文章目录
- 一、图像特征-harris角点检测
- 1.基本原理
- 2.代码实现
- 二、图像特征-sift
- 1.引言
- 2.高斯模糊
- 多分辨率金字塔
- 高斯差分金字塔(DOG)
- DOG空间极值检测
- 关键点的精确定位
- 消除边界响应
- 特征点的主方向
- 3.生成特征描述
- 总结
一、图像特征-harris角点检测
首先引入什么是角点?
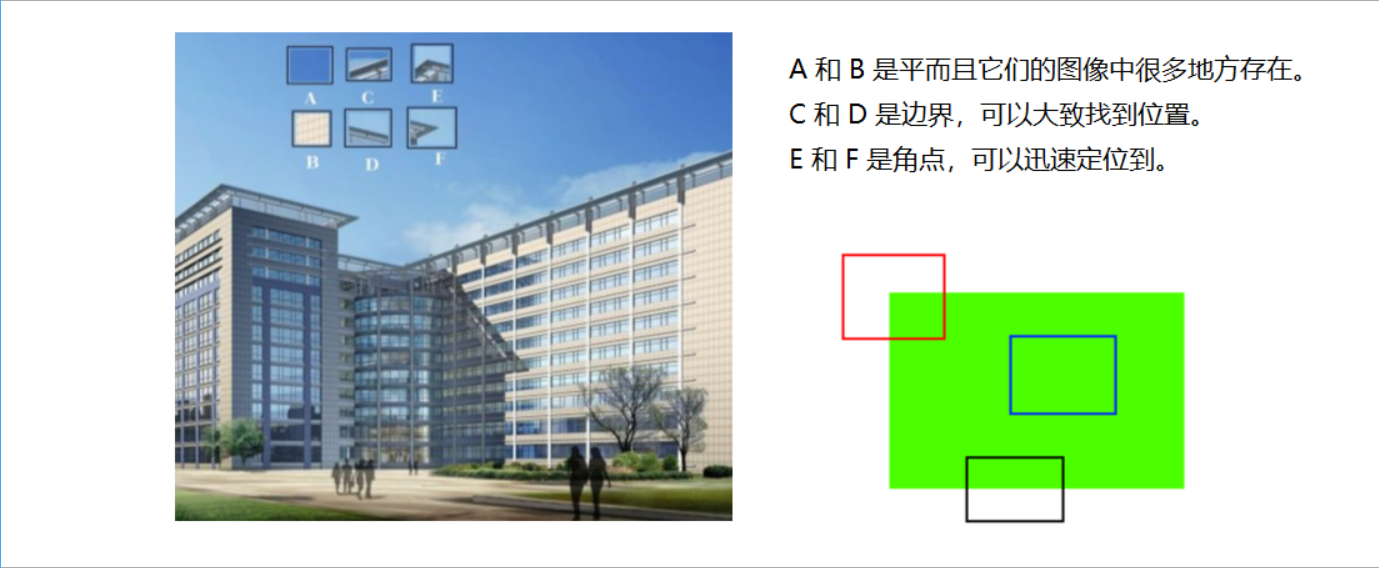
图中的红框部分便是角点。
1.基本原理
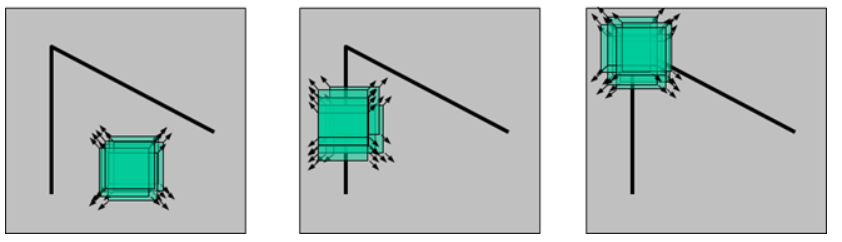
首先从定义我们可以简单地理解为角点就是俩个不同事物的交点处,那么我们怎么去求一个图像中的角点呢?还是要对每个像素点进行计算。
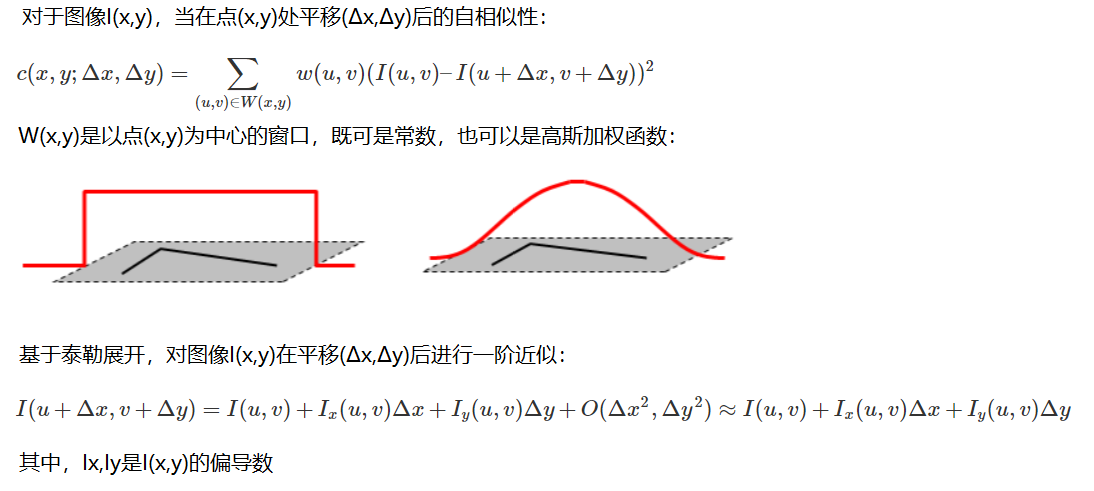
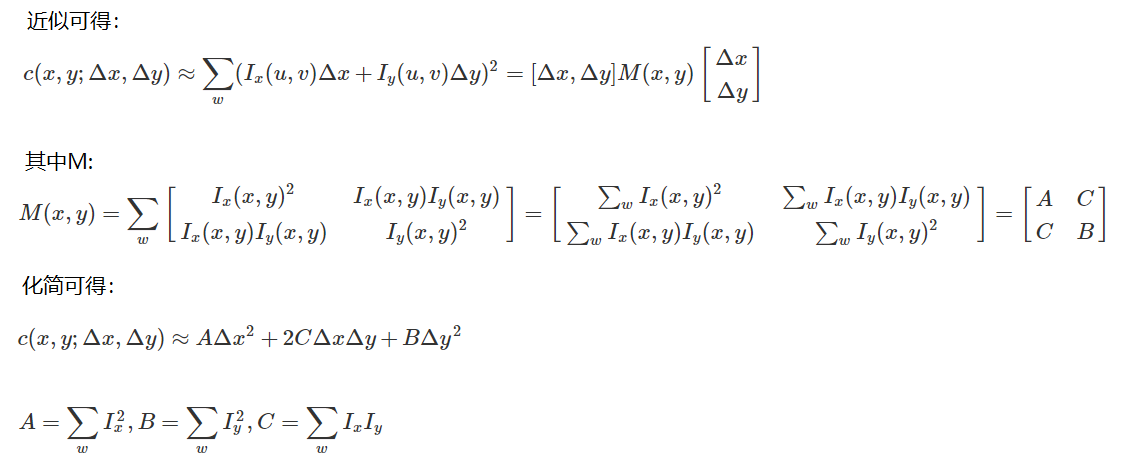
