Content
- 1. Linear time-incariant (LTI) control (线性时不变控制)
- 1.1 汽车控制概述
- 1.2 线性时不变系统
- 1.3 常见的反馈系统
- 2. PID Control(PID控制)
- 2.1 PID控制基本形式
- 2.2 PID对应参数的调节效果
- 2.3 举例:二阶系统(重物弹簧阻尼系统)
1. Linear time-incariant (LTI) control (线性时不变控制)
1.1 汽车控制概述
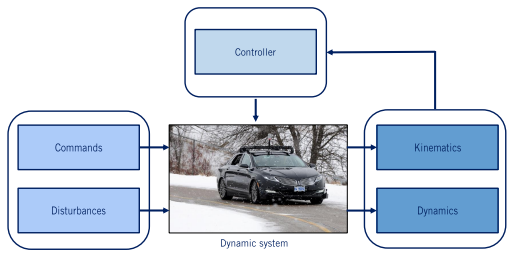
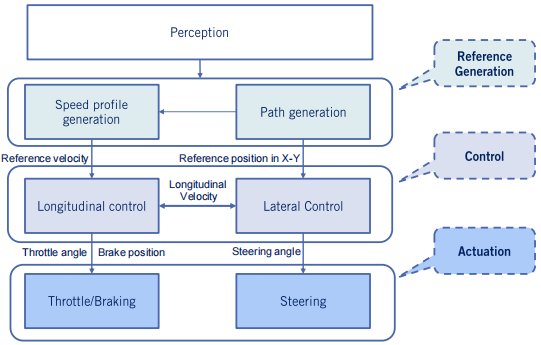
当我们看到一辆无人驾驶汽车在拐弯时,我们会疑惑它是怎么做到的,下面就说一说实现拐弯的整个大致流程。
前面我们讲过,无人车和外界的交互首先来源于环境感知,接着根据对环境的理解和需求做出相应的决策和规划,这时候已经得到了一条想要车辆接下来行驶的轨迹和速度。有了轨迹应该去真正的跑出来啊。。。这时候就需要一个控制器(controller) 去控制汽车了。
但是,是不是直接把轨迹的信息丢给控制器呢?注意不是这样的。因为轨迹的信息是对整辆汽车而言的,也就是它表示整辆汽车的运动趋势;但控制器控制的是油门、脚刹、档位和方向盘,所以他需要的是后轮的速度和前轮方向的信息。所以还需要把轨迹的信息也就是无人车此时的指令(commands) 转化为控制器能够理解的控制信息。
要实现这个转换,需要去分析汽车的构造和动力等等信息,记不记得前面所讲的运动学(kinematics)模型和动力学(dynamics)模型,那些模型最后总结出来的速度、加速度、角度等等之间的关系,其实就是为了设计控制器用的。所以,这两个模型实现了这一个转化过程。但是,别忘了汽车是开在路上的,而我们之前的汽车建模考虑了很少的环境干扰因素,所以这时候应该把环境的干扰(disturbances) 加入到轨迹信息中。
个人补充:其实把运动学模型和动力学模型嵌入到控制器里面,就可以实现直接从轨迹信息到实际控制。
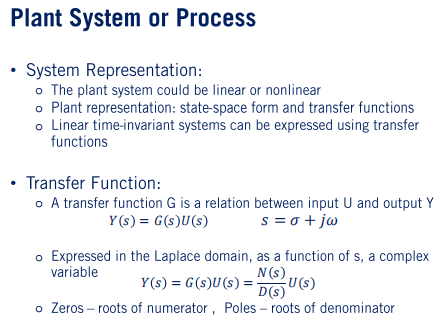
1.2 线性时不变系统
线性时不变 = 线性+时不变
(1)线性:齐次性+叠加性
