eband_local_planner.h/cpp 解读
- eband_->setplan()
- refineBand()
- removeAndFill()
- interpolateBubbles()
- eband_->optimizeBand()
- calcObstacleKinematicDistance()
- modifyBandArtificialForce()
- calcInternalForces() 计算内力
- calcExternalForces() 计算外力
- suppressTangentialForces() 移除切向力
- applyForces()
- 结语
不知道这一篇还有没有人看…
这两个文件构成了算法的核心, 上一篇文章讲到在 eband_local_planner_ros.cpp 里, EBandPlannerROS::setplan 将全局路径通过之前 conversions_and_types.cpp 讲过的函数 “截断” 到局部, 之后交给 EBandPlanner eband_ 来操作 .
大家有兴趣可以改改代码, 打印打印信息看一下, 上面截断的全局路径在代码中反映的是一个数组, 数组每个元素由点的位置和姿态组成, 点的位置自然就是路径中的每个离散点在 map 下的坐标, 点的姿态只有终点被赋值, 中间的所有点的初始姿态都被赋值为0, 事实上, eband_->optimizeBand() 里会计算优化后的姿态数据(在2D 导航里也就是朝向)
下面我们直接来看 eband_->setplan() 和 eband_->optimizeBand()
eband_->setplan()
setplan 将截断的全局路径赋值给内置变量, 并优化路径里离散点的个数(全局路径点太密集了)
// 函数传入参数: 已经被截断的全局路径,即局部路径, 还未被优化
bool EBandPlanner::setPlan(
const std::vector<geometry_msgs::PoseStamped> &global_plan) {
// check if plugin initialized
if (!initialized_) {
ROS_ERROR("This planner has not been initialized, please call initialize() "
"before using this planner");
return false;
}
// check if plan valid (minimum 2 frames)
if (global_plan.size() < 2) {
ROS_ERROR("Attempt to pass empty path to optimization. Valid path needs to "
"have at least 2 Frames. This one has %d.",
((int)global_plan.size()));
return false;
}
// copy plan to local member variable
// 赋值给内部的成员变量, 下一步送去 optimizeBand() 优化
global_plan_ = global_plan;
// check whether plan and costmap are in the same frame
if (global_plan.front().header.frame_id != costmap_ros_->getGlobalFrameID()) {
ROS_ERROR("Elastic Band expects plan for optimization in the %s frame, the "
"plan was sent in the %s frame.",
costmap_ros_->getGlobalFrameID().c_str(),
global_plan.front().header.frame_id.c_str());
return false;
}
// convert frames in path into bubbles in band -> sets center of bubbles and
// calculates expansion
ROS_DEBUG("Converting Plan to Band");
// 截至到这里,把传入的直接从 global 全局路径粗暴局部截断的路径转化成泡泡路径
if (!convertPlanToBand(global_plan_, elastic_band_)) {
ROS_WARN("Conversion from plan to elastic band failed. Plan probably not "
"collision free. Plan not set for optimization");
// TODO try to do local repairs of band
return false;
}
// close gaps and remove redundant bubbles
ROS_DEBUG("Refining Band");
// 如果路径中点太密集, 将会去除掉冗余点, 如果点太稀疏, 会插值补充
if (!refineBand(elastic_band_)) {
ROS_WARN("Band is broken. Could not close gaps in converted path. Path not "
"set. Global replanning needed");
return false;
}
ROS_DEBUG("Refinement done - Band set.");
return true;
}
setplan 函数最后调用了 refineBand 函数来优化路径中间点个数, 而 refineBand 简单的调用了 removeAndFill
refineBand()
bool EBandPlanner::refineBand(std::vector<Bubble> &band) {
// check if plugin initialized
if (!initialized_) {
ROS_ERROR("This planner has not been initialized, please call initialize() "
"before using this planner");
return false;
}
// check if band valid (minimum 2 bubbles)
if (band.size() < 2) {
ROS_WARN("Attempt to convert empty band to plan. Valid band needs to have "
"at least 2 Frames. This one has %d.",
((int)band.size()));
return false;
}
// instantiate local variables
bool success;
std::vector<Bubble> tmp_band;
std::vector<Bubble>::iterator start_iter, end_iter;
// remove redundant Bubbles and fill gabs recursively
tmp_band = band;
start_iter = tmp_band.begin();
end_iter = (tmp_band.end() - 1); // -1 because .end() points "past the end"!
success = removeAndFill(tmp_band, start_iter, end_iter);
if (!success)
ROS_DEBUG("Band is broken. Could not close gaps.");
else {
#ifdef DEBUG_EBAND_
ROS_DEBUG("Recursive filling and removing DONE");
#endif
band = tmp_band;
}
return success;
}
removeAndFill()
来看看 removeAndFill 在干嘛, 大家可以看看源码里用于 debug 模式的一些调试代码, 里面其实展示了代码中每个步骤的很多信息.
这个函数主要用二分法来处理泡泡路径带, 发现每两个点之间距离太近就移除, 发现隔得太远就插值.
