有时候在建完Simulink仿真模型之后,调试参数是是非常麻烦的,特别是对于PID参数的调试,在这里为了方便,我们可以使用MATLAB中自带的PID Tuner App工具箱进行参数的自整定。
在MATLAB的命令窗口中输入以下命令:
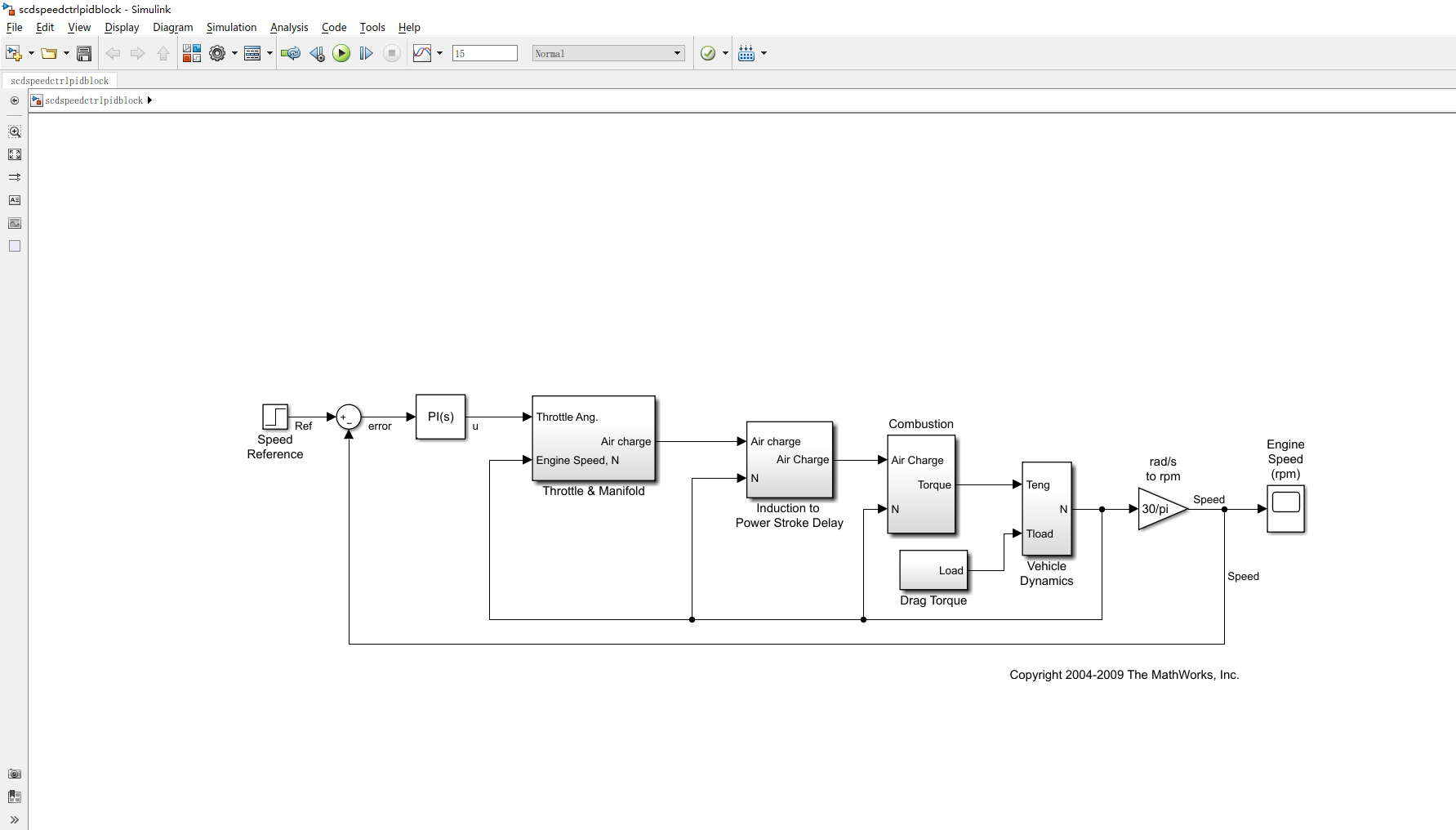
open_system('scdspeedctrlpidblock')可以打开一个这样的模型,如图所示:
