作者 | Malignus 编辑 | 汽车人
原文链接:https://zhuanlan.zhihu.com/p/548375167
点击下方卡片,关注“自动驾驶之心”公众号
ADAS巨卷干货,即可获取
1Motivation
对于下游的归控任务,下面的两种表述哪个更好呢:直行500m后左拐;直行到第二个十字路口左拐。作者认为肯定是后者更好,那么路口这种情况就得好好建模了,这种场景有啥难题呢,作者给了个图:
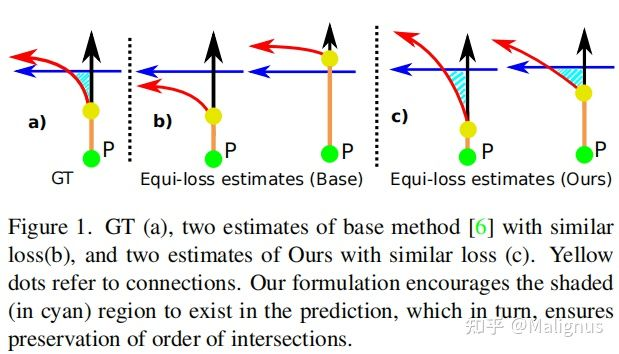
我对这张图的理解是这样的,假定自车位于绿点P,面前来到了一个十字路口。其中由东向西方向有两条车道,蓝色表示的由东向西最贴近下方的车道。那么我们要预测从P点出发,左拐到东向西的第二条车道上。若预测的车道为b)左边,biaji就撞上了由西向东的车辆。若预测的车道为b)右边,不好意思,违反交规,等着罚款扣分吧。那么对于这种情况,如果我们看线的LIoU或者其他的指标,可能c)这种情况指标还低一些,那这种拓扑关系其实就没有被捕捉到。那要咋办呢~看后文~
2Method
车道图表示
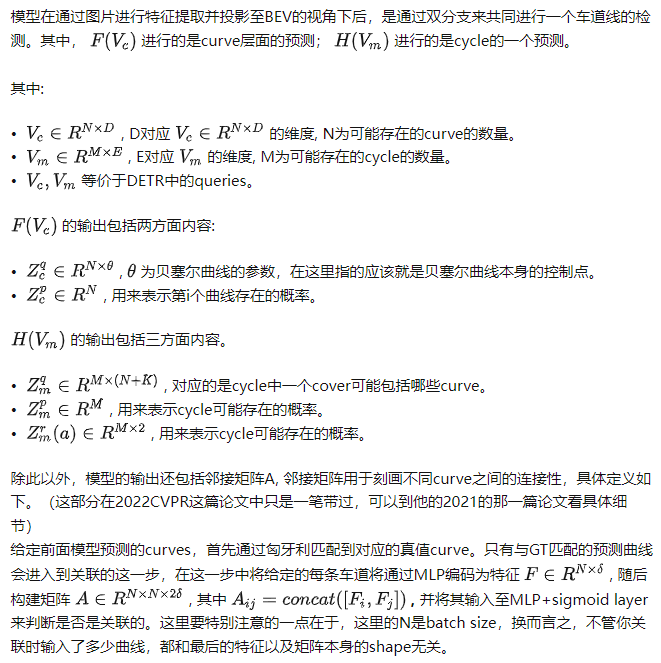
本文中车道图的定义与前作思路一致,即使用有向图进行局部路网的表征。定义有向图G(V, E), 其中图的顶点V指的是车道中心线切片(lane centerline segment)。图的边用来刻画车道中心线切片之间的连接关系,后续我们将用curve/lane centerline等方式来表述这个车道中心线,希望读者不要混淆。具体来讲,使用关联矩阵A作为图G(V, E)连接性的表示。当且仅当y的起始点与x的终点相同时,可以构建图中顶点x, y的一条边( (x, y) ∈ E)。其中,车道中心线使用贝塞尔曲线进行建模。
