今天小编为大家分享MAYA打造逼真的机器人瓦利全过程,教程真的很不错,很值得大家学习,而且作者介绍的也很详细,推荐到靠谱客,大家快快来学习吧!
大家好,这是我第一次发教程,先自我介绍一下,大家可以叫我DK,至少业内的朋友都这么叫!英文全面叫Duckula,但连老外都觉得叫全名很别扭,所以就直接称呼我DK了!
网上关于WALL-E的教程非常的多,但很多只是建立在模型的基础上去建模,我希望在这里和大家分享的不仅仅是建模的方式和方法,更是我以及我们团队的建模思路,希望得到大家的认可,思路是第一位呀!
瓦力、伊娃,两个本不属于同一个世界的机器人,相遇后注定了他们不平凡的经历。悄悄在她熟睡的时候为她堆砌起一个"垃圾"人;默默在她昏迷不醒的时候守护在她的身旁,为她遮蔽风雨,纵使电闪雷鸣也不在意;当她离开地球的一刹那,纵使浑身碎骨也是义无反顾……
奥斯卡最佳动画片《WALL_E》为你诠释梦幻般的世界,初次看到这个机器人就被震撼了,自己暗下决心要完成这项目前看来比较艰巨的任务——建模。于是开始在Google,Baidu疯狂搜刮关于这个小可爱的所有资料。(见下图)

看遍素材发现一些结构不是很理解,建模不能这么盲目进行,何况是这么可爱的小家伙,不能毁在自己手上,所以我决定先把每个运动结构搞搞清楚在下手,下图是我简单勾勒的建模大纲

好啦,大纲就这样,建议建模之前养成好习惯,分析模型结构,最好自己手绘一些线稿,强化记忆理解,胸有成竹后开工,建立工程目录,规范命名(物体名、组名、层名等),打开显示面法线正反命令,以便我们在制作过程中及时发现面的法线是否正确。
我把瓦力分成5大部分来建,这样方便集中精力针对每个部分操作:
1、 眼睛部分:
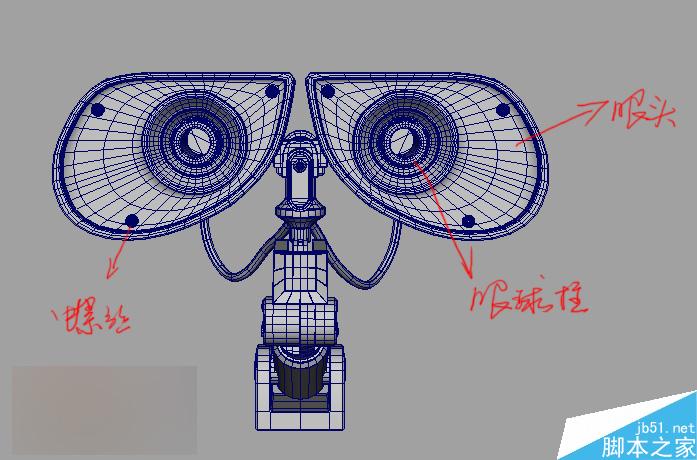
这里需要注意的很多,眼睛前半部分和后半部分是分开的,我看过一些同学做的模型,大多是挤在一起,如果做低面数游戏模型是可以这么处理的,因为之后我还想瓦力能做动画,所有一些细小的部分必须区分开来建模,电影中的眼睛是有镜面效果的,而且里面的眼球是有伸缩的,那么应该想到眼球和眼头是分开的,镜面效果可以用一个面片来做,之后用透明材质和灯光可以达到所要的效果,在眼头的上方有两片十分机灵的可以翘上翘下的部件,我们暂且称为瓦力的眉毛好啦,不要忘记做它哦;眼背部分的结构相对前者要复杂一些,只要理解了它们的用途就可方便建模了

从上图可以看出,眼睛的结构对于全身是个不小的难题,我的顺序是先把眼头部分做好,以便之后的工作有个参照物,其次是眉毛以及眼球柱,然后是托盘、高级配电箱、伸缩总成、防护板、伸缩架,最后做电线部分。

这是做好后眼部smooth之后的效果。要注意的是,机械模型类不一定都要smooth,有些比较锐利的器具可以不用smooth,在边缘处bevel使其形成一个切面便可,在属性编辑器里设置bevel为2边。

