来源丨 古月居
点击进入—>3D视觉工坊学习交流群
1. 基本原理
A*算法的本质是广度优先的图搜索.意在寻找一个从起点到目标节点的最短路径.
A*算法在Dijkstra的基础上加入了启发式变量,一般用启发式距离(两点的直线距离)表示.
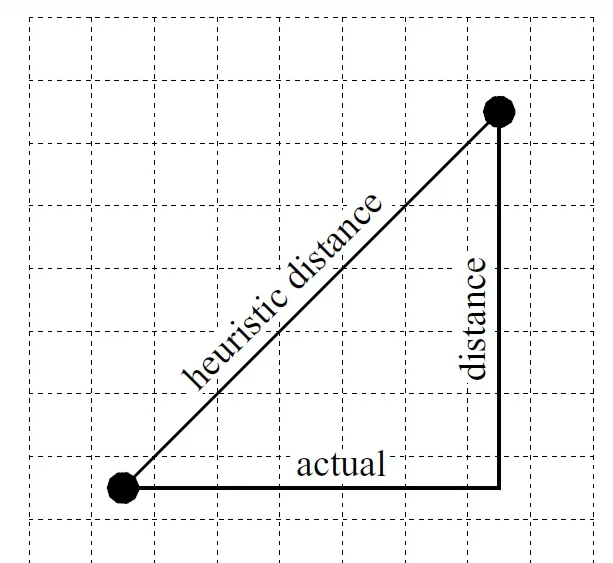
启发式距离
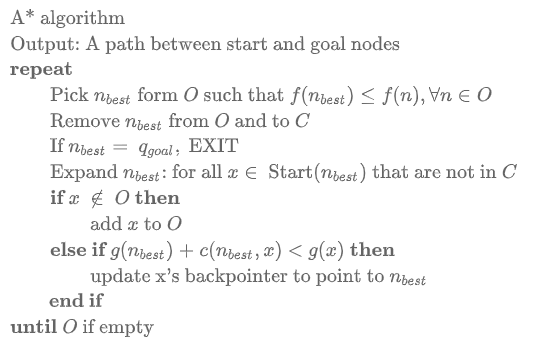
2. 算法伪代码
本伪代码摘取自Principles of Robot Motion
其中O代表优先队列,C存放着已访问过的节点.
3. 关键C++代码剖析
先来看看A*算法运行的最终结果吧
首先先创建一个类代表节点(省略了构造函数等Method).
class node {
private:
int x, y; // 坐标
double sumCost; // f(n)
double heuristic;// 启发值
bool obstacle; // 是否是障碍物
node* backpoint; // 前驱节点
bool isVisited; // 判断是否访问过
};在main函数中定义起始节点和目标节点
node startNode(40, 10);// 起始点
node goalNode(10, 40); // 目标点初始化地图,这里计算了每个节点的启发式距离
for (int i = 0; i < mapSize; ++i) {
vector<node*> tmp;
for (int j = 0; j < mapSize; ++j) {
node* tmpNode = new node(i, j);
tmpNode->setHeuristic(calHeristic(tmpNode, goalNode));
tmp.push_back(tmpNode);
}
roadmap.push_back(tmp);
}添加障碍物
void defineObstacle(vector<vector<node*>>& roadmap) {
// 先框住四周
for (int i = 0; i < mapSize; ++i) {
roadmap[0][i]->setObstacle();
roadmap[i][0]->setObstacle();
roadmap[i][mapSize - 1]->setObstacle();
roadmap[mapSize - 1][i]->setObstacle();
}
// 再定义一个条形快
for (int i = 1; i < mapSize / 2; ++i) {
roadmap[mapSize * 2 / 3][i]->setObstacle();
roadmap[mapSize * 2 / 3 - 1][i]->setObstacle();
roadmap[mapSize * 1 / 3][mapSize - i]->setObstacle();
roadmap[mapSize * 1 / 3 - 1][mapSize - i]->setObstacle();
}
}A*算法函数
void aStar(const node& startNode, const node& goalNode, vector<vector<node*>>& roadmap, Mat& background) {
// 使用Lambda表达式定义一个优先队列
auto cmp = [](node* left, node* right) { return left->gN() > right->gN(); };
priority_queue<node*, vector<node*>, decltype(cmp)> O(cmp);
node* tmp = roadmap[startNode.coordinateX()][startNode.coordinateY()];
O.push(tmp);
// Algorithm 24 A* Algorithm
while (!O.empty()) {
// Pick nbest from O such that f(nbest) <= f(n).
node* nBest = O.top();
// Remove nbest from O and add to C(isVisited).
O.pop();
nBest->setIsVisited();
// if nbest == qgoal, EXIT.
if (*nBest == goalNode)
break;
// 八个方向都可以走
std::vector<node> motion = { node(1, 0, 1),
node(0, 1, 1),
node(-1, 0, 1),
node(0, -1, 1),
node(-1, -1, std::sqrt(2)),
node(-1, 1, std::sqrt(2)),
node(1, -1, std::sqrt(2)),
node(1, 1, std::sqrt(2)) };
for (int i = 0; i < 8; i++) {