bool EBandPlanner::removeAndFill(std::vector<Bubble> &band,
std::vector<Bubble>::iterator &start_iter,
std::vector<Bubble>::iterator &end_iter) {
// instantiate local variables
bool overlap;
std::vector<Bubble>::iterator tmp_iter;
int mid_int, diff_int;
#ifdef DEBUG_EBAND_
int debug_dist_start, debug_dist_iters;
debug_dist_start = std::distance(band.begin(), start_iter);
debug_dist_iters = std::distance(start_iter, end_iter);
ROS_DEBUG("Refining Recursive - Check if Bubbles %d and %d overlapp. Total "
"size of band %d.",
debug_dist_start, (debug_dist_start + debug_dist_iters),
((int)band.size()));
#endif
// check that iterators are still valid
ROS_ASSERT(start_iter >= band.begin());
ROS_ASSERT(
end_iter <
band.end()); // "<" because .end() points _behind_ last element of vector
ROS_ASSERT(start_iter < end_iter);
// check whether start and end bubbles of this intervall overlap
overlap = checkOverlap(*start_iter, *end_iter);
if (overlap) {
#ifdef DEBUG_EBAND_
ROS_DEBUG("Refining Recursive - Bubbles overlapp, check for redundancies");
#endif
// if there are bubbles between start and end of intervall remove them (they
// are redundant as start and end of intervall do overlap)
if ((start_iter + 1) < end_iter) {
#ifdef DEBUG_EBAND_
ROS_DEBUG(
"Refining Recursive - Bubbles overlapp, removing Bubbles %d to %d.",
(debug_dist_start + 1), (debug_dist_start + debug_dist_iters - 1));
#endif
// erase bubbles between start and end (but not start and end themself)
// and get new iterator to end (old one is invalid)
tmp_iter = band.erase((start_iter + 1), end_iter);
// write back changed iterator pointing to the end of the intervall
end_iter = tmp_iter;
}
#ifdef DEBUG_EBAND_
ROS_DEBUG("Refining Recursive - Bubbles overlapp - DONE");
#endif
// we are done here (leaf of this branch is reached)
return true;
}
// if bubbles do not overlap -> check whether there are still bubbles between
// start and end
if ((start_iter + 1) < end_iter) {
#ifdef DEBUG_EBAND_
ROS_DEBUG("Refining Recursive - Bubbles do not overlapp, go one recursion "
"deeper");
#endif
// split remaining sequence of bubbles
// get distance between start and end iterator for this intervall
mid_int = std::distance(start_iter, end_iter);
mid_int = mid_int / 2; // division by integer implies floor (round down)
// now get iterator pointing to the middle (roughly)
tmp_iter = start_iter + mid_int;
// and realative position of end_iter to tmp_iter
diff_int = (int)std::distance(tmp_iter, end_iter);
// after all this arithmetics - check that iterators are still valid
ROS_ASSERT(start_iter >= band.begin());
ROS_ASSERT(end_iter < band.end()); // "<" because .end() points _behind_
// last element of vector
ROS_ASSERT(start_iter < end_iter);
// and call removeAndFill recursively for the left intervall
if (!removeAndFill(band, start_iter, tmp_iter)) {
// band is broken in this intervall and could not be fixed
return false;
}
// carefull at this point!!! if we filled in or removed bubbles end_iter is
// not valid anymore but the relative position towards tmp_iter is still the
// same and tmp_iter was kept valid in the lower recursion steps
end_iter = tmp_iter + diff_int;
// check that iterators are still valid - one more time
ROS_ASSERT(start_iter >= band.begin());
ROS_ASSERT(end_iter < band.end()); // "<" because .end() points _behind_
// last element of vector
ROS_ASSERT((start_iter < tmp_iter) && (tmp_iter < end_iter));
// o.k. we are done with left hand intervall now do the same for the right
// hand intervall but first get relative position of start and tmp iter
diff_int = (int)std::distance(start_iter, tmp_iter);
if (!removeAndFill(band, tmp_iter, end_iter)) {
// band is broken in this intervall and could not be fixed
return false;
}
// if we filled in bubbles vector might have been reallocated -> start_iter
// might be invalid
start_iter = tmp_iter - diff_int;
// check that iterators are still valid - almost done
ROS_ASSERT(start_iter >= band.begin());
ROS_ASSERT(end_iter < band.end()); // "<" because .end() points _behind_
// last element of vector
ROS_ASSERT((start_iter < tmp_iter) && (tmp_iter < end_iter));
// we reached the leaf but we are not yet done
// -> we know that there are no redundant elements in the left intervall
// taken on its own
// -> and we know the same holds for the right intervall
// but the middle bubble itself might be redundant -> check it
if (checkOverlap(*(tmp_iter - 1), *(tmp_iter + 1))) {
#ifdef DEBUG_EBAND_
ROS_DEBUG("Refining Recursive - Removing middle bubble");
#endif
// again: get distance between (tmp_iter + 1) and end_iter, (+1 because we
// will erase tmp_iter itself)
diff_int = (int)std::distance((tmp_iter + 1), end_iter);
// remove middle bubble and correct end_iter
tmp_iter = band.erase(tmp_iter);
end_iter = tmp_iter + diff_int;
}
// check that iterators are still valid - almost almost
ROS_ASSERT(start_iter >= band.begin());
ROS_ASSERT(end_iter < band.end()); // "<" because .end() points _behind_
// last element of vector
ROS_ASSERT(start_iter < end_iter);
#ifdef DEBUG_EBAND_
ROS_DEBUG("Refining Recursive - Bubbles do not overlapp, go one recursion "
"deeper DONE");
#endif
// now we are done with this case
return true;
}
#ifdef DEBUG_EBAND_
ROS_DEBUG("Refining Recursive - Gap detected, fill recursive");
#endif
// last possible case -> bubbles do not overlap AND there are nor bubbles in
// between -> try to fill gap recursively
if (!fillGap(band, start_iter, end_iter)) {
// band is broken in this intervall and could not be fixed (this should only
// be called on a leaf, so we put a log_out here;)
ROS_DEBUG("Failed to fill gap between bubble %d and %d.",
(int)distance(band.begin(), start_iter),
(int)distance(band.begin(), end_iter));
return false;
}
#ifdef DEBUG_EBAND_
ROS_DEBUG("Refining Recursive - Gap detected, fill recursive DONE");
#endif
// we could fill the gap (reached leaf of this branch)
return true;
}
interpolateBubbles()
插值函数是 interpolateBubbles, 这个函数先调用 fillGap , 再在 fillGap 里调用 interpolateBubbles, interpolateBubbles 直接使用中值插值, 位置和姿态一起插
bool EBandPlanner::interpolateBubbles(
geometry_msgs::PoseStamped start_center,
geometry_msgs::PoseStamped end_center,
geometry_msgs::PoseStamped &interpolated_center) {
// check if plugin initialized
if (!initialized_) {
ROS_ERROR("This planner has not been initialized, please call initialize() "
"before using this planner");
return false;
}
// instantiate local variables
geometry_msgs::Pose2D start_pose2D, end_pose2D, interpolated_pose2D;
double delta_theta;
// copy header
interpolated_center.header = start_center.header;
// interpolate angles
// TODO make this in a better way
// - for instance use "slerp" to interpolate directly between quaternions
// - or work with pose2D right from the beginnning
// convert quaternions to euler angles - at this point this no longer works in
// 3D !!