最后两个眼睛中间有一个发射器,影片中瓦力划开冰箱发现绿苗的镜头还记得吧,对,就是它

这里的构造简单无奇,你就大胆的用圆柱体和立方体挤出吧,注意比例以及和整个眼睛的搭配。
眼睛部分我们就做到这里,具体怎么做其实不难,大多是用圆、方、柱来挤出,镂空的部分可以先不考虑,做好大型后删除要镂空的面积可。注意:如果你想在一个物体上挖个洞,最好的办法是用 split polygon tool工具画出这个洞或者三角的形状,然后删除面调整点、边。不赞同用booleans布尔运算将两个物体相减,至于为什么,呵呵,你自己去试试喽···
1、 脖子部分:
脖子这里请参照以上图片,做动画时脖子会有大量的运动,关节和形状要准确。

1、 手臂部分:
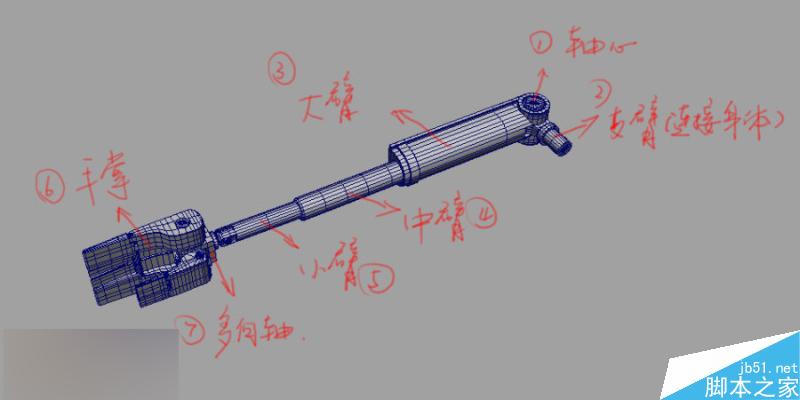
上图中已经表示出7个主要部件,以手掌为参照物向后建模,手掌的形状你可以去看电影,7分53秒和1小时28分41秒有手部特写,非常清楚。



4、 身体部分:
想要做好这个部分,要下功夫了,因为平常我们建的大多都是没有厚度的模型,这个部分内外结构不同,而且要做出厚度才能"张开大嘴"给人看,用盒子起步,然后不要马上就做出厚度,(前车之鉴,害自己删线删面1个多小时```)外形做好后再做内侧,从内侧挤出面之后合并。顶面部分的凸凹结构可以自己发挥,我是没找到清晰的参考图,只要做出大体样子就可以了。太阳能板的旋转方向要搞清楚,旋转轴要做出来,一共六块。另外录放机和一些按钮自己看着做,不多讲,看图吧!
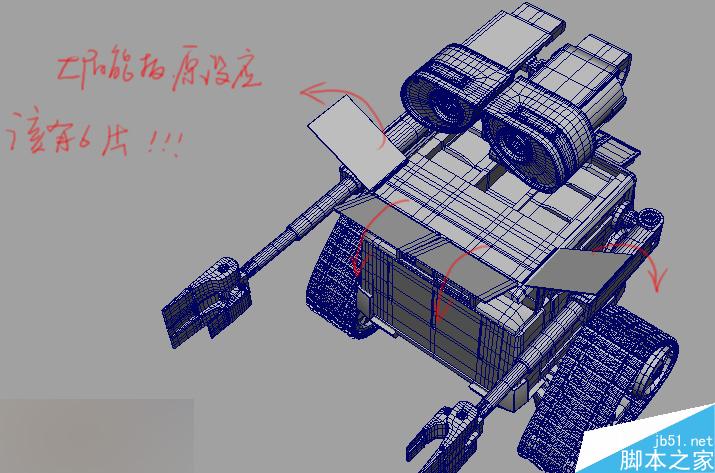

做手臂运动轨道的时候最好不要马上就做,待其他结构完成后在向内挤压,如果在没有厚度的时候就已经挤压好轨道形状了,那么在做厚度的时候比较麻烦

5、 履带驱动部分:
不要为上面建的模型沾沾自喜啦,可以想象没有"腿"的瓦力是多么让人无法接受的,正因为有了它,瓦力才能不远万万里的追上心爱的伊娃,我们要为瓦力添加一双够劲够动感的驱动总成。now ```go