node tmpNode = motion[i];
tmpNode += *nBest;
node* tmpNodePointer = roadmap[tmpNode.coordinateX()][tmpNode.coordinateY()];
*tmpNodePointer = tmpNode;
if (verifyNode(*tmpNodePointer) && !tmpNodePointer->returnIsVisited() && !tmpNodePointer->isObstacle()) {
O.push(tmpNodePointer);
tmpNodePointer->setIsVisited();
tmpNodePointer->setBackpoint(nBest);
tmpNodePointer->drawNode(background, imgGridSize, Scalar(0, 255, 0), 0);
imshow("aStar", background);
waitKey(5);
}
}
}
// 画出最终的路径
tmp = roadmap[goalNode.coordinateX()][goalNode.coordinateY()];
while (!(*tmp == startNode)) {
tmp->drawNode(background, imgGridSize, Scalar(255, 0, 0));
tmp = tmp->returnBackpoint();
imshow("aStar", background);
waitKey(5);
}
}4. 资源指路
A*算法其中大部分变量和算法过程我都尽量和Principles of Motion中的说明保持一致,源代码已上传github(非工程文件,需自行配置),有不明白的可以在评论区留言,我会尽量回复
https://link.zhihu.com/?target=https%3A//github.com/kushuaiming/PathPalnning
本文仅做学术分享,如有侵权,请联系删文。
点击进入—>3D视觉工坊学习交流群
干货下载与学习
后台回复:巴塞罗那自治大学课件,即可下载国外大学沉淀数年3D Vison精品课件
后台回复:计算机视觉书籍,即可下载3D视觉领域经典书籍pdf
后台回复:3D视觉课程,即可学习3D视觉领域精品课程
3D视觉工坊精品课程官网:3dcver.com
1.面向自动驾驶领域的3D点云目标检测全栈学习路线!(单模态+多模态/数据+代码)
2.彻底搞透视觉三维重建:原理剖析、代码讲解、及优化改进
3.国内首个面向工业级实战的点云处理课程
4.激光-视觉-IMU-GPS融合SLAM算法梳理和代码讲解
5.彻底搞懂视觉-惯性SLAM:基于VINS-Fusion正式开课啦
6.彻底搞懂基于LOAM框架的3D激光SLAM: 源码剖析到算法优化
7.彻底剖析室内、室外激光SLAM关键算法原理、代码和实战(cartographer+LOAM +LIO-SAM)
8.从零搭建一套结构光3D重建系统[理论+源码+实践]
9.单目深度估计方法:算法梳理与代码实现
10.自动驾驶中的深度学习模型部署实战
11.相机模型与标定(单目+双目+鱼眼)
12.重磅!四旋翼飞行器:算法与实战
13.ROS2从入门到精通:理论与实战
14.国内首个3D缺陷检测教程:理论、源码与实战
15.基于Open3D的点云处理入门与实战教程
16.透彻理解视觉ORB-SLAM3:理论基础+代码解析+算法改进
重磅!粉丝学习交流群已成立
交流群主要有3D视觉、CV&深度学习、SLAM、三维重建、点云后处理、自动驾驶、多传感器融合、CV入门、三维测量、VR/AR、3D人脸识别、医疗影像、缺陷检测、行人重识别、目标跟踪、视觉产品落地、视觉竞赛、车牌识别、硬件选型、ORB-SLAM系列源码交流、深度估计、TOF、求职交流等方向。
扫描以下二维码,添加小助理微信(dddvisiona),一定要备注:研究方向+学校/公司+昵称,例如:”3D视觉 + 上海交大 + 静静“。请按照格式备注,可快速被通过且邀请进群。原创投稿也请联系。

▲长按加微信群或投稿,微信号:dddvisiona
3D视觉从入门到精通知识星球:针对3D视觉领域的视频课程(三维重建系列、三维点云系列、结构光系列、手眼标定、相机标定、激光/视觉SLAM、自动驾驶等)、源码分享、知识点汇总、入门进阶学习路线、最新paper分享、疑问解答等进行深耕,更有各类大厂的算法工程人员进行技术指导。与此同时,星球将联合知名企业发布3D视觉相关算法开发岗位以及项目对接信息,打造成集技术与就业为一体的铁杆粉丝聚集区,6000+星球成员为创造更好的AI世界共同进步,知识星球入口:
学习3D视觉核心技术,扫描查看,3天内无条件退款

高质量教程资料、答疑解惑、助你高效解决问题
觉得有用,麻烦给个赞和在看~
最后
以上就是老实哈密瓜最近收集整理的关于机器人路径规划之A*算法(附C++源码)的全部内容,更多相关机器人路径规划之A*算法(附C++源码)内容请搜索靠谱客的其他文章。








发表评论 取消回复