PoseToPose2D(start_center.pose, start_pose2D);
PoseToPose2D(end_center.pose, end_pose2D);
// calc mean of theta angle
delta_theta = end_pose2D.theta - start_pose2D.theta;
delta_theta = angles::normalize_angle(delta_theta) / 2.0;
interpolated_pose2D.theta = start_pose2D.theta + delta_theta;
interpolated_pose2D.theta =
angles::normalize_angle(interpolated_pose2D.theta);
// convert back to quaternion
interpolated_pose2D.x = 0.0;
interpolated_pose2D.y = 0.0;
Pose2DToPose(interpolated_center.pose, interpolated_pose2D);
// interpolate positions
interpolated_center.pose.position.x =
(end_center.pose.position.x + start_center.pose.position.x) / 2.0;
interpolated_center.pose.position.y =
(end_center.pose.position.y + start_center.pose.position.y) / 2.0;
interpolated_center.pose.position.z =
(end_center.pose.position.z + start_center.pose.position.z) / 2.0;
// TODO ideally this would take into account kinematics of the robot and for
// instance use splines
return true;
}
eband_->optimizeBand()
这个函数实现论文算法, 输入截断的全局路径,输出优化后的路径, 注意这个函数是个重载函数, 在无参数版本里调用有参数版本
无参数版本 :
bool EBandPlanner::optimizeBand() {
// check if plugin initialized
if (!initialized_) {
ROS_ERROR("This planner has not been initialized, please call initialize() "
"before using this planner");
return false;
}
// check if there is a band
if (elastic_band_.empty()) {
ROS_ERROR("Band is empty. Probably Band has not been set yet");
return false;
}
// call optimization with member elastic_band_
ROS_DEBUG("Starting optimization of band");
// 调用有参数版本
if (!optimizeBand(elastic_band_)) {
ROS_DEBUG("Aborting Optimization. Changes discarded.");
return false;
}
ROS_DEBUG("Elastic Band - Optimization successfull!");
return true;
}
有参数版本 :
有参数版本依次调用了如下几个函数:
- calcObstacleKinematicDistance(): 通过 costmap_2d 初始化泡泡的半径
- refineBand(): 在算法优化之前, 先对整条泡泡路径进行一次小优化, 主要包括去除冗余泡泡和泡泡插值
- modifyBandArtificialForce(): 论文算法实现部分, 生成算法优化后的泡泡路径
- refineBand(): 在算法优化之后, 再对整条泡泡路径进行一次小优化
bool EBandPlanner::optimizeBand(std::vector<Bubble> &band) {
// check if plugin initialized
if (!initialized_) {
ROS_ERROR("This planner has not been initialized, please call initialize() "
"before using this planner");
return false;
}
// check whether band and costmap are in the same frame
if (band.front().center.header.frame_id != costmap_ros_->getGlobalFrameID()) {
ROS_ERROR("Elastic Band expects plan for optimization in the %s frame, the "
"plan was sent in the %s frame.",
costmap_ros_->getGlobalFrameID().c_str(),
band.front().center.header.frame_id.c_str());
return false;
}
double distance;
for (int i = 0; i < ((int)band.size()); i++) {
// update Size of Bubbles in band by calculating Dist to nearest Obstacle
// [depends kinematic, environment]
if (!calcObstacleKinematicDistance(band.at(i).center.pose, distance)) {
ROS_DEBUG("Optimization (Elastic Band) - Calculation of Distance failed. "
"Frame %d of %d Probably outside map coordinates.",
i, ((int)band.size()));
return false;
}
if (distance == 0.0) {
// frame must not be immediately in collision -> otherwise calculation of
// gradient will later be invalid
ROS_DEBUG(
"Optimization (Elastic Band) - Calculation of Distance failed. Frame "
"%d of %d in collision. Plan invalid. Trying to refine band.",
i, ((int)band.size()));
// TODO if frame in collision try to repair band instead of aborting
// everything
return false;
}
band.at(i).expansion = distance;
}
// close gaps and remove redundant bubbles
if (!refineBand(band)) {
ROS_DEBUG("Elastic Band is broken. Could not close gaps in band. Global "
"replanning needed.");
return false;
}
// get a copy of current (valid) band
std::vector<Bubble> tmp_band = band;
// now optimize iteratively (for instance by miminizing the energy-function of
// the full system)
for (int i = 0; i < num_optim_iterations_; i++) {
ROS_DEBUG("Inside optimization: Cycle no %d", i);
// ROS_INFO("�33[1;32mInside optimization: Cycle no %d�33[0m", i);
// calculate forces and apply changes
if (!modifyBandArtificialForce(tmp_band)) {
ROS_DEBUG("Optimization failed while trying to modify Band.");
// something went wrong -> discard changes and stop process
return false;
}
// check whether band still valid - refine if neccesarry
if (!refineBand(tmp_band)) {
ROS_DEBUG("Optimization failed while trying to refine modified band");
// modified band is not valid anymore -> discard changes and stop process
return false;
}
// copy changes back to band
band = tmp_band;
return true;
}
calcObstacleKinematicDistance()
这个函数很简单, 拿costmap 的占有值去除以一个参数因子 weight 获得距离, 这个参数在 yaml 文件里叫 costmap_weight, 怎么调参就靠手感了
bool EBandPlanner::calcObstacleKinematicDistance(
geometry_msgs::Pose center_pose, double &distance) {
// calculate distance to nearest obstacle [depends kinematic, shape,
// environment]
// check if plugin initialized
if (!initialized_) {
ROS_ERROR("This planner has not been initialized, please call initialize() "
"before using this planner");
return false;
}
unsigned int cell_x, cell_y;
unsigned char disc_cost;
double weight = costmap_weight_;
// read distance to nearest obstacle directly from costmap
// (does not take into account shape and kinematic properties)
// get cell for coordinates of bubble center
if (!costmap_->worldToMap(center_pose.position.x, center_pose.position.y,
cell_x, cell_y)) {
// probably at the edge of the costmap - this value should be recovered soon
disc_cost = 1;
} else {
// get cost for this cell
disc_cost = costmap_->getCost(cell_x, cell_y);
}
// calculate distance to nearest obstacel from this cost (see costmap_2d in
// wiki for details)
// For reference: here comes an excerpt of the cost calculation within the
// costmap function
/*if(distance == 0)
cost = LETHAL_OBSTACLE;
else if(distance <= cell_inscribed_radius_)