打开模型中的PID模块,如图所示:
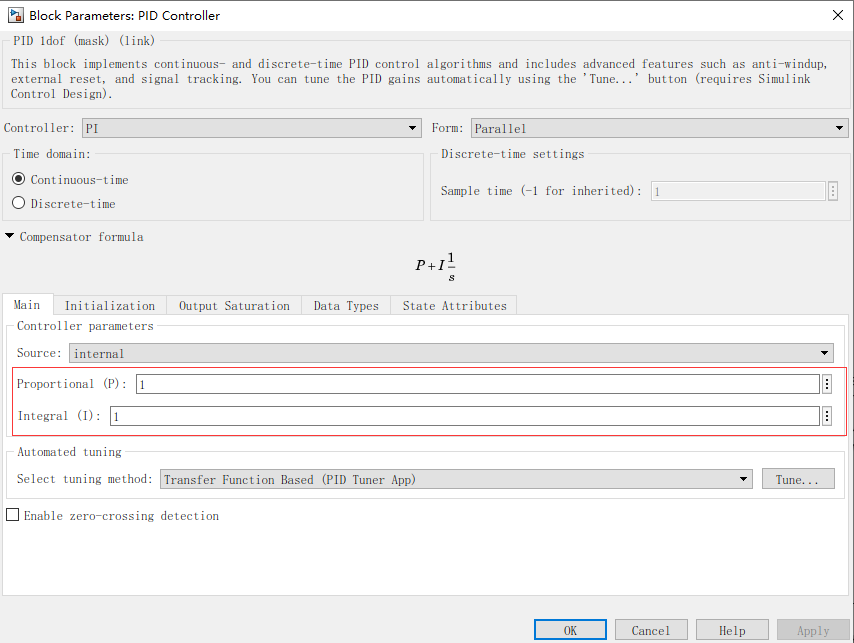
此时的比例、积分参数都是默认的为1,点击Simulink仿真运行按钮,观察输出波形,如图所示:
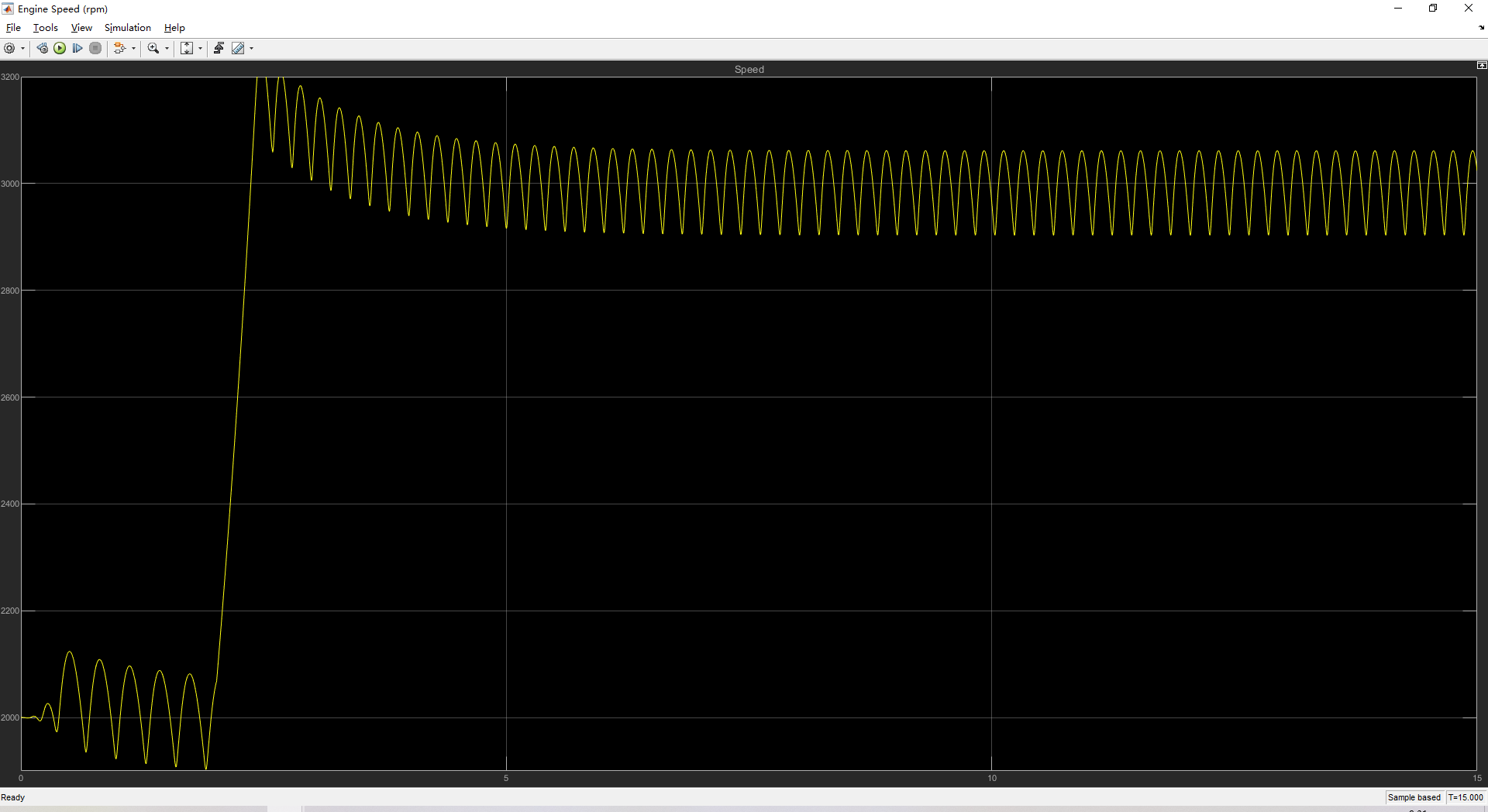
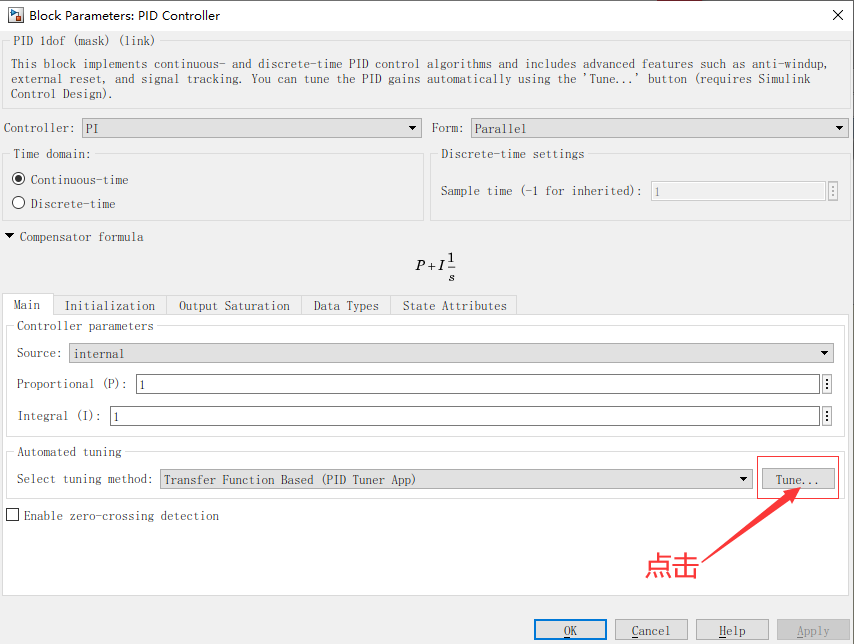
