理论部分
概念
运动学正解,简而言之,就是给出6个关节变量,求得机械臂末端的位置和姿态
即给出
j
1
−
j
6
j_1 - j_6
j1−j6,求
x
,
y
,
z
,
r
x
,
r
y
,
r
z
x,y,z,rx,ry,rz
x,y,z,rx,ry,rz
DH参数
只单一地给出关节值或直角坐标值,是不能直接互相转化的,还与具体的机器人有关,这部分有关的内容可以用DH参数表来表示,其描述了机器人各关节坐标系之间的关系
表中内容
连杆长度 (length) :2个相邻关节轴线之间的距离
连杆扭角 (angle) :2个相邻关节轴线之间的角度
连杆偏距 (d) :2个关节坐标系的X轴之间的距离
eg:UR5e
- DH参数表
| 关节编号 | legth(mm) | d(mm) | angle(deg) |
|---|---|---|---|
| 1 | 0 | 162.5 | 90 |
| 2 | -425 | 0 | 0 |
| 3 | -392.2 | 0 | 0 |
| 4 | 0 | 133.3 | 90 |
| 5 | 0 | 99.7 | -90 |
| 6 | 0 | 99.6 | 0 |
计算
根据DH参数表以及
j
1
−
j
6
j_1 - j_6
j1−j6,建立6个关节矩阵
A
1
−
A
6
A_1-A_6
A1−A6,计算出转换矩阵
T
1
−
T
6
T_1-T_6
T1−T6,计算
A
1
−
A
6
A_1-A_6
A1−A6相乘得到矩阵R
R
=
[
r
o
t
3
∗
3
P
3
∗
1
0
1
∗
3
1
]
R=begin{bmatrix} {rot_{3*3}}&{P_{3*1}}\ {0_{1*3}}&{1}\ end{bmatrix}
R=[rot3∗301∗3P3∗11]
P
3
∗
1
=
(
x
,
y
,
z
)
T
P_{3*1}=(x,y,z)^T
P3∗1=(x,y,z)T
则求出R即求出x,y,z
关节矩阵
A
i
A_i
Ai由当前的关节的
j
i
j_i
ji和DH参数导出
设当前
j
i
j_i
ji为
β
beta
β,legth为
l
l
l,d为
d
d
d,angle为
α
alpha
α
A
i
=
[
c
o
s
β
−
s
i
n
β
c
o
s
α
s
i
n
β
s
i
n
α
l
c
o
s
β
s
i
n
β
c
o
s
β
c
o
s
α
−
c
o
s
β
s
i
n
α
l
s
i
n
β
0
s
i
n
α
c
o
s
α
d
0
0
0
1
]
A_i= left[ begin{matrix} cosbeta & -sinbeta cosalpha & sinbeta sinalpha & lcosbeta \ sinbeta & cosbeta cosalpha & -cosbeta sinalpha & lsinbeta \ 0 & sinalpha & cosalpha & d \ 0 & 0 & 0 & 1 end{matrix} right]
Ai=⎣
⎡cosβsinβ00−sinβcosαcosβcosαsinα0sinβsinα−cosβsinαcosα0lcosβlsinβd1⎦
⎤
R
=
A
1
A
2
A
3
A
4
A
5
A
6
R=A_1A_2A_3A_4A_5A_6
R=A1A2A3A4A5A6
然后再求rx,ry,rz
r
o
t
3
∗
3
=
[
r
00
r
01
r
02
r
10
r
11
r
12
r
20
r
21
r
22
]
rot_{3*3}= left[ begin{matrix} r_{00} & r_{01} & r_{02} \ r_{10} & r_{11} & r_{12} \ r_{20} & r_{21} & r_{22} \ end{matrix} right]
rot3∗3=⎣
⎡r00r10r20r01r11r21r02r12r22⎦
⎤
r
x
=
a
r
c
t
a
n
(
r
[
1
]
[
2
]
,
r
[
2
]
[
2
]
)
rx = arctan(r[1][2], r[2][2])
rx=arctan(r[1][2],r[2][2])
r
y
=
a
r
c
t
a
n
(
r
[
0
]
[
2
]
,
r
[
0
]
[
0
]
2
+
r
[
0
]
[
1
]
2
)
ry = arctan(r[0][2], sqrt{r[0][0] ^2 + r[0][1]^2})
ry=arctan(r[0][2],r[0][0]2+r[0][1]2)
r
z
=
a
r
c
t
a
n
(
r
[
0
]
[
1
]
,
r
[
0
]
[
0
]
)
rz = arctan(r[0][1], r[0][0])
rz=arctan(r[0][1],r[0][0])
代码(C++)
/* 6轴机器人运动正解
* 关节角度在文件我放在"D:\j.txt"中
* 机器人参数在文件"D:\dh.txt"中
* x,y,z,rx,ry,rz在屏幕输出
* 原代码来自https://blog.csdn.net/weixin_37942267/article/details/78806448?spm=1001.2014.3001.5502*/
#include <stdio.h>