计算公式的原理主要是利用了微积分和线性代数的知识,我们只需要明白原理就可以,看懂就可以,不用自己去计算,自己计算要计算机干什么。
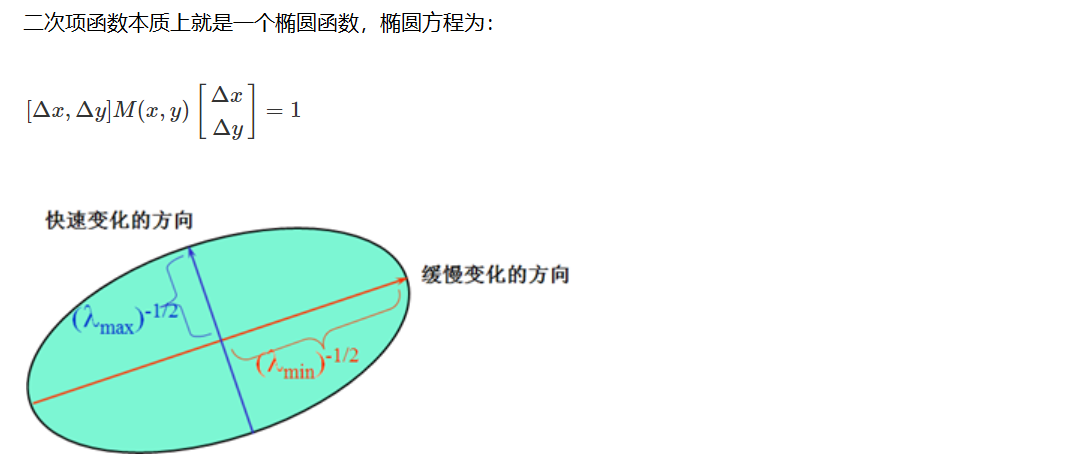
这里对上面的式子进一步解释,这里有点梯度下降的感觉。
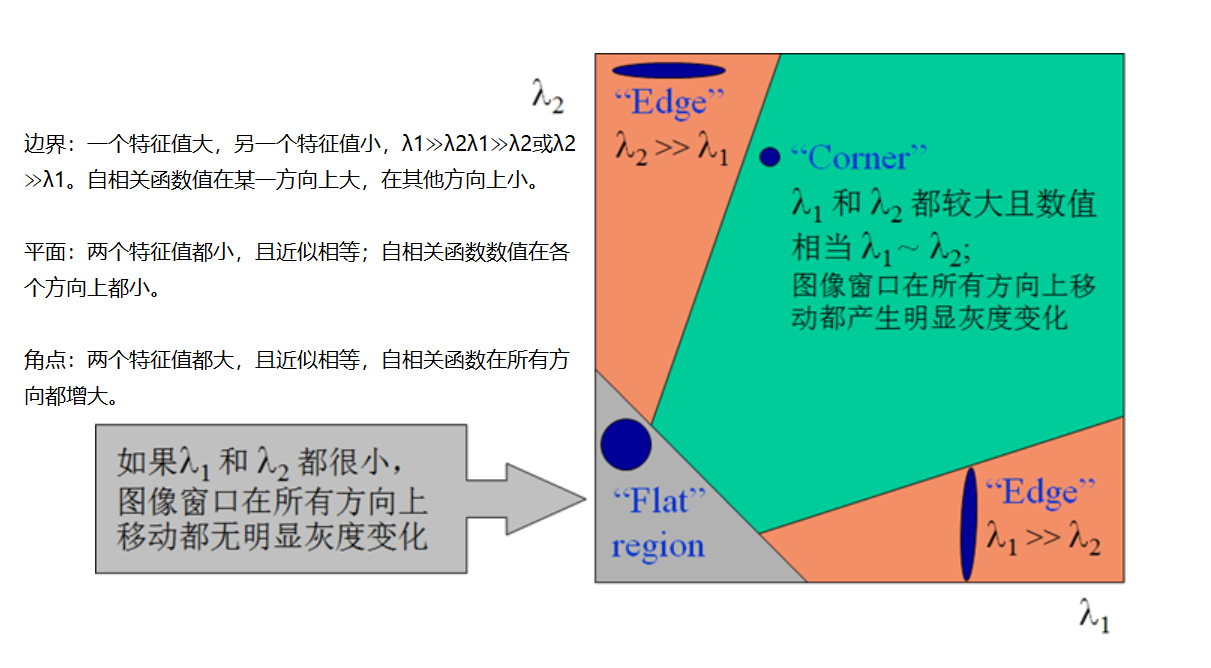
这里对可能得到的结果进行解释,根据数据值的不同可分为边界、平面和角点,我们要的是角点,这对我们后期进行数据筛选提供了基础。自相关函数就是最开始的表达式。

2.代码实现
cv2.cornerHarris()
这里是括号中的四个参数。
- img: 数据类型为 float32 的入图像
- blockSize: 角点检测中指定区域的大小
- ksize: Sobel求导中使用的窗口大小
- k: 取值参数为 [0,04,0.06]
import cv2