cost = INSCRIBED_INFLATED_OBSTACLE;
else {
//make sure cost falls off by Euclidean distance
double euclidean_distance = distance * resolution_;
double factor = exp(-1.0 * weight_ * (euclidean_distance -
inscribed_radius_)); cost = (unsigned char) ((INSCRIBED_INFLATED_OBSTACLE - 1)
* factor);
}*/
if (disc_cost == costmap_2d::LETHAL_OBSTACLE) { // 254
// pose is inside an obstacle - very bad
distance = 0.0;
} else if (disc_cost == costmap_2d::INSCRIBED_INFLATED_OBSTACLE) { // 253
// footprint is definitely inside an obstacle - still bad
distance = 0.0;
} else {
if (disc_cost == 0) { // freespace, no estimate of distance
disc_cost = 1; // lowest non freespace cost
} else if (disc_cost == 255) { // unknown space, we should never be here
disc_cost = 1;
}
// factor 算出来一般是 1 / 253-1 = 0.004
double factor =
((double)disc_cost) / (costmap_2d::INSCRIBED_INFLATED_OBSTACLE - 1);
// ln(0.004) = -5.521
distance = -log(factor) / weight;
// ROS_INFO("factor: %.3f", factor);
}
// ROS_INFO("disc_cost: %d distance: %.3f", disc_cost, distance);
return true;
}
modifyBandArtificialForce()
先复习一下论文, 论文中为了维持弹力带平衡, 需要计算弹力带中每个泡泡的内力和外力(斥力), 并消除切向力影响, 代码流程与论文一致, 依次调用计算内力、计算斥力及计算排斥力的函数, 算完之后把力作用到泡泡上,即修改路径
bool EBandPlanner::modifyBandArtificialForce(std::vector<Bubble> &band) {
ROS_INFO("�33[1;32m In modifyBandArtificialForce�33[0m");
if (band.empty()) {
ROS_ERROR("Trying to modify an empty band.");
return false;
}
if (band.size() <= 2) {
// nothing to do here -> we can stop right away
return true;
}
std::vector<geometry_msgs::WrenchStamped> internal_forces, external_forces,
forces;
geometry_msgs::WrenchStamped wrench;
#ifdef DEBUG_EBAND_
// publish original band
if (visualization_)
eband_visual_->publishBand("bubbles", band);
#endif
// init variables to calm down debug warnings
// 这是一个力螺旋, 有力和力矩
wrench.header.stamp = ros::Time::now();
wrench.header.frame_id = band[0].center.header.frame_id;
wrench.wrench.force.x = 0.0;
wrench.wrench.force.y = 0.0;
wrench.wrench.force.z = 0.0;
wrench.wrench.torque.x = 0.0;
wrench.wrench.torque.y = 0.0;
wrench.wrench.torque.z = 0.0;
internal_forces.assign(band.size(), wrench);
external_forces = internal_forces;
forces = internal_forces;
// TODO log timigs of planner
// instantiate variables for timing
// ros::Time time_stamp1, time_stamp2;
// ros::Duration duration;
// time_stamp1 = ros::Time::now();
// due to refinement band might change its size -> use while loop
int i = 1;
bool forward = true; // cycle 1xforwards and 1xbackwards through band
// 循环,对 band 路径带里的每个泡泡做操作
// 这个 while 循环条件切去了 band 头尾,即切去了当前点和目标点
// 这个循环先从前往后,到了后面有个条件再从后往前
// 即 当前点->目标点->当前点 为一次优化循环
ROS_INFO("bubble band.size(): %d.", band.size());
while ((i > 0) && (i < ((int)band.size() - 1))) {
ROS_DEBUG("Modifying bubble %d.", i);
#ifdef DEBUG_EBAND_
ROS_DEBUG("Calculating internal force for bubble %d.", i);
#endif
// 计算内力
if (!calcInternalForces(i, band, band.at(i), internal_forces.at(i))) {
// calculation of internal forces failed - stopping optimization
ROS_DEBUG("Calculation of internal forces failed");
return false;
}
#ifdef DEBUG_EBAND_
if (visualization_)
// publish internal forces
eband_visual_->publishForce("internal_forces", i, eband_visual_->blue,
internal_forces[i], band[i]);
// Log out debug info about next step
ROS_DEBUG("Calculating external force for bubble %d.", i);
#endif
// 计算斥力
// if(!calcExternalForces(i, band, external_forces))
if (!calcExternalForces(i, band.at(i), external_forces.at(i))) {
// calculation of External Forces failed - stopping optimization
ROS_DEBUG("Calculation of external forces failed");
return false;
}
#ifdef DEBUG_EBAND_
if (visualization_)
// publish external forces
eband_visual_->publishForce("external_forces", i, eband_visual_->red,
external_forces[i], band[i]);
// Log out debug info about next step
ROS_DEBUG("Superposing internal and external forces");
#endif
// sum up external and internal forces over all bubbles
forces.at(i).wrench.force.x = internal_forces.at(i).wrench.force.x +
external_forces.at(i).wrench.force.x;
forces.at(i).wrench.force.y = internal_forces.at(i).wrench.force.y +
external_forces.at(i).wrench.force.y;
forces.at(i).wrench.force.z = internal_forces.at(i).wrench.force.z +
external_forces.at(i).wrench.force.z;
forces.at(i).wrench.torque.x = internal_forces.at(i).wrench.torque.x +
external_forces.at(i).wrench.torque.x;
forces.at(i).wrench.torque.y = internal_forces.at(i).wrench.torque.y +
external_forces.at(i).wrench.torque.y;
forces.at(i).wrench.torque.z = internal_forces.at(i).wrench.torque.z +
external_forces.at(i).wrench.torque.z;
#ifdef DEBUG_EBAND_
ROS_DEBUG("Superpose forces: (x, y, theta) = (%f, %f, %f)",
forces.at(i).wrench.force.x, forces.at(i).wrench.force.y,
forces.at(i).wrench.torque.z);
ROS_DEBUG("Supressing tangential forces");
#endif
// 计算切向力
if (!suppressTangentialForces(i, band, forces.at(i))) {
// suppression of tangential forces failed
ROS_DEBUG("Supression of tangential forces failed");
return false;
}
#ifdef DEBUG_EBAND_
if (visualization_)
// publish resulting forces
eband_visual_->publishForce("resulting_forces", i, eband_visual_->green,
forces[i], band[i]);
#endif
// if (visualization_)
// // publish resulting forces
// eband_visual_->publishForce("resulting_forces", i, eband_visual_->red,
// forces[i], band[i]);
ROS_DEBUG("Applying forces to modify band");
// 把力作用于泡泡
if (!applyForces(i, band, forces)) {
// band invalid
ROS_DEBUG("Band is invalid - Stopping Modification");
return false;
}
#ifdef DEBUG_EBAND_
if (visualization_) {
// publish band with changed bubble at resulting position
eband_visual_->publishBand("bubbles", band);
ros::Duration(0.01).sleep();
}
#endif
// next bubble
if (forward) {
