1 内容介绍
针对多传感器信息融合的基本可信度分配在实际应用中难以解决的问题,提出了一种基于D-S证据理论与BP网络相结合的多传感器信息融合的改进方法.该方法充分发挥BP神经网络自学习,自适应和容错的能力,利用BP神经网络处理证据理论的基本可信度问题,再利用D-S证据理论来处理不精确,模糊的信息.最后通过一个实例证明了该方法的有效性.
2 部分代码
%------------------齿轮箱故障诊断------------------%
%-------------------2015.12.09--------------------%
function [M2,M3,M4] = new(m1,m2,m3,m4,w)
%两个证据的信息融合
%--------------------------------------------
n2=2;
m_w=m1*w(1)+m2*w(2);%第一个加权证据s
m_e=(m1+m2)/n2;%平均证据
d1=sqrt(sum((m1-m_e).^2));
d2=sqrt(sum((m2-m_e).^2));
S2=ones(1,n2)-[d1 d2];
crd2=S2/sum(S2);%可信度
m=[m1;m2];
m_crd=crd2*m;%第二个加权证据
%k2=1-sum(m_w.*m_crd);
M2=(m_w.*m_crd)/sum(m_w.*m_crd);
%--------------------------------------------
%三个证据的信息融合
%--------------------------------------------
n3=3;
m_w=m1*w(1)+m2*w(2)+m3*w(3);%第一个加权证据
m_e=(m1+m2+m3)/n3;%平均证据
d1=sqrt(sum((m1-m_e).^2));
d2=sqrt(sum((m2-m_e).^2));
d3=sqrt(sum((m3-m_e).^2));
S3=ones(1,n3)-[d1 d2 d3];
crd3=S3/sum(S3);%可信度
m=[m1;m2;m3];
m_crd=crd3*m;%第二个加权证据
%k2=1-sum(m_w.*m_crd);