import numpy as np
img = cv2.imread('test_1.jpg')
gray = cv2.cvtColor(img, cv2.COLOR_BGR2GRAY)
# gray = np.float32(gray) 对不是指定格式的图像进行转换
dst = cv2.cornerHarris(gray, 2, 3, 0.04)
img[dst>0.01*dst.max()]=[0,0,255] #筛选出满足角点条件的像素点,用红色表示
cv2.imshow('dst',img)
cv2.waitKey(0)
cv2.destroyAllWindows()

可以看到一些标红的点就是我们需要的角点。
二、图像特征-sift
1.引言
首先这里先引入一个概念叫做图像尺度空间,怎么来理解这个概念呢?我们这样引入:
在一定的范围内,无论物体是大还是小,人眼都可以分辨出来,然而计算机要有相同的能力却很难,所以要让机器能够对物体在不同尺度下有一个统一的认知,就需要考虑图像在不同的尺度下都存在的特点。
这个特点就是尺度空间。
2.高斯模糊
如何去求得这样一个尺度空间,需要用到高斯模糊的定义。
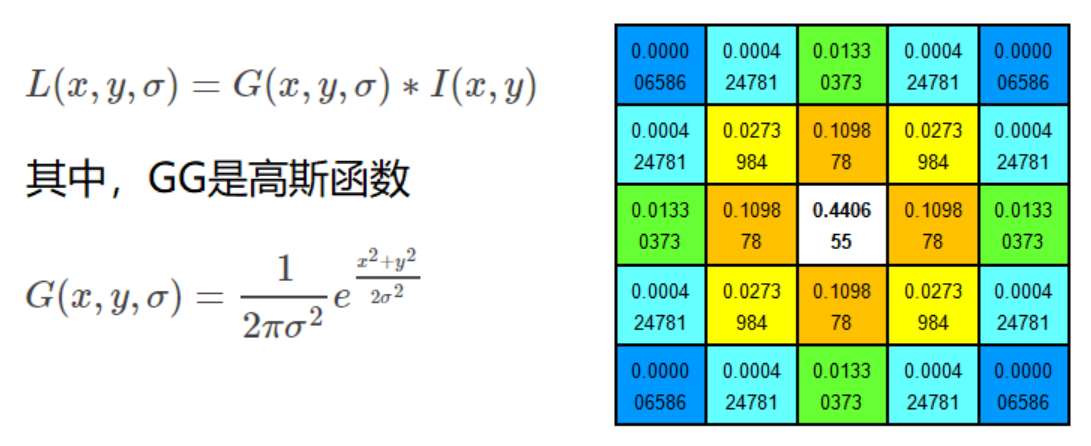

I(x,y)是图片每个像素点的坐标。
多分辨率金字塔
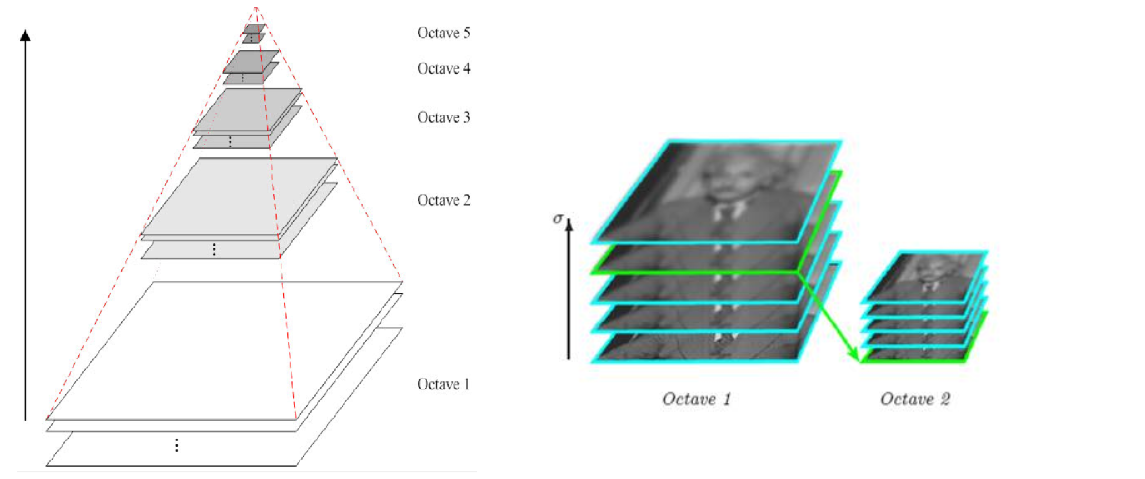
这里对图像进行金字塔的处理,从下往上取越来越小的卷积矩阵。
不同σ的高斯函数决定了对图像的平滑程度,**越大的σ值对应的图像越模糊
**
高斯差分金字塔(DOG)
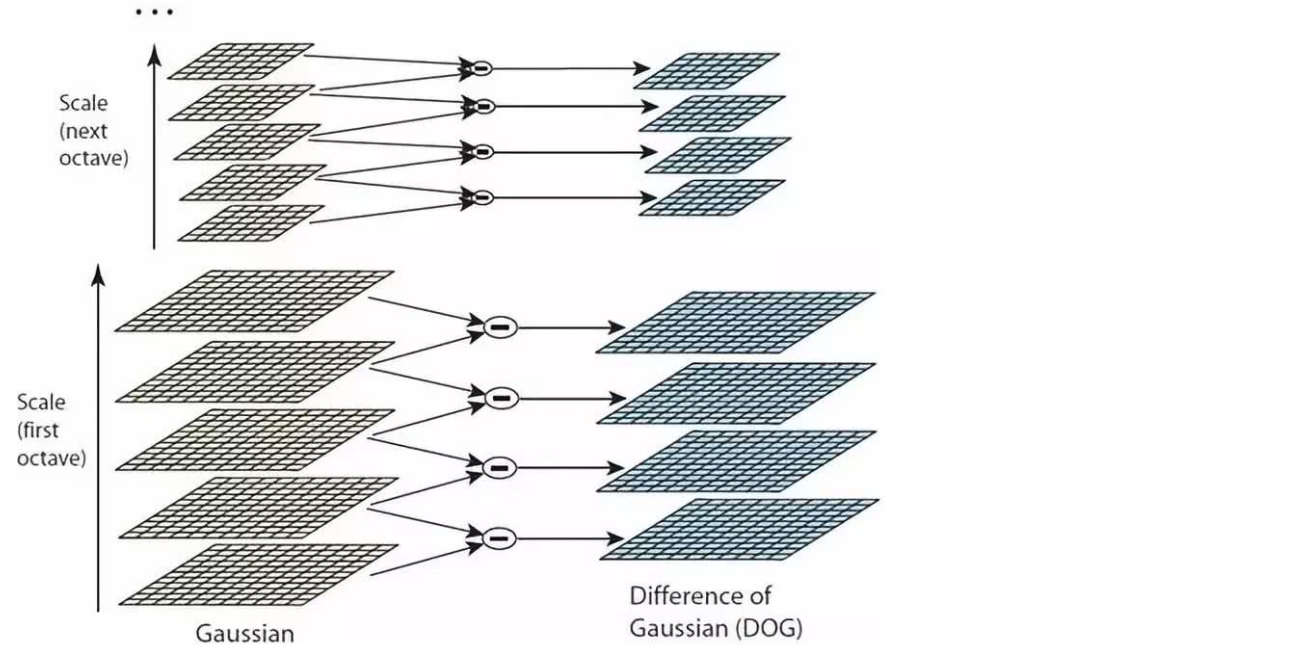
什么是差分金字塔,就是对在进行上述多分辨率金字塔的处理结果的基础上,对每一层进行差分处理。