i++;
if (i == ((int)band.size() - 1)) {
// reached end of band - start backwards cycle until at start again -
// then stop
forward = false;
i--;
ROS_DEBUG("Optimization Elastic Band - Forward cycle done, starting "
"backward cycle");
}
} else {
i--;
}
}
return true;
}
calcInternalForces() 计算内力
论文中的内力计算公式

其中,
k
c
k_c
kc为全局收缩增益(contraction gain),是个参数,这个内力与前一个泡泡和下一个泡泡到当前泡泡的位姿差有关。
代码和这个一模一样。
bool EBandPlanner::calcInternalForces(int bubble_num, std::vector<Bubble> band,
Bubble curr_bubble,
geometry_msgs::WrenchStamped &forces) {
// check if plugin initialized
if (!initialized_) {
ROS_ERROR("This planner has not been initialized, please call initialize() "
"before using this planner");
return false;
}
// cycle over all bubbles except first and last (these are fixed)
if (band.size() <= 2) {
// nothing to do here -> we can stop right away - no forces calculated
return true;
}
// init tmp variables
double distance1, distance2;
geometry_msgs::Twist difference1, difference2;
geometry_msgs::Wrench wrench;
// make sure this method was called for a valid element in the forces or
// bubbles vector
ROS_ASSERT(bubble_num > 0);
ROS_ASSERT(bubble_num < ((int)band.size() - 1));
// get distance between bubbles
if (!calcBubbleDistance(curr_bubble.center.pose,
band[bubble_num - 1].center.pose, distance1)) {
ROS_ERROR("Failed to calculate Distance between two bubbles. Aborting "
"calculation of internal forces!");
return false;
}
if (!calcBubbleDistance(curr_bubble.center.pose,
band[bubble_num + 1].center.pose, distance2)) {
ROS_ERROR("Failed to calculate Distance between two bubbles. Aborting "
"calculation of internal forces!");
return false;
}
// get (elementwise) difference bewtween bubbles
if (!calcBubbleDifference(curr_bubble.center.pose,
band[bubble_num - 1].center.pose, difference1)) {
ROS_ERROR("Failed to calculate Difference between two bubbles. Aborting "
"calculation of internal forces!");
return false;
}
if (!calcBubbleDifference(curr_bubble.center.pose,
band[bubble_num + 1].center.pose, difference2)) {
ROS_ERROR("Failed to calculate Difference between two bubbles. Aborting "
"calculation of internal forces!");
return false;
}
// make sure to avoid division by (almost) zero during force calculation
// (avoid numerical problems)
// -> if difference/distance is (close to) zero then the force in this
// direction should be zero as well
if (distance1 <= tiny_bubble_distance_)
distance1 = 1000000.0;
if (distance2 <= tiny_bubble_distance_)
distance2 = 1000000.0;
// now calculate wrench - forces model an elastic band and are normed
// (distance) to render forces for small and large bubbles the same
// 与论文一致
// 力的 x y z 分量也即按照公式,计算 增益 x (与上一个泡泡的单位距离 + 与下一个泡泡的单位距离)
wrench.force.x = internal_force_gain_ * (difference1.linear.x / distance1 +
difference2.linear.x / distance2);
wrench.force.y = internal_force_gain_ * (difference1.linear.y / distance1 +
difference2.linear.y / distance2);
wrench.force.z = internal_force_gain_ * (difference1.linear.z / distance1 +
difference2.linear.z / distance2);
wrench.torque.x = internal_force_gain_ * (difference1.angular.x / distance1 +
difference2.angular.x / distance2);
wrench.torque.y = internal_force_gain_ * (difference1.angular.y / distance1 +
difference2.angular.y / distance2);
wrench.torque.z = internal_force_gain_ * (difference1.angular.z / distance1 +
difference2.angular.z / distance2);
#ifdef DEBUG_EBAND_
ROS_DEBUG("Calculating internal forces: (x, y, theta) = (%f, %f, %f)",
wrench.force.x, wrench.force.y, wrench.torque.z);
#endif
// store wrench in vector
forces.wrench = wrench;
return true;
}
calcExternalForces() 计算外力
复习论文:
外力由下式决定
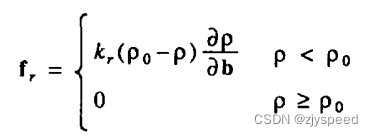
其中,
k
c
k_c
kc为全局斥力增益(repulsion gain),是个参数
∂
ρ
∂
b
frac{partial rho}{partial b}
∂b∂ρ 为泡泡半径关于泡泡中心位姿 b 的导数,由下式决定

其中, h h h 为步长,设置为 ρ ( b ) rho(b) ρ(b), 即当前位姿泡泡半径。
论文这样实现:

bool EBandPlanner::calcExternalForces(int bubble_num, Bubble curr_bubble,
geometry_msgs::WrenchStamped &forces) {
// check if plugin initialized
if (!initialized_) {
ROS_ERROR("This planner has not been initialized, please call initialize() "
"before using this planner");
return false;
}
// init tmp variables
double distance1, distance2;
geometry_msgs::Pose edge;
geometry_msgs::Pose2D edge_pose2D;
geometry_msgs::Wrench wrench;
// calculate delta-poses (on upper edge of bubble) for x-direction
edge = curr_bubble.center.pose;
// 中心往前走一个半径的距离,可以想像,泡泡是个圆,假设 x 方向指向上,
// 则中心往前走一个半径的距离到了泡泡的上边缘
// distance1 为泡泡的一个边缘到障碍物的距离
edge.position.x = edge.position.x + curr_bubble.expansion;
// get expansion on bubble at this point
if (!calcObstacleKinematicDistance(edge, distance1)) {
ROS_DEBUG("Bubble %d probably at edge of map - cannot retrieve distance "
"information to calculate external forces",
bubble_num);
// we cannot calculate external forces for this bubble - but still continue
// for the other bubbles
return true;
}
// calculate delta-poses (on lower edge of bubble) for x-direction
// 到了泡泡的下边缘
// distance2 为泡泡的另一个边缘到障碍物的距离
edge.position.x = edge.position.x - 2.0 * curr_bubble.expansion;
// get expansion on bubble at this point
if (!calcObstacleKinematicDistance(edge, distance2)) {
ROS_DEBUG("Bubble %d probably at edge of map - cannot retrieve distance "
"information to calculate external forces",
bubble_num);
// we cannot calculate external forces for this bubble - but still continue
// for the other bubbles
return true;
}
// calculate difference-quotient (approx. of derivative) in x-direction
if (curr_bubble.expansion <= tiny_bubble_expansion_) {
// avoid division by (almost) zero to avoid numerical problems
wrench.force.x = -external_force_gain_ * (distance2 - distance1) /
(2.0 * tiny_bubble_expansion_);