M3=(m_w.*m_crd)/sum(m_w.*m_crd);
%--------------------------------------------
%四个证据的信息融合
%--------------------------------------------
n4=4;
m_w=m1*w(1)+m2*w(2)+m3*w(3)+m4*w(4);%第一个加权证据
m_e=(m1+m2+m3+m4)/n4;%平均证据
d1=sqrt(sum((m1-m_e).^2));
d2=sqrt(sum((m2-m_e).^2));
d3=sqrt(sum((m3-m_e).^2));
d4=sqrt(sum((m4-m_e).^2));
S4=ones(1,n4)-[d1 d2 d3 d4];
crd4=S4/sum(S4);%可信度
m=[m1;m2;m3;m4];
m_crd=crd4*m;%第二个加权证据
%k2=1-sum(m_w.*m_crd);
M4=(m_w.*m_crd)/sum(m_w.*m_crd);
%--------------------------------------------
end
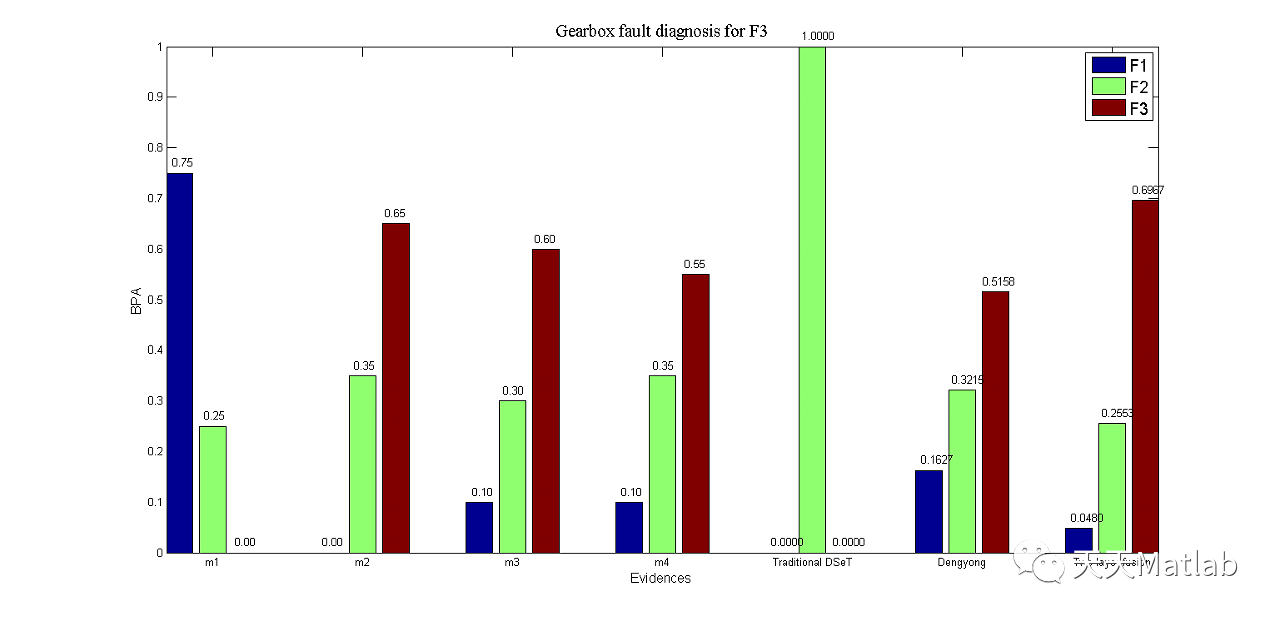
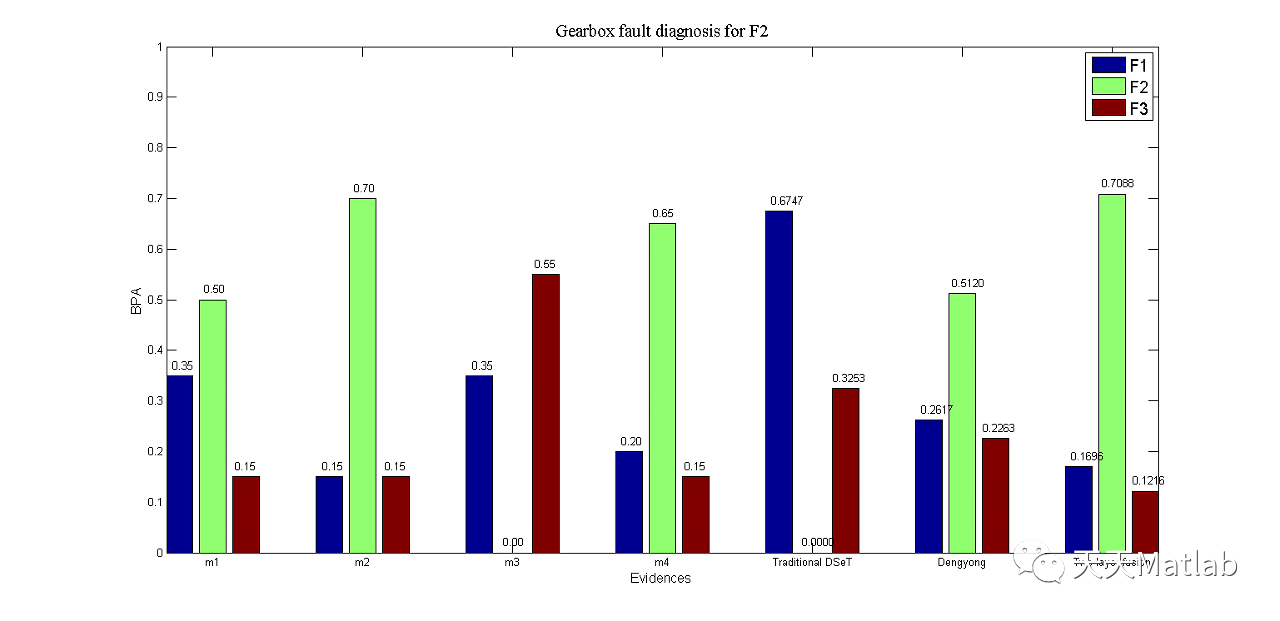
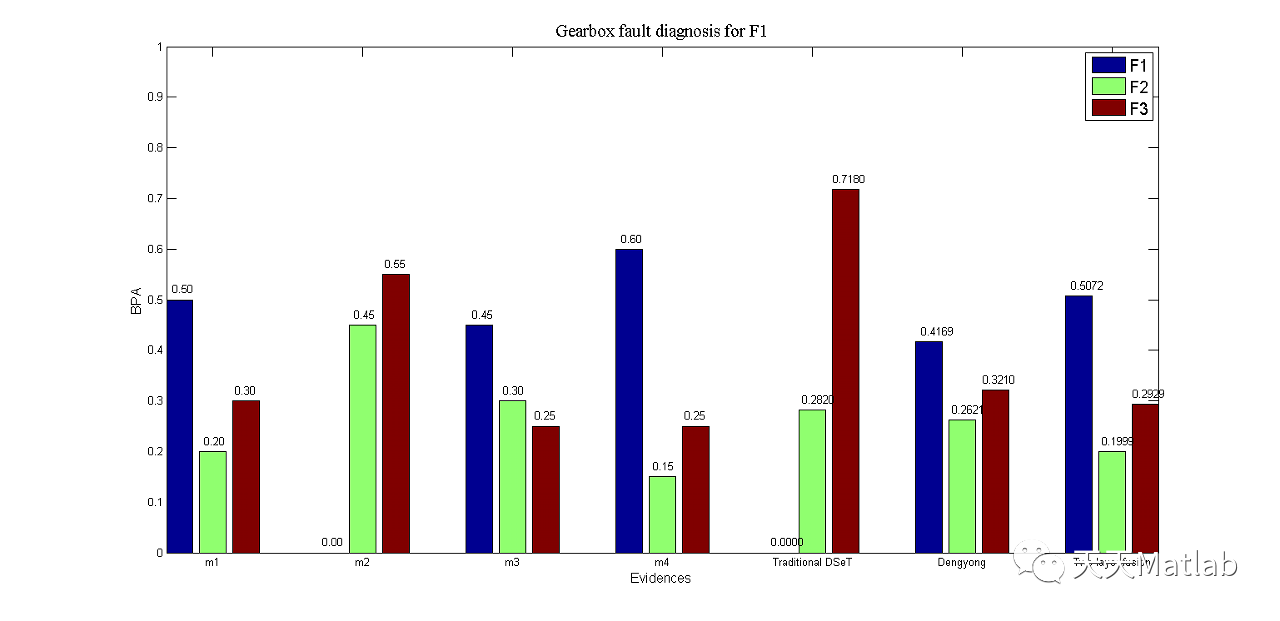
3 运行结果
4 参考文献
[1]付家才, 万遂. 基于D-S证据理论和BP神经网络的多传感器信息融合[J]. 自动化与仪器仪表, 2011(1):3.
博主简介:擅长智能优化算法、神经网络预测、信号处理、元胞自动机、图像处理、路径规划、无人机、雷达通信、无线传感器等多种领域的Matlab仿真,相关matlab代码问题可私信交流。
部分理论引用网络文献,若有侵权联系博主删除。
最后
以上就是魁梧秋天最近收集整理的关于【信息融合】基于BP神经网络和DS 证据理论实现不确定性信息融合问题附matlab代码的全部内容,更多相关【信息融合】基于BP神经网络和DS内容请搜索靠谱客的其他文章。








发表评论 取消回复