#include<iostream>
#include <math.h>
#include <string.h>
#include <math.h>
using namespace std;
#define XYZ_F_J "D:\j.txt"
#define DESIGN_DT "D:\dh.txt"
#define RAD2ANG (3.1415926535898/180.0)
#define ANG2RAD (180.0/3.1415926535898)
#define IS_ZERO(var) if(abs(var) < 1e-6 ){var = 0;}
#define MATRIX_N 4
typedef struct {
double joint_v; //joint variable
double length;
double d;
double angle;
}param_t;
double matrix_A1[MATRIX_N][MATRIX_N];
double matrix_A2[MATRIX_N][MATRIX_N];
double matrix_A3[MATRIX_N][MATRIX_N];
double matrix_A4[MATRIX_N][MATRIX_N];
double matrix_A5[MATRIX_N][MATRIX_N];
double matrix_A6[MATRIX_N][MATRIX_N];
double matrix_toolxyz[MATRIX_N][MATRIX_N];
void initmatrix_A(param_t* p_table);
void calculate_matrix_A(double matrix[MATRIX_N][MATRIX_N], param_t* p_param);
void matrix_mul(double matrix_a[MATRIX_N][MATRIX_N],
double matrix_b[MATRIX_N][MATRIX_N],
double matrix_result[MATRIX_N][MATRIX_N]);
void matrix_add(double matrix_a[MATRIX_N][MATRIX_N],
double matrix_b[MATRIX_N][MATRIX_N],
double matrix_sum[MATRIX_N][MATRIX_N], int m, int n);
void matrix_copy(double matrix_a[MATRIX_N][MATRIX_N],
double matrix_b[MATRIX_N][MATRIX_N], int m, int n);
void initmatrix_tool(double toolx, double tooly, double toolz);
void printmatrix(double matrix[MATRIX_N][MATRIX_N], int m, int n)
{
int i, j;
for (i = 0; i < m; i++) {
for (j = 0; j < n; j++) {
printf(" %lf ", matrix[i][j]);
}
printf("n");
}
printf("n");
}
void printmatrix_1(double matrix[MATRIX_N][1], int m, int n)
{
int i, j;
for (i = 0; i < m; i++) {
for (j = 0; j < n; j++) {
printf(" %lf ", matrix[i][j]);
}
printf("n");
}
printf("n");
}
int main()
{
double matrix_T1[MATRIX_N][MATRIX_N];
double matrix_T2[MATRIX_N][MATRIX_N];
double matrix_T3[MATRIX_N][MATRIX_N];
double matrix_T4[MATRIX_N][MATRIX_N];
double matrix_T5[MATRIX_N][MATRIX_N];
double matrix_T6[MATRIX_N][MATRIX_N];
double toolx = 0, tooly = 0, toolz = 0, toolrx = 0, toolry = 0, toolrz = 0;
double worldx = 0, worldy = 0, worldz = 0, worldrx = 0, worldry = 0, worldrz = 0;
param_t param_table[6] = { 0 };
memset(param_table, 0, sizeof(param_table));
FILE* fp = NULL;
fp = fopen(XYZ_F_J, "r");
if (fp == NULL) {
perror("open J1_J6 file errorn");
return 0;
}
fscanf(fp, "%lf%lf%lf%lf%lf%lf",
¶m_table[0].joint_v,
¶m_table[1].joint_v,
¶m_table[2].joint_v,