可以这么去理解,我们去区分俩个不同的事物,区分点一定是这俩个事物最不同的地方,也就是说我们区别A与B,A身高180,B身高179,180-179=1,看不出什么,但是A体重200,B体重120,二者差值非常明显,所以选择体重来作为区别点。
这个金字塔对每一层得到的5个图像,逐个进行差分。

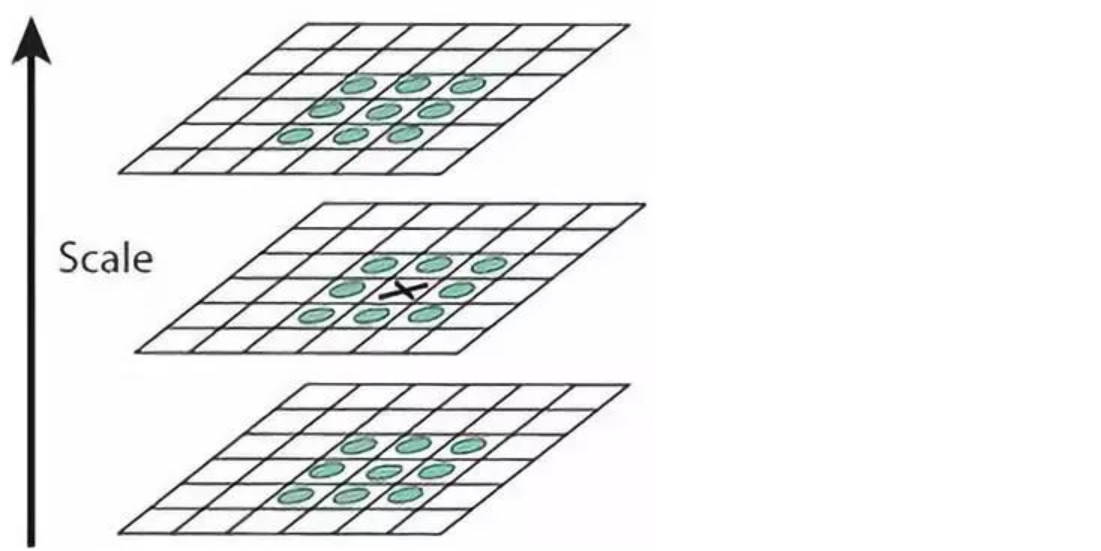
DOG空间极值检测
为了寻找尺度空间的极值点,每个像素点要和其图像域(同一尺度空间)和尺度域(相邻的尺度空间)的所有相邻点进行比较,当其大于(或者小于)所有相邻点时,该点就是极值点。如下图所示,中间的检测点要和其所在图像的3×3邻域8个像素点,以及其相邻的上下两层的3×3领域18个像素点,共26个像素点进行比较
关键点的精确定位
这些候选关键点是DOG空间的局部极值点,而且这些极值点均为离散的点,精确定位极值点的一种方法是,对尺度空间DOG函数进行曲线拟合,计算其极值点,从而实现关键点的精确定位。
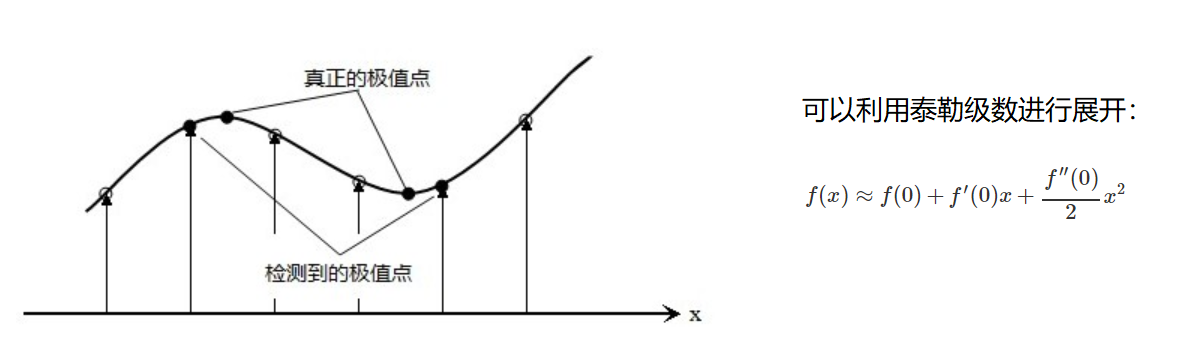