此时的波形就比较的振荡,不满足控制的要求,需药调节PID的控制参数,如果手动进行调节,需要花费大量的时间,有可能调节的参数不是最好的。这是可以使用PID Tuner App进行PI参数的自行调整。双击PID模块,点击Tune......,如图所示:
弹出PID Tuner App,如图所示:
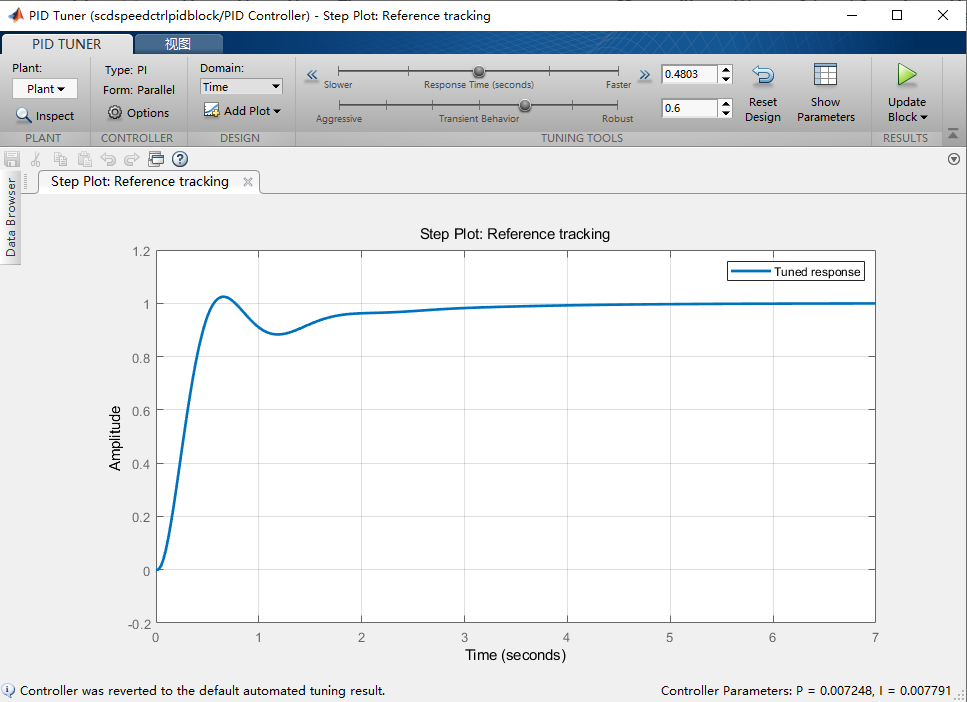