// actually we should never end up here - band should have been considered
// as broken
ROS_DEBUG("Calculating external forces on broken band. Bubble should have "
"been removed. Local Planner probably ill configured");
} else
wrench.force.x = -external_force_gain_ * (distance2 - distance1) /
(2.0 * curr_bubble.expansion);
// TODO above equations skip term to make forces continuous at end of
// influence region - test to add corresponding term
// calculate delta-poses (on upper edge of bubble) for y-direction
edge = curr_bubble.center.pose;
edge.position.y = edge.position.y + curr_bubble.expansion;
// get expansion on bubble at this point
if (!calcObstacleKinematicDistance(edge, distance1)) {
ROS_DEBUG("Bubble %d probably at edge of map - cannot retrieve distance "
"information to calculate external forces",
bubble_num);
// we cannot calculate external forces for this bubble - but still continue
// for the other bubbles
return true;
}
// calculate delta-poses (on lower edge of bubble) for x-direction
edge.position.y = edge.position.y - 2.0 * curr_bubble.expansion;
// get expansion on bubble at this point
if (!calcObstacleKinematicDistance(edge, distance2)) {
ROS_DEBUG("Bubble %d probably at edge of map - cannot retrieve distance "
"information to calculate external forces",
bubble_num);
// we cannot calculate external forces for this bubble - but still continue
// for the other bubbles
return true;
}
// calculate difference-quotient (approx. of derivative) in x-direction
if (curr_bubble.expansion <= tiny_bubble_expansion_) {
// avoid division by (almost) zero to avoid numerical problems
wrench.force.y = -external_force_gain_ * (distance2 - distance1) /
(2.0 * tiny_bubble_expansion_);
// actually we should never end up here - band should have been considered
// as broken
ROS_DEBUG("Calculating external forces on broken band. Bubble should have "
"been removed. Local Planner probably ill configured");
} else
wrench.force.y = -external_force_gain_ * (distance2 - distance1) /
(2.0 * curr_bubble.expansion);
// TODO above equations skip term to make forces continuous at end of
// influence region - test to add corresponsing term
// no force in z-direction
wrench.force.z = 0.0;
// no torque around x and y axis
wrench.torque.x = 0.0;
wrench.torque.y = 0.0;
// calculate delta-poses (on upper edge of bubble) for x-direction
PoseToPose2D(curr_bubble.center.pose, edge_pose2D);
edge_pose2D.theta =
edge_pose2D.theta +
(curr_bubble.expansion / getCircumscribedRadius(*costmap_ros_));
edge_pose2D.theta = angles::normalize_angle(edge_pose2D.theta);
PoseToPose2D(edge, edge_pose2D);
// get expansion on bubble at this point
if (!calcObstacleKinematicDistance(edge, distance1)) {
ROS_DEBUG("Bubble %d probably at edge of map - cannot retrieve distance "
"information to calculate external forces",
bubble_num);
// we cannot calculate external forces for this bubble - but still continue
// for the other bubbles
return true;
}
// calculate delta-poses (on lower edge of bubble) for x-direction
edge_pose2D.theta =
edge_pose2D.theta -
2.0 * (curr_bubble.expansion / getCircumscribedRadius(*costmap_ros_));
edge_pose2D.theta = angles::normalize_angle(edge_pose2D.theta);
PoseToPose2D(edge, edge_pose2D);
// get expansion on bubble at this point
if (!calcObstacleKinematicDistance(edge, distance2)) {
ROS_DEBUG("Bubble %d probably at edge of map - cannot retrieve distance "
"information to calculate external forces",
bubble_num);
// we cannot calculate external forces for this bubble - but still continue
// for the other bubbles
return true;
}
// calculate difference-quotient (approx. of derivative) in x-direction
if (curr_bubble.expansion <= tiny_bubble_expansion_) {
// avoid division by (almost) zero to avoid numerical problems
wrench.torque.z = -external_force_gain_ * (distance2 - distance1) /
(2.0 * tiny_bubble_expansion_);
// actually we should never end up here - band should have been considered
// as broken
ROS_DEBUG("Calculating external forces on broken band. Bubble should have "
"been removed. Local Planner probably ill configured");
} else
wrench.torque.z = -external_force_gain_ * (distance2 - distance1) /
(2.0 * curr_bubble.expansion);
// TODO above equations skip term to make forces continuous at end of
// influence region - test to add corresponsing term
#ifdef DEBUG_EBAND_
ROS_DEBUG("Calculating external forces: (x, y, theta) = (%f, %f, %f)",
wrench.force.x, wrench.force.y, wrench.torque.z);
#endif
// assign wrench to forces vector
forces.wrench = wrench;
return true;
}
suppressTangentialForces() 移除切向力
和论文一样

bool EBandPlanner::suppressTangentialForces(
int bubble_num, std::vector<Bubble> band,
geometry_msgs::WrenchStamped &forces) {
// cycle over all bubbles except first and last (these are fixed)
if (band.size() <= 2) {
// nothing to do here -> we can stop right away - no forces calculated
return true;
}
double scalar_fd, scalar_dd;
geometry_msgs::Twist difference;
// make sure this method was called for a valid element in the forces or
// bubbles vector
ROS_ASSERT(bubble_num > 0);
ROS_ASSERT(bubble_num < ((int)band.size() - 1));
// get pose-difference from following to preceding bubble -> "direction of the
// band in this bubble"
if (!calcBubbleDifference(band[bubble_num + 1].center.pose,
band[bubble_num - 1].center.pose, difference))
return false;
// "project wrench" in middle bubble onto connecting vector
// scalar wrench*difference
scalar_fd = forces.wrench.force.x * difference.linear.x +
forces.wrench.force.y * difference.linear.y +
forces.wrench.force.z * difference.linear.z +
forces.wrench.torque.x * difference.angular.x +
forces.wrench.torque.y * difference.angular.y +
forces.wrench.torque.z * difference.angular.z;