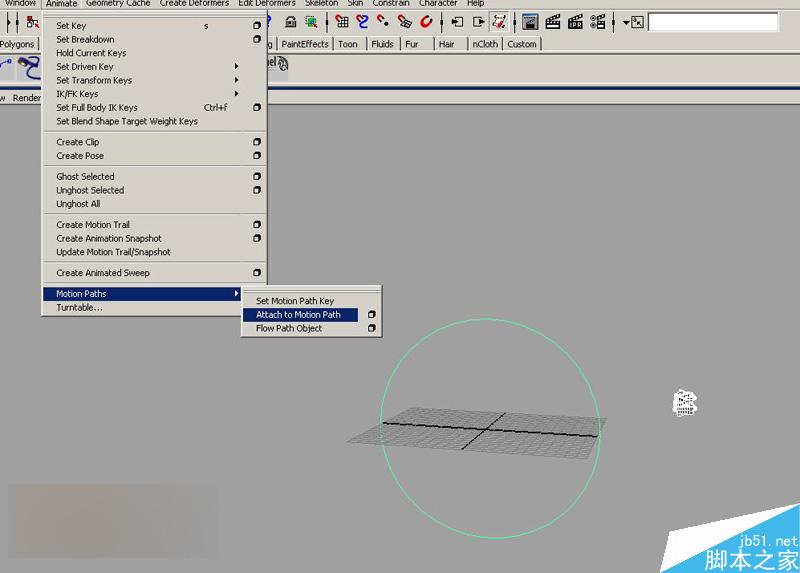
已有履带一块,我们希望让它形成我们想要的履带形状,同时还要考虑今后动画时的转动问题。我们需要用的制作工具就是路径动画工具motion path,操作方法如下:
(一) 新建一根圆线,作为路径动画的轨道,选中履带板模型,加选线,执行路径动画命令attach to mtion path
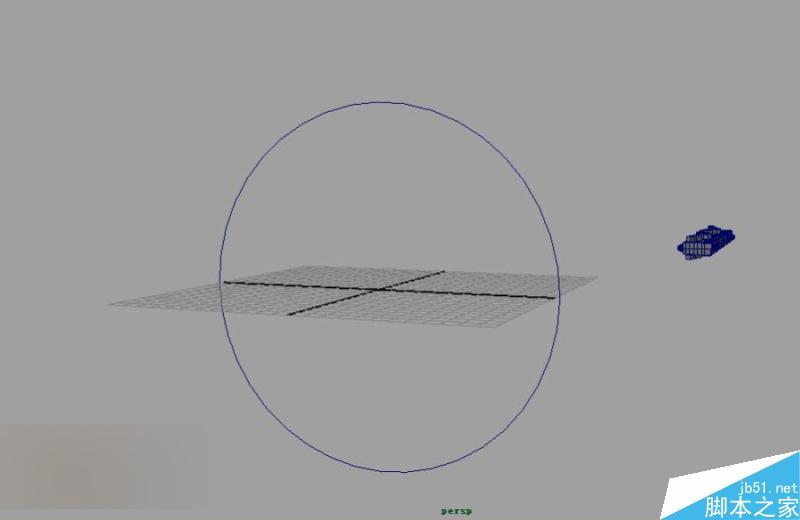

(二) 可以看到,执行了路径动画命令后,履带板的朝向并不如预期的那样正确,选中履带板模型,ctal+a打开属性编辑器,找到mtion path命令,把world up type改为normal ,把front axis改成z轴,履带板的朝向就正确了。