此时的参数已经默认调试完成,点击 Show parameters 来显示控制参数P和I以及一系列控制性能和健壮性的度量指标。
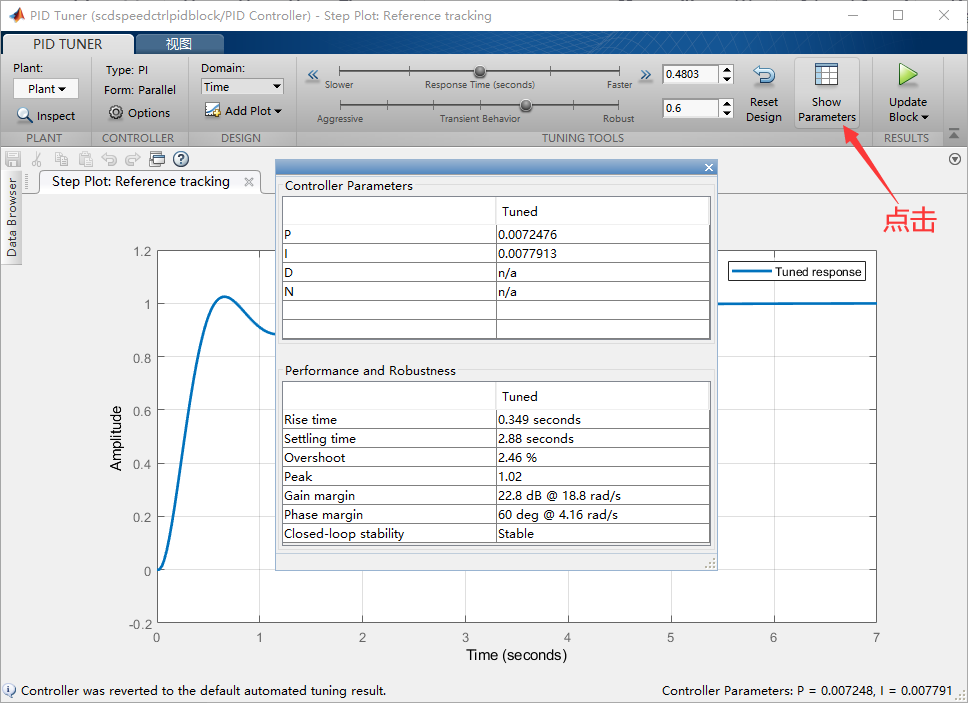
在这个例子中,初始PI控制器的过渡时间为2秒,满足设计要求。
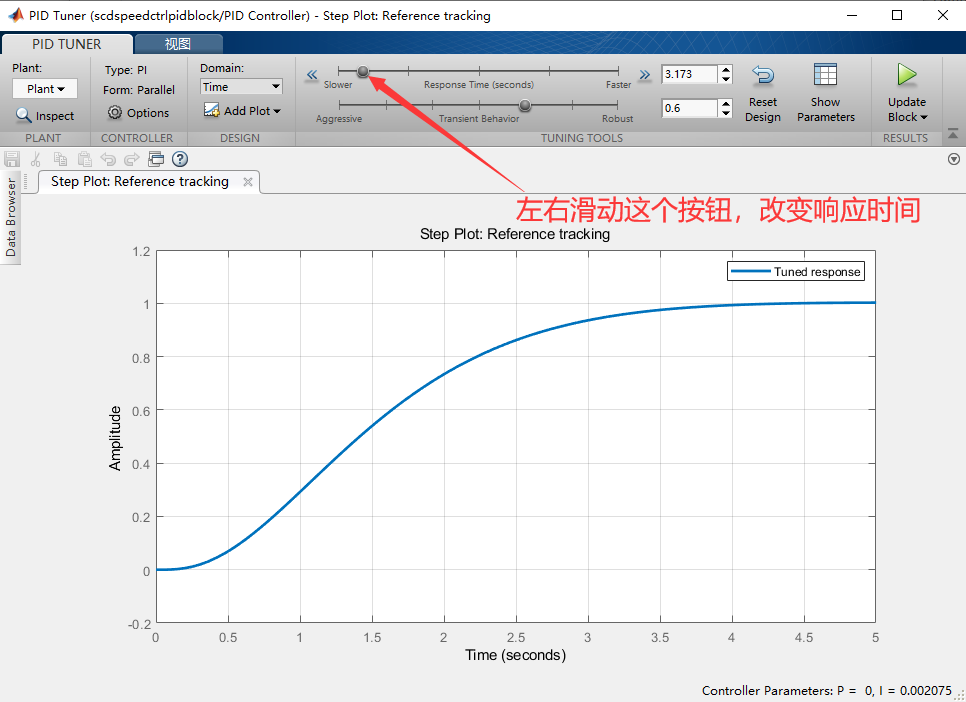
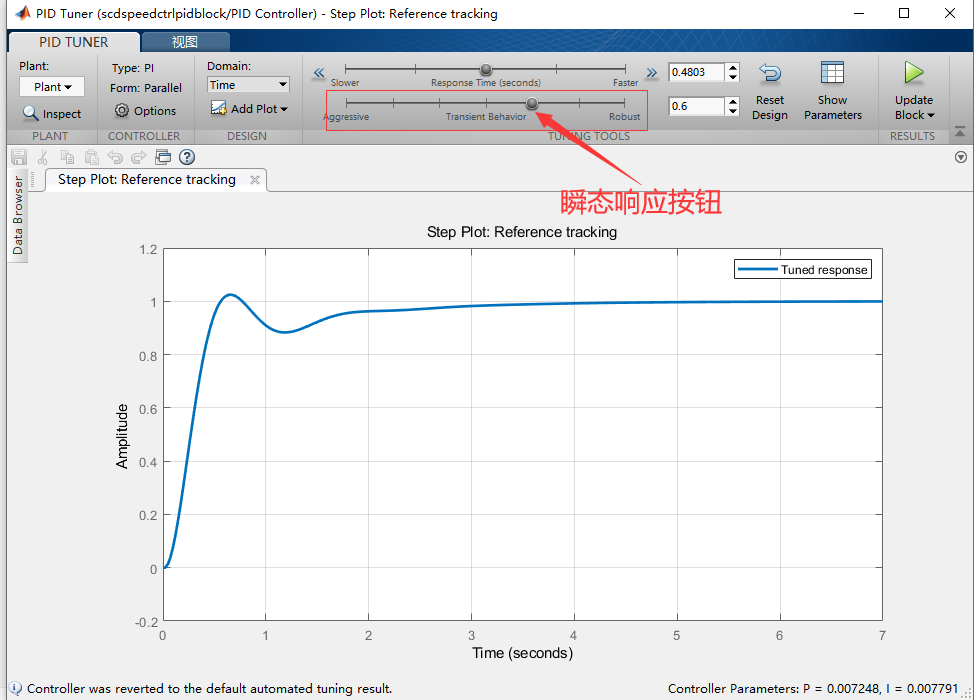