¶m_table[3].joint_v,
¶m_table[4].joint_v,
¶m_table[5].joint_v
);
printf("j1...j6n%lf %lf %lf %lf %lf %lfn",
param_table[0].joint_v,
param_table[1].joint_v,
param_table[2].joint_v,
param_table[3].joint_v,
param_table[4].joint_v,
param_table[5].joint_v
);
//将机器人关节角度转换成弧度
param_table[0].joint_v *= RAD2ANG;
param_table[1].joint_v *= RAD2ANG;
param_table[2].joint_v *= RAD2ANG;
param_table[3].joint_v *= RAD2ANG;
param_table[4].joint_v *= RAD2ANG;
param_table[5].joint_v *= RAD2ANG;
fclose(fp);
fp = fopen(DESIGN_DT, "r");
if (fp == NULL) {
perror("open param_table file errorn");
return 0;
}
//读入关节参数
int i;
for (i = 0; i < 6; i++) {
fscanf(fp, "%lf%lf%lf",
¶m_table[i].length,
¶m_table[i].d,
¶m_table[i].angle);
}
fclose(fp);
param_table[0].angle *= RAD2ANG;
param_table[1].angle *= RAD2ANG;
param_table[2].angle *= RAD2ANG;
param_table[3].angle *= RAD2ANG;
param_table[4].angle *= RAD2ANG;
param_table[5].angle *= RAD2ANG;
initmatrix_A(param_table);
计算变换矩阵 matrix T1---T6
matrix_copy(matrix_A1, matrix_T1, MATRIX_N, MATRIX_N);
matrix_mul(matrix_T1, matrix_A2, matrix_T2);
matrix_mul(matrix_T2, matrix_A3, matrix_T3);
matrix_mul(matrix_T3, matrix_A4, matrix_T4);
matrix_mul(matrix_T4, matrix_A5, matrix_T5);
matrix_mul(matrix_T5, matrix_A6, matrix_T6);
float sy = sqrt(matrix_T6[0][0] * matrix_T6[0][0] + matrix_T6[0][1] * matrix_T6[0][1]);
bool singular = sy < 1e-6; // If
float rx, ry, rz;
if (!singular)
{
rx = atan2(-matrix_T6[1][2], matrix_T6[2][2]) * ANG2RAD;
ry = atan2(matrix_T6[0][2], sy) * ANG2RAD;
rz = atan2(-matrix_T6[0][1], matrix_T6[0][0]) * ANG2RAD;
}
else
{
rx = atan2(matrix_T6[2][1], matrix_T6[1][1]) * ANG2RAD;
ry = atan2(matrix_T6[0][2], sy) * ANG2RAD;
rz = 0;
}
IS_ZERO(rx);
IS_ZERO(ry);
IS_ZERO(rz);
printf("n----curent x, y, z, rx, ry,rz-----n%lf n %lfn %lfn %lf n %lfn %lfn ",
matrix_T6[0][3], matrix_T6[1][3],
matrix_T6[2][3], rx , ry , rz );
}
void initmatrix_A(param_t* p_table)
{//计算关节坐标矩阵 matrix A1--A6
calculate_matrix_A(matrix_A1, p_table + 0);
calculate_matrix_A(matrix_A2, p_table + 1);
calculate_matrix_A(matrix_A3, p_table + 2);
calculate_matrix_A(matrix_A4, p_table + 3);
calculate_matrix_A(matrix_A5, p_table + 4);
calculate_matrix_A(matrix_A6, p_table + 5);
}
void calculate_matrix_A(double matrix[MATRIX_N][MATRIX_N], param_t* p_param)