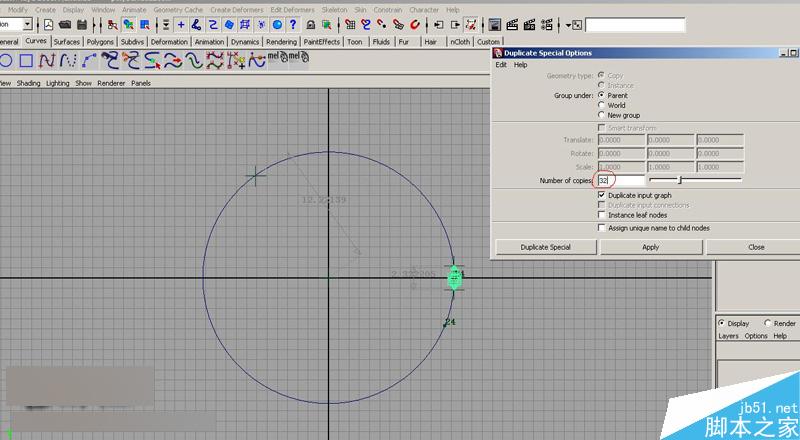
(三)接下来的步骤会花去不短的时间,首先,把已做好履带动画的模型板复制一定数量出来,让其规则的充满整个轨迹线,但复制的数量是需要计算的,也就是说,做这个履带动画到底需要多少块履带板,这是由轨迹线的长度和履带板的宽带来决定的,所以先用仗带工具计算出一块履带板的宽度为2.33,轨迹线的周长可以用圆周长2πr的公式来计算,所以用已伏量出的圆半径12.22可以计算出轨迹圆周长为76.74,那我们可以得出略为精确的所需履带板的数量了,为76.74/2.33,需要33块履带板。

(四)接来,我们需要复制出32块履带板出来,因为已有一块履带板了,所以复制33-1块就够了。选择履带板模型,打开复制选项框,选择数量32,执行复制命令。

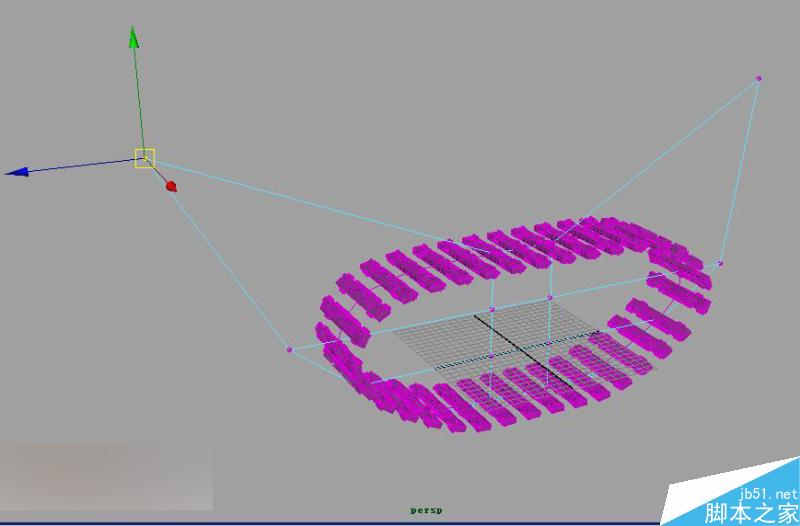
(六)然后ctrl+a打开某一根轨迹线的属性编辑器,找到mtion path节点,更改其U value值,把默认的0改成0.03,可以看到一块履带板已经从原来与初始履带板重合的位置开始偏移出来



(七)0.03这个值是由1/33而计算得来的,因为u value的总量是1,而33块履带块每一块的u value应该依次是为0;1/33;2(1/33) ;3(1/33) ;4(1/33)……….。所以接下来要做的是依次给每根轨迹线的u value改成0.03;0.06;0.09;0.12………依次类推。33块履带块就会规则的辅满轨迹线。
(八)如果还要做动画的话,框选33块轨迹线,给它们加一个晶格变形器,加高晶格变形器的分段线,并编辑晶格变形器的点使成塑选成你想要的履带轨道形状