参考信号跟踪响应的超调大概为2.5%。因为在满足过渡时间要求的前提下还有一些余量,我们可以通过增加响应时间来减小超调。向左移动响应时间滑块来增加闭环系统的响应时间。注意在调整响应时间的时候,响应曲线和控制器参数以及性能指标也在不断更新。如图所示:
点击参数显示,如图所示:
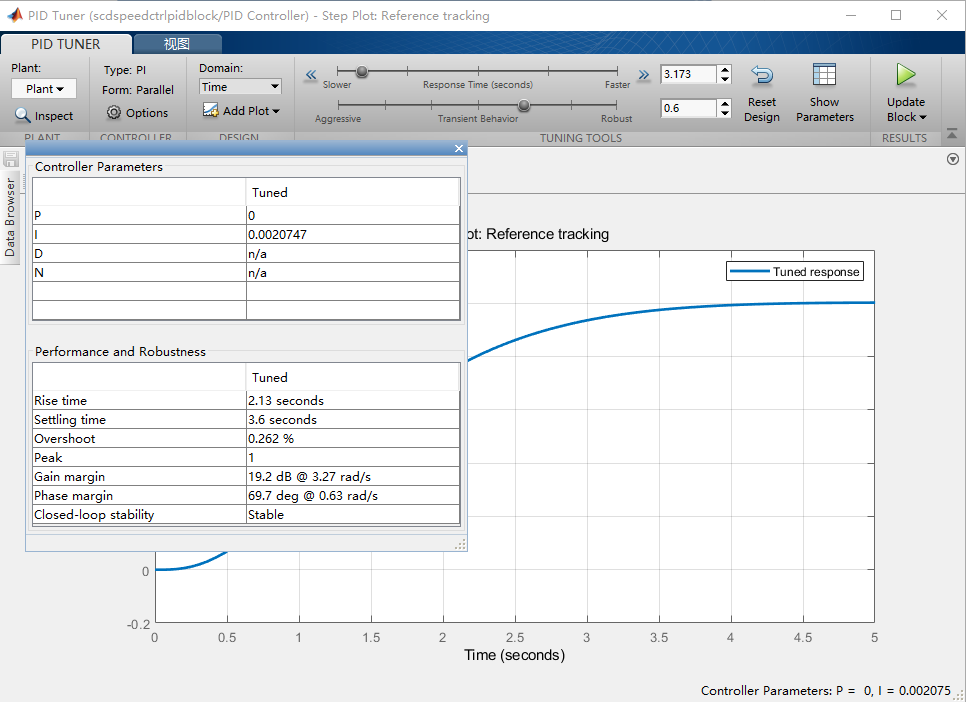
为了在过渡时间小于2秒的情况下实现零超调,需要同时调节响应时间和瞬态特性滑块。