这里又有一种梯度下降的感觉。
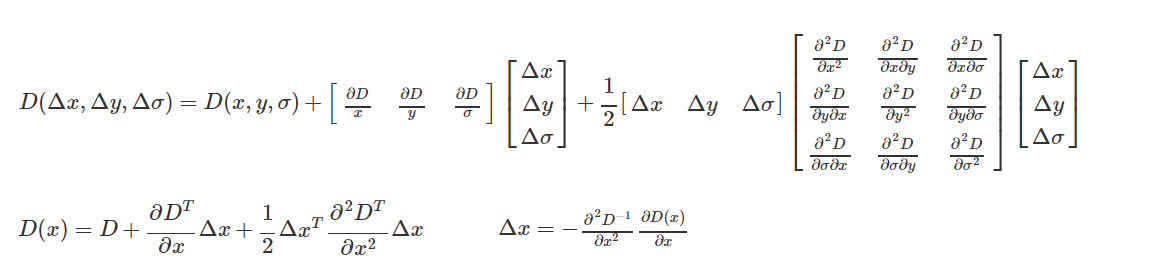
可见泰勒公式的重要性,需要重新学习下高等数学了。
消除边界响应
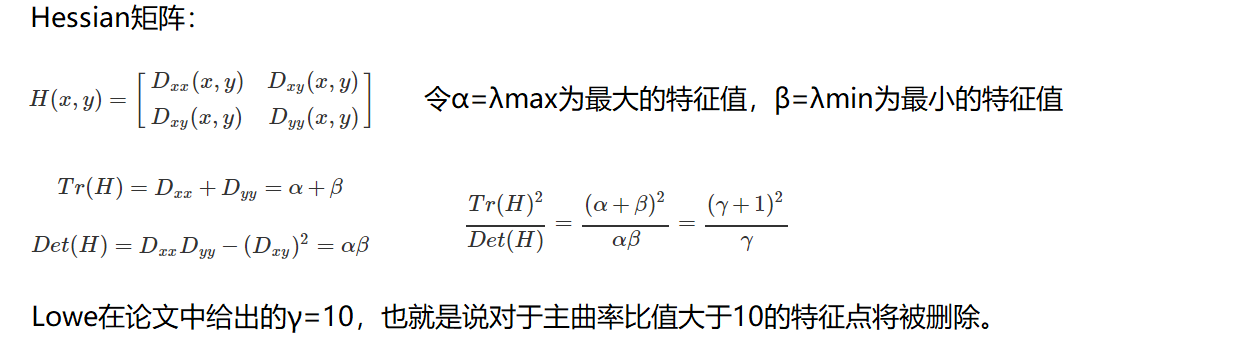
边界效应可以理解为边界上的点,它并不是我们需要的点,但是它是极大值。
特征点的主方向
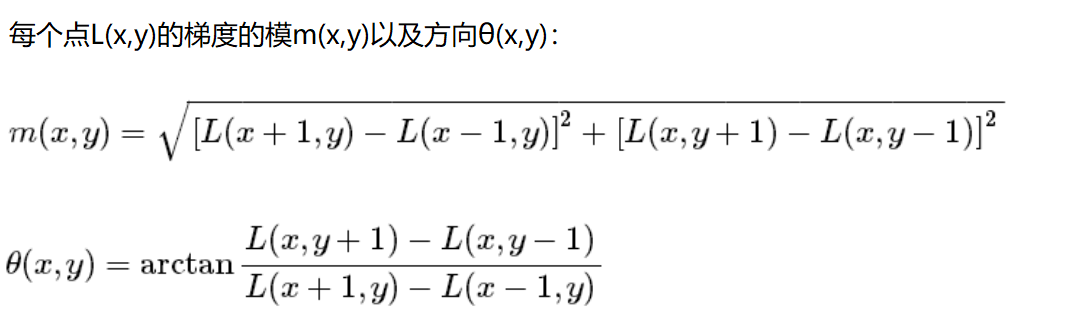
每个特征点可以得到三个信息(x,y,σ,θ),即位置、尺度和方向。具有多个方向的关键点可以被复制成多份,然后将方向值分别赋给复制后的特征点,一个特征点就产生了多个坐标、尺度相等,但是方向不同的特征点。
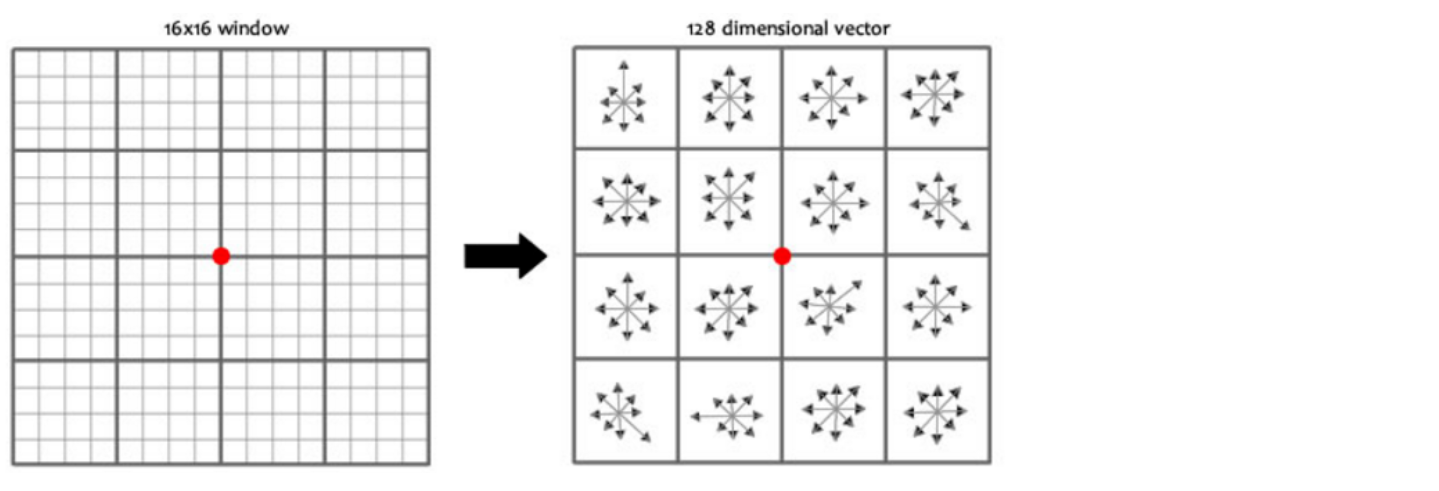
3.生成特征描述
详情可以参看论文:Scale Invariant Feature Transform(SIFT)
