/setup.bash" >> ~/.bashrc
source ~/.bashrc
6、安装rosinstall
rosinstall可以方便的安装ros的工具包,大部分通用ros包也可通过sudo apt-get install 安装。
sudo apt install python-rosdep python-rosinstall python-rosinstall-generator python-wstool build-essential
7、ROS环境测试
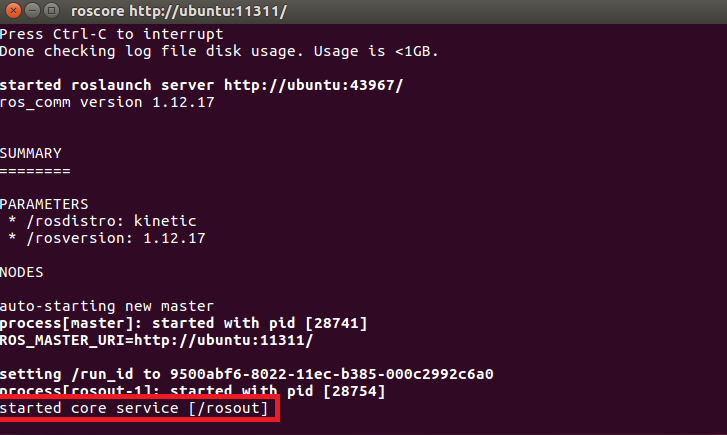
1)启动ROS环境,若此步出现roscore尚未安装,请重试第5。
roscore
若如下图所示,则启动成功。
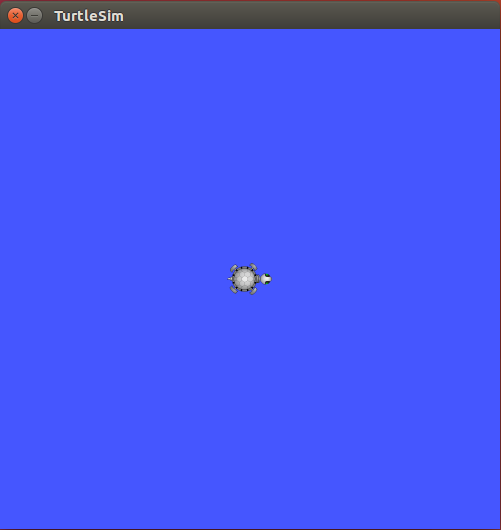
2)新开一个终端,运行以下指令,打开小乌龟界面。
rosrun turtlesim turtlesim_node
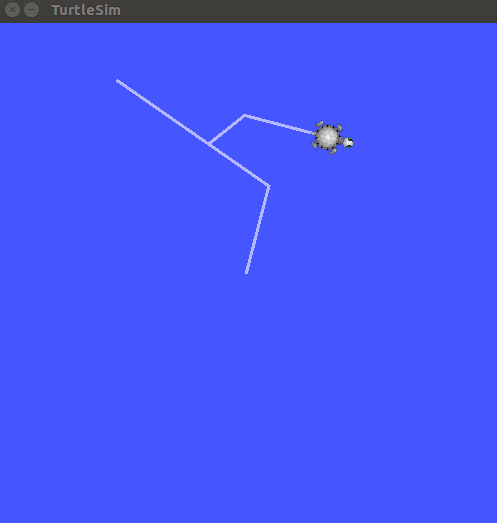
3)再开一个终端界面,运行以下指令,控制乌龟运动。
rosrun turtlesim turtle_teleop_key
需注意,鼠标只有在此控制终端中才能控制乌龟运动。
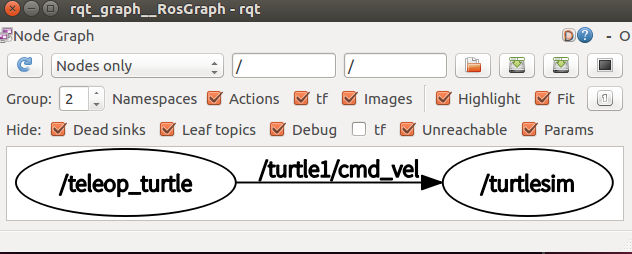
4)新开终端界面,运行以下指令,查看ROS节点关系。
rosrun rqt_graph rqt_graph
最后
以上就是听话红酒最近收集整理的关于Ubuntu16.04安装kinetic版ROS的全部内容,更多相关Ubuntu16内容请搜索靠谱客的其他文章。
本图文内容来源于网友提供,作为学习参考使用,或来自网络收集整理,版权属于原作者所有。








发表评论 取消回复