// abs of difference-vector: scalar difference*difference
scalar_dd = difference.linear.x * difference.linear.x +
difference.linear.y * difference.linear.y +
difference.linear.z * difference.linear.z +
difference.angular.x * difference.angular.x +
difference.angular.y * difference.angular.y +
difference.angular.z * difference.angular.z;
// avoid division by (almost) zero -> check if bubbles have (almost) same
// center-pose
if (scalar_dd <= tiny_bubble_distance_) {
// there are redundant bubbles, this should normally not hapen -> probably
// error in band refinement
ROS_DEBUG(
"Calculating tangential forces for redundant bubbles. Bubble should "
"have been removed. Local Planner probably ill configured");
}
// calculate orthogonal components
forces.wrench.force.x =
forces.wrench.force.x - scalar_fd / scalar_dd * difference.linear.x;
forces.wrench.force.y =
forces.wrench.force.y - scalar_fd / scalar_dd * difference.linear.y;
forces.wrench.force.z =
forces.wrench.force.z - scalar_fd / scalar_dd * difference.linear.z;
forces.wrench.torque.x =
forces.wrench.torque.x - scalar_fd / scalar_dd * difference.angular.x;
forces.wrench.torque.y =
forces.wrench.torque.y - scalar_fd / scalar_dd * difference.angular.y;
forces.wrench.torque.z =
forces.wrench.torque.z - scalar_fd / scalar_dd * difference.angular.z;
#ifdef DEBUG_EBAND_
ROS_DEBUG("Supressing tangential forces: (x, y, theta) = (%f, %f, %f)",
forces.wrench.force.x, forces.wrench.force.y,
forces.wrench.torque.z);
#endif
return true;
}
applyForces()
计算完三个力之后,将计算出的力作用于泡泡上,优化弹力带

bool EBandPlanner::applyForces(
int bubble_num, std::vector<Bubble> &band,
std::vector<geometry_msgs::WrenchStamped> forces) {
// cycle over all bubbles except first and last (these are fixed)
if (band.size() <= 2) {
// nothing to do here -> we can stop right away - no forces calculated
return true;
}
geometry_msgs::Pose2D bubble_pose2D, new_bubble_pose2D;
geometry_msgs::Pose bubble_pose, new_bubble_pose;
geometry_msgs::Twist bubble_jump;
Bubble new_bubble = band.at(bubble_num);
double distance;
// move bubble
bubble_pose = band.at(bubble_num).center.pose;
PoseToPose2D(bubble_pose, bubble_pose2D);
// move according to bubble_new = bubble_old + alpha*force -> we choose alpha
// to be the current expansion of the modified bubble
//改变泡泡,往外推
// 就是根据之前计算出的力,将未经优化的路径进行优化,优化的结果的改变位置的方向
bubble_jump.linear.x =
band.at(bubble_num).expansion * forces.at(bubble_num).wrench.force.x;
bubble_jump.linear.y =
band.at(bubble_num).expansion * forces.at(bubble_num).wrench.force.y;
bubble_jump.linear.z = 0.0;
bubble_jump.angular.x = 0.0;
bubble_jump.angular.y = 0.0;
// 扭矩对转向的作用
bubble_jump.angular.z = band.at(bubble_num).expansion /
getCircumscribedRadius(*costmap_ros_) *
forces.at(bubble_num).wrench.torque.z;
bubble_jump.angular.z = angles::normalize_angle(bubble_jump.angular.z);
// apply changes to calc tmp bubble position
new_bubble_pose2D.x = bubble_pose2D.x + bubble_jump.linear.x;
new_bubble_pose2D.y = bubble_pose2D.y + bubble_jump.linear.y;
new_bubble_pose2D.theta = bubble_pose2D.theta + bubble_jump.angular.z;
new_bubble_pose2D.theta = angles::normalize_angle(new_bubble_pose2D.theta);
// apply changes to local copy
Pose2DToPose(new_bubble_pose, new_bubble_pose2D);
new_bubble.center.pose = new_bubble_pose;
#ifdef DEBUG_EBAND_
ROS_DEBUG("Try moving bubble %d at (%f, %f, %f) by (%f, %f, %f).", bubble_num,
bubble_pose2D.x, bubble_pose2D.y, bubble_pose2D.theta,
bubble_jump.linear.x, bubble_jump.linear.y, bubble_jump.angular.z);
#endif
// check validity of moved bubble
// recalc expansion of bubble -> calc Size of Bubbles by calculating Dist to
// nearest Obstacle [depends kinematic, environment]
if (!calcObstacleKinematicDistance(new_bubble_pose, distance)) {
ROS_DEBUG("Calculation of Distance failed. Frame %d of %d Probably outside "
"map. Discarding Changes",
bubble_num, ((int)band.size()));
#ifdef DEBUG_EBAND_
if (visualization_)
eband_visual_->publishBubble("bubble_hypo", bubble_num,
eband_visual_->red, new_bubble);
#endif
// this bubble must not be changed, but band is still valid -> continue with
// other bubbles
return true;
}
if (distance <= tiny_bubble_expansion_) {
// frame must not be immediately in collision -> otherwise calculation of
// gradient will later be invalid
ROS_DEBUG("Calculation of Distance failed. Frame %d of %d in collision. "
"Plan invalid. Discarding Changes",
bubble_num, ((int)band.size()));
#ifdef DEBUG_EBAND_
if (visualization_)
eband_visual_->publishBubble("bubble_hypo", bubble_num,
eband_visual_->red, new_bubble);
#endif
// this bubble must not be changed, but band is still valid -> continue with
// other bubbles
return true;
}
// so far o.k. -> assign distance to new bubble
new_bubble.expansion = distance;
// check whether step was reasonable
geometry_msgs::WrenchStamped new_bubble_force = forces.at(bubble_num);
// check whether we get a valid force calculation here
if (!getForcesAt(bubble_num, band, new_bubble, new_bubble_force)) {
// error during calculation of forces for the new position - discard changes
ROS_DEBUG("Cannot calculate forces on bubble %d at new position - "
"discarding changes",
bubble_num);
return true;
}
#ifdef DEBUG_EBAND_
ROS_DEBUG("Check for zero-crossings in force on bubble %d", bubble_num);
#endif
// check for zero-crossings in the force-vector
double checksum_zero, abs_new_force, abs_old_force;
// project force-vectors onto each other
checksum_zero =
(new_bubble_force.wrench.force.x * forces.at(bubble_num).wrench.force.x) +
(new_bubble_force.wrench.force.y * forces.at(bubble_num).wrench.force.y) +
(new_bubble_force.wrench.torque.z *
forces.at(bubble_num).wrench.torque.z);
// if sign changes and ...