在完成关键点的梯度计算后,使用直方图统计邻域内像素的梯度和方向。

为了保证特征矢量的旋转不变性,要以特征点为中心,在附近邻域内将坐标轴旋转θ角度,即将坐标轴旋转为特征点的主方向。
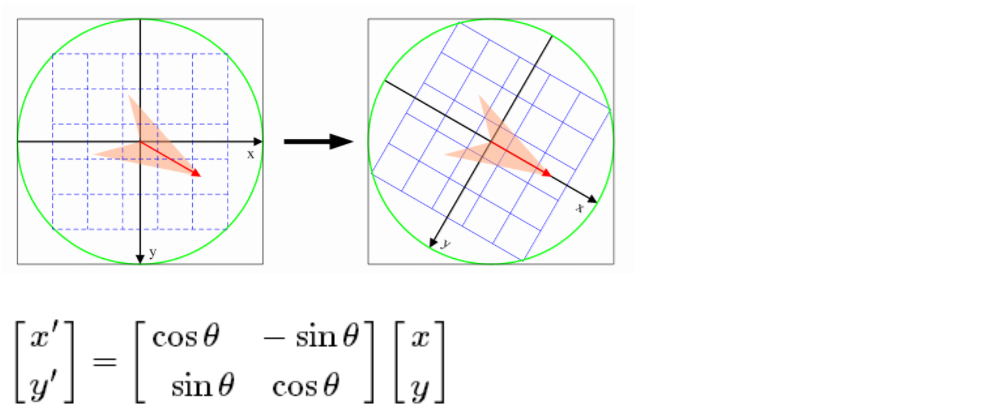
这里有点不理解。
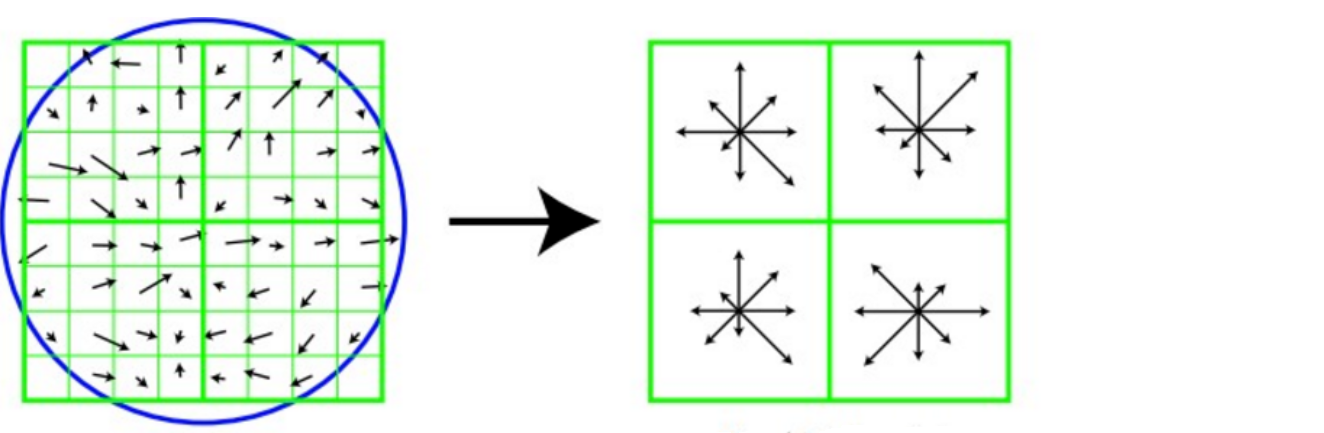
旋转之后的主方向为中心取8x8的窗口,求每个像素的梯度幅值和方向,箭头方向代表梯度方向,长度代表梯度幅值,然后利用高斯窗口对其进行加权运算,最后在每个4x4的小块上绘制8个方向的梯度直方图,计算每个梯度方向的累加值,即可形成一个种子点,即每个特征的由4个种子点组成,每个种子点有8个方向的向量信息
总结
上述所讲其实都包含在了一个图像算法中——SIFT
import cv2
import numpy as np
img = cv2.imread('test_1.jpg')
gray = cv2.cvtColor(img, cv2.COLOR_BGR2GRAY)
#得到特征点
sift = cv2.xfeatures2d.SIFT_create()
kp = sift.detect(gray, None)
img = cv2.drawKeypoints(gray, kp, img)
cv2.imshow('drawKeypoints', img)
cv2.waitKey(0)
cv2.destroyAllWindows()
kp, des = sift.compute(gray, kp)
des[0]

最后
以上就是醉熏吐司最近收集整理的关于opencv-图像处理一、图像特征-harris角点检测二、图像特征-sift总结的全部内容,更多相关opencv-图像处理一、图像特征-harris角点检测二、图像特征-sift总结内容请搜索靠谱客的其他文章。








发表评论 取消回复