①齐次性:f(kx)=k*f(x)
②叠加性:f(a+b)=f(a)+f(b)
(2)时不变:即系统参数不随时间而改变,例如车辆的两个模型参数不随时间变化。
1.3 常见的反馈系统
这部分需要由控制理论的基础,下面这个系统是最简单的负反馈系统。
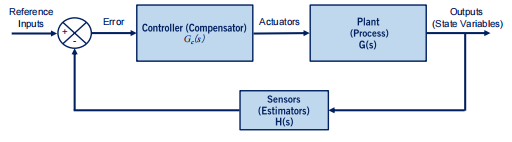
同时,拉普拉斯变换是控制理论最常用的东西。
2. PID Control(PID控制)
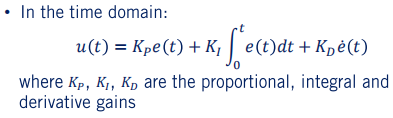
2.1 PID控制基本形式
(1)时域上:补偿量u(t)和偏差量e(t)的关系
(2)经过拉氏变换后:
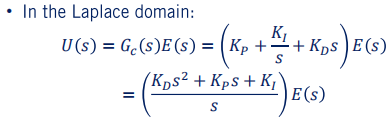
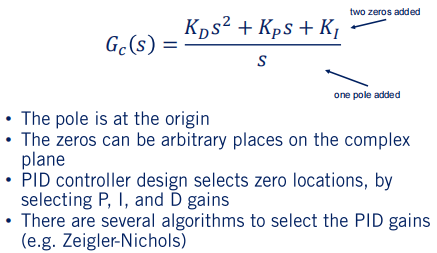
(3)获得最关键的传递函数G(s):表示补偿量与偏差之间的关系。
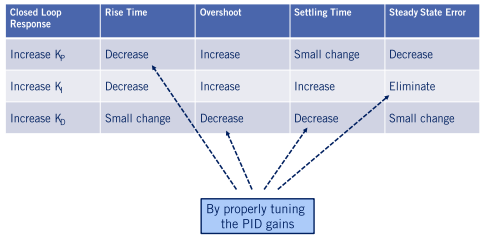
2.2 PID对应参数的调节效果
Rise Time(上升时间)
Overshoot(振荡)
Setting Time(稳定时间)
Steady State Error(稳态误差)
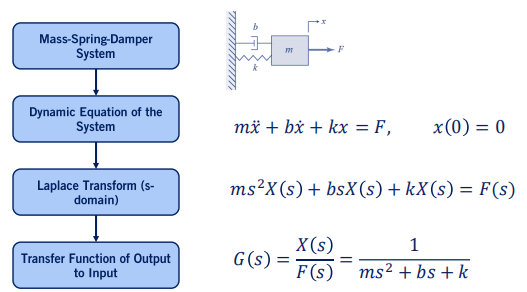
2.3 举例:二阶系统(重物弹簧阻尼系统)
重物弹簧阻尼系统→建立动力学方程→拉氏变换→得到位移和力的关系。
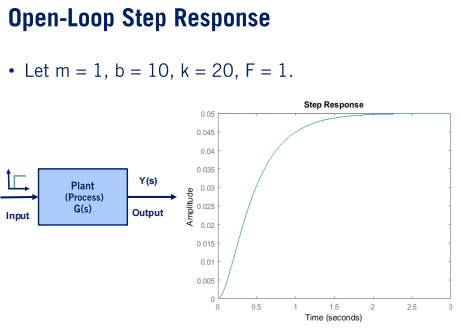
(1)开环系统(Open-Loop):给定力,直接得到位移输出。
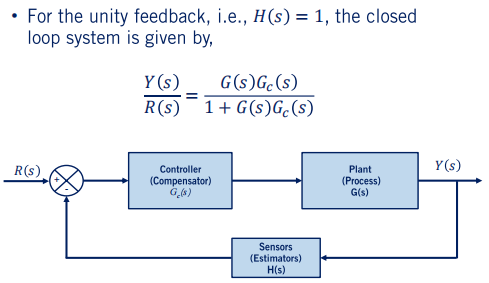
(2)闭环系统(Closed-Loop):加上位移误差的负反馈
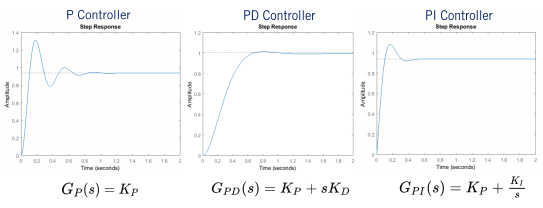
(3)除了使用PID控制,还可以只使用PID三个中的某几个:
最后
以上就是优雅故事最近收集整理的关于P1_M5_L1 Proportional-Integral-Derivative(PID) Control(比例-积分-微分:PID控制)的全部内容,更多相关P1_M5_L1内容请搜索靠谱客的其他文章。








发表评论 取消回复