if (checksum_zero < 0.0) {
ROS_DEBUG("Detected zero-crossings in force on bubble %d. Checking total "
"change in force.",
bubble_num);
// check the absolute values of the two vectors
abs_new_force = sqrt(
(new_bubble_force.wrench.force.x * new_bubble_force.wrench.force.x) +
(new_bubble_force.wrench.force.y * new_bubble_force.wrench.force.y) +
(new_bubble_force.wrench.torque.z * new_bubble_force.wrench.torque.z));
abs_old_force = sqrt((forces.at(bubble_num).wrench.force.x *
forces.at(bubble_num).wrench.force.x) +
(forces.at(bubble_num).wrench.force.x *
forces.at(bubble_num).wrench.force.x) +
(forces.at(bubble_num).wrench.torque.z *
forces.at(bubble_num).wrench.torque.z));
// force still has a significant high value (> ~75% of old force by default)
if ((abs_new_force > equilibrium_relative_overshoot_ * abs_old_force) &&
(abs_new_force > significant_force_)) {
ROS_DEBUG("Detected significante change in force (%f to %f) on bubble "
"%d. Entering Recursive Approximation.",
abs_old_force, abs_new_force, bubble_num);
// o.k. now we really have to take a closer look -> start recursive
// approximation to equilibrium-point
int curr_recursion_depth = 0;
geometry_msgs::Twist new_step_width;
Bubble curr_bubble = band.at(bubble_num);
geometry_msgs::WrenchStamped curr_bubble_force = forces.at(bubble_num);
// half step size
new_step_width.linear.x = 0.5 * bubble_jump.linear.x;
new_step_width.linear.y = 0.5 * bubble_jump.linear.y;
new_step_width.linear.z = 0.5 * bubble_jump.linear.z;
new_step_width.angular.x = 0.5 * bubble_jump.angular.x;
new_step_width.angular.y = 0.5 * bubble_jump.angular.y;
new_step_width.angular.z = 0.5 * bubble_jump.angular.z;
// one step deeper into the recursion
if (moveApproximateEquilibrium(bubble_num, band, curr_bubble,
curr_bubble_force, new_step_width,
curr_recursion_depth)) {
// done with recursion - change bubble and hand it back
ROS_INFO("�33[1;33mdeeper changed new bubble�33[0m");
new_bubble = curr_bubble;
#ifdef DEBUG_EBAND_
geometry_msgs::Pose2D curr_bubble_pose2D;
PoseToPose2D(curr_bubble.center.pose, curr_bubble_pose2D);
ROS_DEBUG("Instead - Try moving bubble %d at (%f, %f, %f) by (%f, %f, "
"%f) to (%f, %f, %f).",
bubble_num, bubble_pose2D.x, bubble_pose2D.y,
bubble_pose2D.theta, new_step_width.linear.x,
new_step_width.linear.y, new_step_width.angular.z,
curr_bubble_pose2D.x, curr_bubble_pose2D.y,
curr_bubble_pose2D.theta);
#endif
}
}
}
// check validity of resulting band (given the moved bubble)
// TODO use this routine not only to check whether gap can be filled but also
// to fill gap (if possible) get local copy of band, set new position of moved
// bubble and init iterators
std::vector<Bubble> tmp_band = band;
std::vector<Bubble>::iterator start_iter, end_iter;
tmp_band.at(bubble_num) = new_bubble;
start_iter = tmp_band.begin();
// check left connection (bubble and bubble-1)
start_iter = start_iter + bubble_num - 1;
end_iter = start_iter + 1;
// check Overlap - if bubbles do not overlap try to fill gap
if (!checkOverlap(*start_iter, *end_iter)) {
if (!fillGap(tmp_band, start_iter, end_iter)) {
ROS_DEBUG("Bubble at new position cannot be connected to neighbour. "
"Discarding changes.");
// this bubble must not be changed, but band is still valid -> continue
// with other bubbles
return true;
}
}
// get fresh copy of band, set new position of bubble again and reinit
// iterators
tmp_band = band;
tmp_band.at(bubble_num) = new_bubble;
start_iter = tmp_band.begin();
// check right connection (bubble and bubble +1)
start_iter = start_iter + bubble_num;
end_iter = start_iter + 1;
// check Overlap - if bubbles do not overlap try to fill gap
if (!checkOverlap(*start_iter, *end_iter)) {
if (!fillGap(tmp_band, start_iter, end_iter)) {
ROS_DEBUG("Bubble at new position cannot be connected to neighbour. "
"Discarding changes.");
// this bubble must not be changed, but band is still valid -> continue
// with other bubbles
return true;
}
}
// check successful - bubble and band valid apply changes
#ifdef DEBUG_EBAND_
ROS_DEBUG("Frame %d of %d: Check successful - bubble and band valid. "
"Applying Changes",
bubble_num, ((int)band.size()));
#endif
return true;
}
结语
eband 系列解析到这里差不多就结束了,个人感觉 eband 规划器代码的逻辑非常清晰,作者的注释也非常详细,大家有空的话值得研究一下。
大家也可以发现,相比于 dwa,teb 等等规划器, eband 的参数是非常少的,这也减轻了大家调参的负担,稍微调一调基本上就可以得到比较好的结果。如果使用全向底盘,推荐大家试试。
最后
以上就是爱笑毛巾最近收集整理的关于eband_local_planner源码解析(7)eband_local_planner.h/cpp 解读eband_->setplan()eband_->optimizeBand()结语的全部内容,更多相关eband_local_planner源码解析(7)eband_local_planner.h/cpp内容请搜索靠谱客的其他文章。








发表评论 取消回复