履带已经完成,如果你只想做成瓦力履带的样子而不考虑要动画的话,那么之后的步骤可以省略。
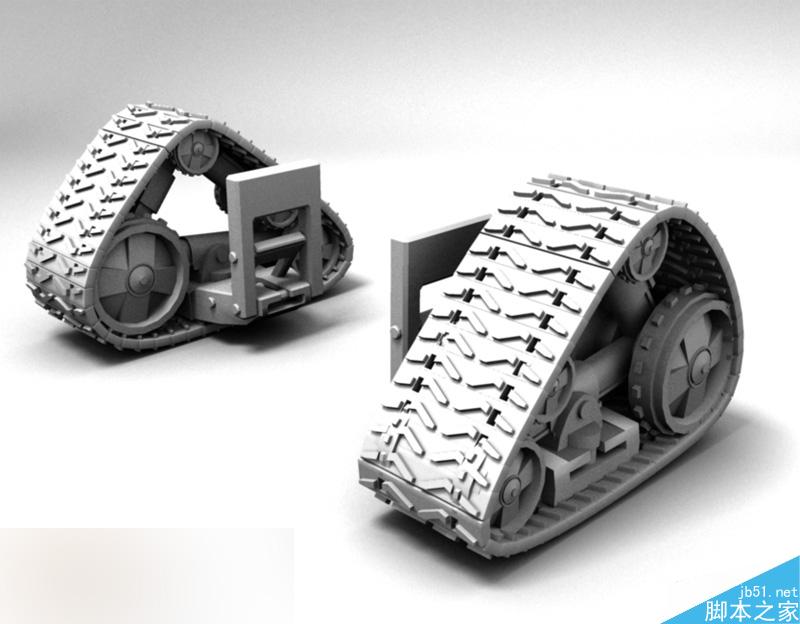
剩下的就是驱动轴部分,因为这里不难处理,所有没有截图,如果不知道如何驱动的,可以多看几遍电影。
(附上mr渲染图及线框)





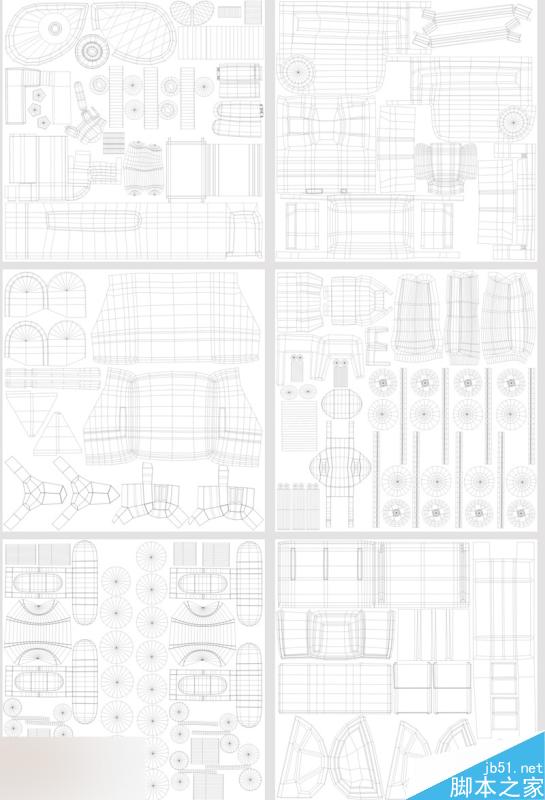
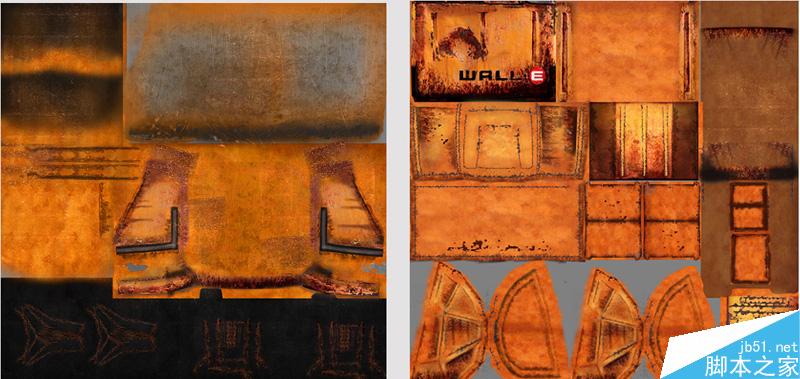
贴图进行中,最近公司项目很忙,没太多的时间自习画了,先画了部分,给大家先看看吧。


教程结束,以上就是MAYA打造逼真的机器人瓦利全过程解析,教程很不错,很值得大家学习,推荐过来,一起来学习吧!
最后
以上就是野性魔镜最近收集整理的关于MAYA打造逼真的机器人瓦利全过程解析的全部内容,更多相关MAYA打造逼真内容请搜索靠谱客的其他文章。








发表评论 取消回复