我们需要控制器的响应更快以缩短过渡时间,增加控制器的瞬态性来减小超调,可以调剂瞬态滑动模块按钮,如图所示:
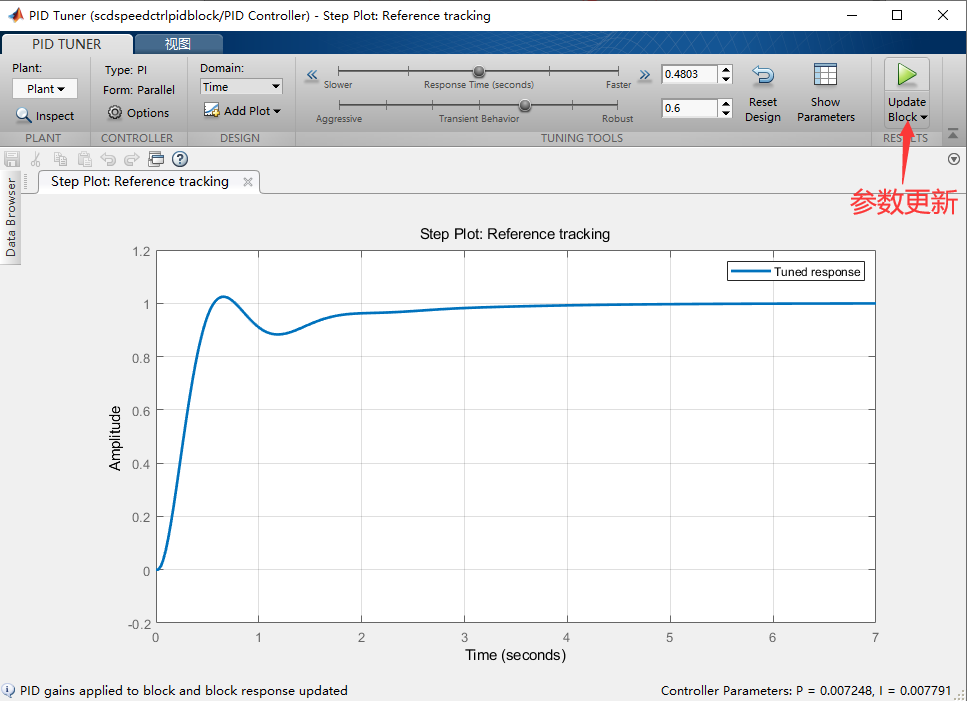
在经过线性近似的装置模型上得到性能满意的控制器之后,还需要在原来的非线性装置上进行检验。在PID Tuner中点击Update Block按钮,把调好的参数写入Simulink模型中的PID控制器。点击Update Block按钮,如图所示:
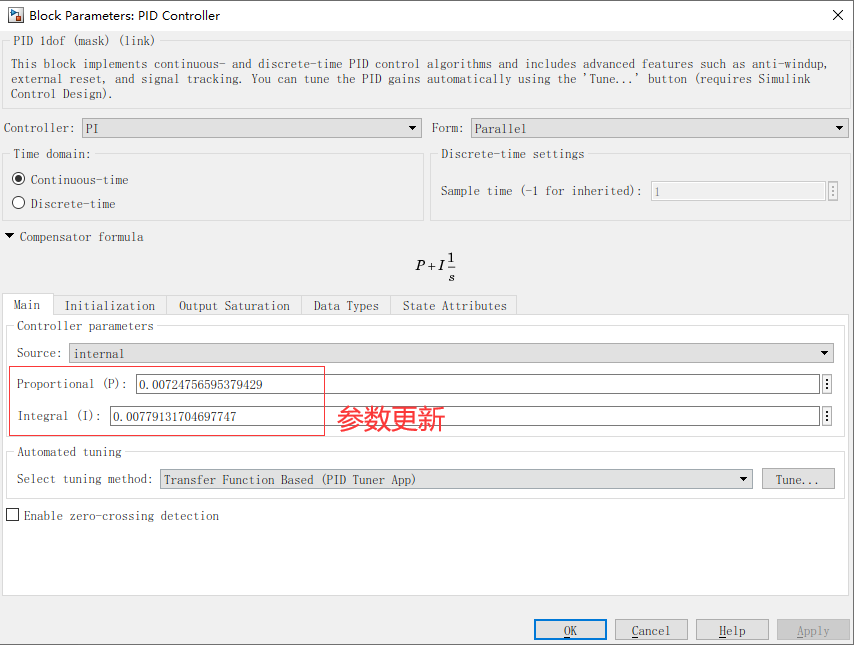
这样PI参数就更新到PID模块中了,如图所示:
重新运行仿真模块,观察速度波形,如图所示:
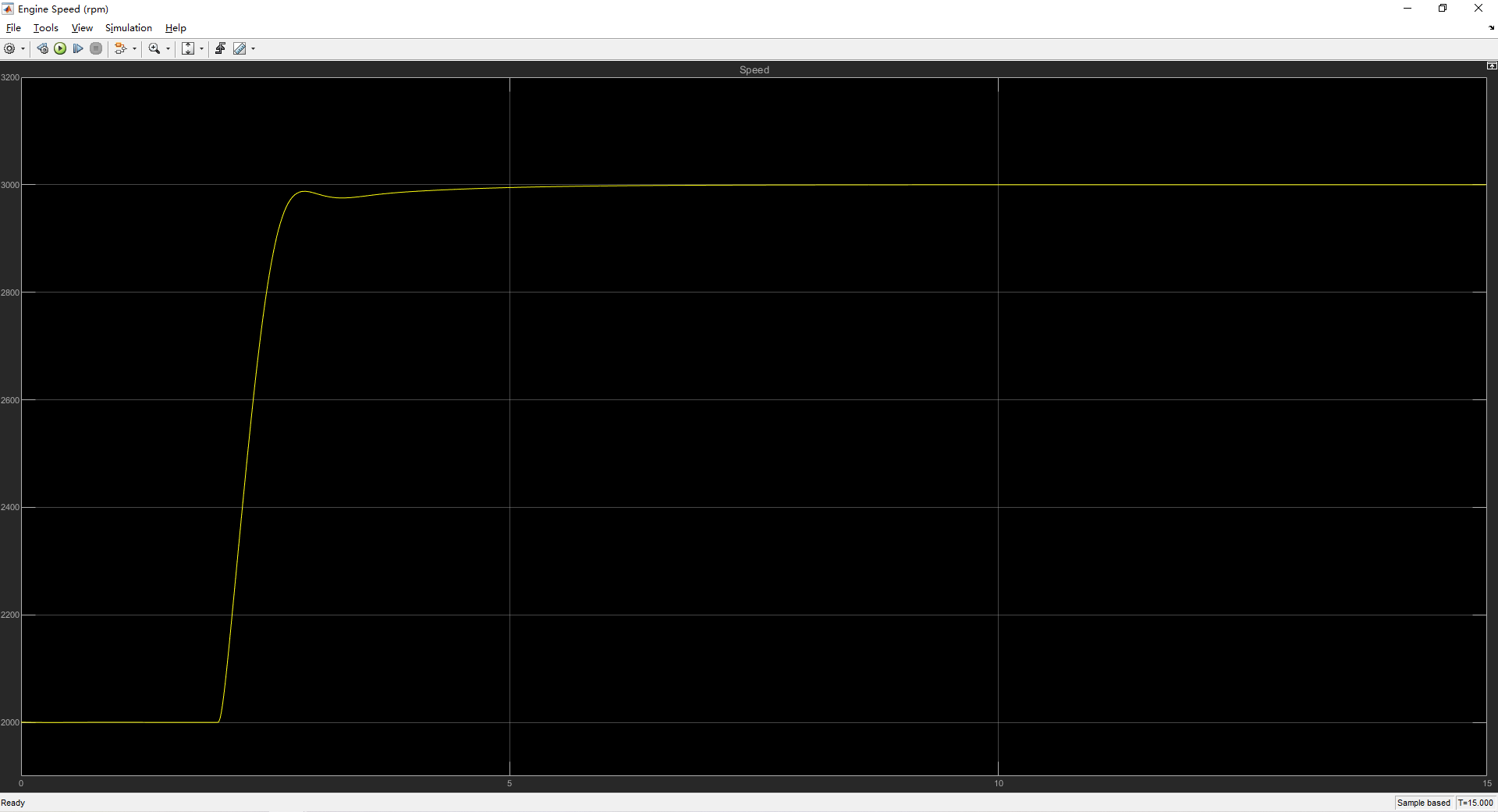
此时的速度波形比刚开始的就好很多了,如果对波形还是不满意,可以轻微调试参数即可。
最后
以上就是安详棒棒糖最近收集整理的关于在Simulink中使用PID Tuner 进行 PID 参数调试的全部内容,更多相关在Simulink中使用PID内容请搜索靠谱客的其他文章。






![怎么暂停matlab仿真,[原创]不要s函数,GUI控制simulink,开始、停止与实时更新](https://www.shuijiaxian.com/files_image/reation/bcimg15.png)

发表评论 取消回复