{//根据关节参数计算矩阵
double* pmatrix = (double*)matrix;
double value, var_c, var_s, angle_c, angle_s;
var_c = cos(p_param->joint_v);
IS_ZERO(var_c);
var_s = sin(p_param->joint_v);
IS_ZERO(var_s);
angle_c = cos(p_param->angle);
IS_ZERO(angle_c);
angle_s = sin(p_param->angle);
IS_ZERO(angle_s);
*pmatrix++ = var_c;
*pmatrix++ = -var_s * angle_c;
*pmatrix++ = var_s * angle_s;
*pmatrix++ = p_param->length * var_c;
*pmatrix++ = var_s;
*pmatrix++ = var_c * angle_c;
*pmatrix++ = -var_c * angle_s;
*pmatrix++ = p_param->length * var_s;
*pmatrix++ = 0;
*pmatrix++ = angle_s;
*pmatrix++ = angle_c;
*pmatrix++ = p_param->d;
*pmatrix++ = 0;
*pmatrix++ = 0;
*pmatrix++ = 0;
*pmatrix = 1;
}
void initmatrix_tool(double toolx, double tooly, double toolz)
{
matrix_toolxyz[0][0] = toolx;
matrix_toolxyz[1][0] = tooly;
matrix_toolxyz[2][0] = toolz;
/* 初始化 toolrx, tooly, toolz */
}
void matrix_mul(double matrix_a[MATRIX_N][MATRIX_N],
double matrix_b[MATRIX_N][MATRIX_N],
double matrix_result[MATRIX_N][MATRIX_N])
{
int i, j, k;
double sum;
/*嵌套循环计算结果矩阵(m*p)的每个元素*/
for (i = 0; i < MATRIX_N; i++)
for (j = 0; j < MATRIX_N; j++)
{
/*按照矩阵乘法的规则计算结果矩阵的i*j元素*/
sum = 0;
for (k = 0; k < MATRIX_N; k++)
sum += matrix_a[i][k] * matrix_b[k][j];
matrix_result[i][j] = sum;
}
}
void matrix_add(double matrix_a[MATRIX_N][MATRIX_N],
double matrix_b[MATRIX_N][MATRIX_N],
double matrix_sum[MATRIX_N][MATRIX_N], int m, int n)
{
int i, j;
for (i = 0; i < m; i++) {
for (j = 0; j < n; j++) {
matrix_sum[i][j] = matrix_a[i][j] + matrix_b[i][j];
}
}
}
void matrix_copy(double matrix_src[MATRIX_N][MATRIX_N],
double matrix_des[MATRIX_N][MATRIX_N], int m, int n)
{
int i, j;
for (i = 0; i < m; i++) {
for (j = 0; j < n; j++) {
matrix_des[i][j] = matrix_src[i][j];
}
}
}
验证(UR5e)
j . t x t : j.txt: j.txt:
| 57.3 | 57.3 | 57.3 | 57.3 | 57.3 | 57.3 |
|---|
输出:
| x | y | z | rx | ry | rz |
|---|---|---|---|---|---|
| 174.032973 | -75.257828 | -464.848688 | -106.158882 | 64.782997 | 67.592110 |
robodk C#API结果:
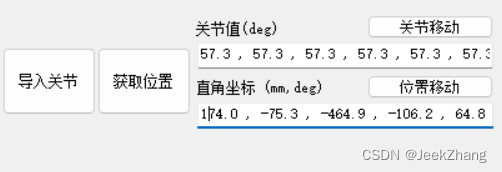
| x | y | z | rx | ry | rz |
|---|---|---|---|---|---|
| 174.0 | -75.3 | -464.9 | -106.2 | 64.8 | 67.6 |
参考资料:
6轴机器人运动学正解,逆解1
机器人导论 学习笔记2 - 运动学(正解)
欧拉角,四元数,旋转矩阵相互转化(c++, python)
最后
以上就是醉熏小霸王最近收集整理的关于6轴机器人运动学(正解)理论部分的全部内容,更多相关6轴机器人运动学(正解)理论部分内容请搜索靠谱客的其他文章。








发表评论 取消回复