拓扑表示
前面讲了作者整个论文的动机,那么为了更好地把这个东西表示好,就提出了这样的一个拓扑表示。具体来说,如果知道所有intersection point的一个order,然后在学曲线的基础之上,学这个Intersection point的顺序就行了。可是这个顺序很难把他formulate, 作者就把他拆解成两个问题:首先知道curve间的intersection order 随后对于交汇的情况,构建最小闭合子图,用minimal covers来描述这个最小闭合子图。这里的minimal covers,就是这个子图具体包括了哪些curve。由于curve本身带顺序,那用这两个内容,就可以表示这样的Intersection point了~
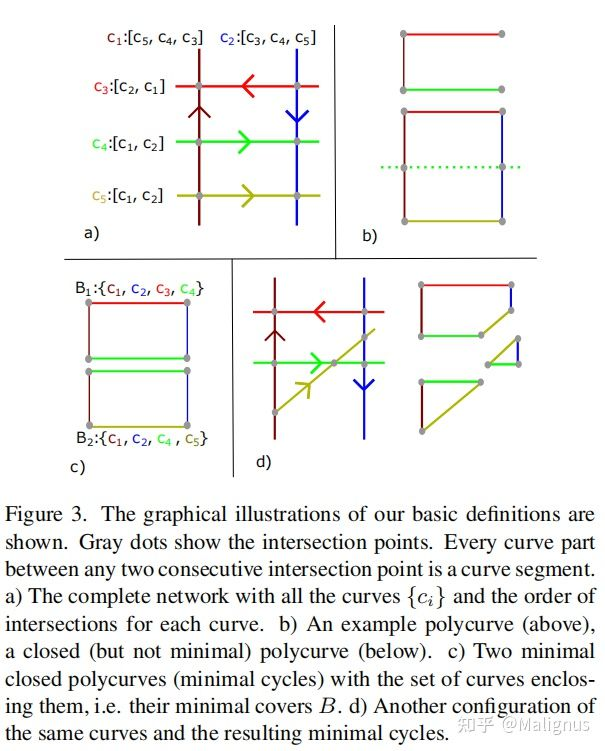
上面的这张图算是一个简单的详解。
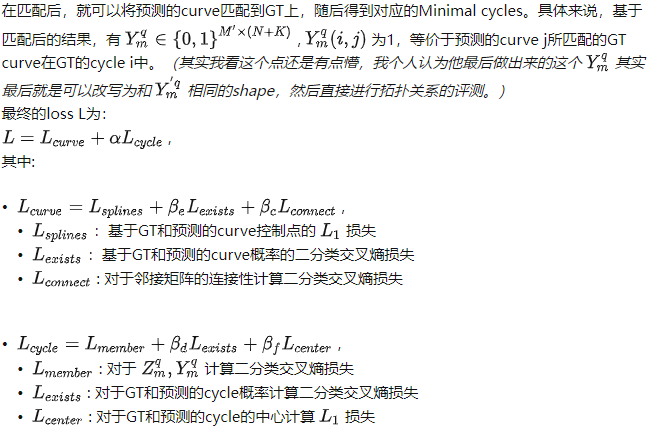
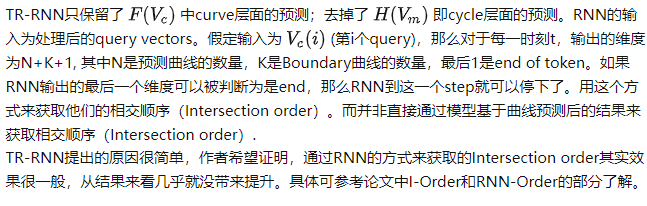
模型输出
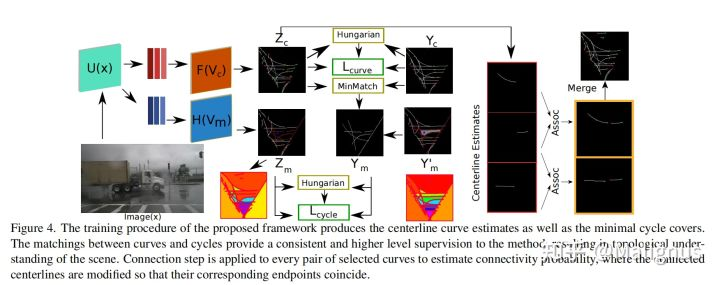
模型框架
具体网络结构
该论文通过两种不同的网络结构来验证这套formulation的可行性,一套transformer-based,一套Polygon-RNN-based。
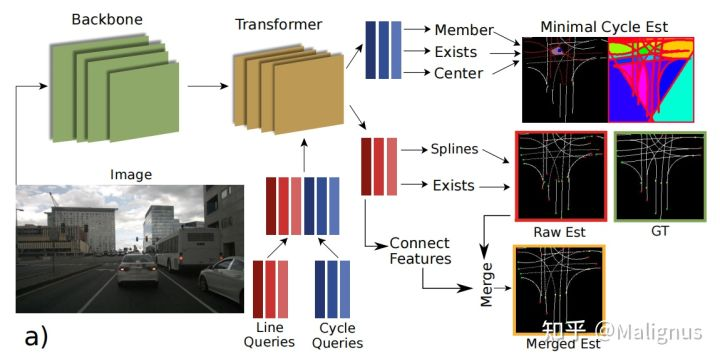
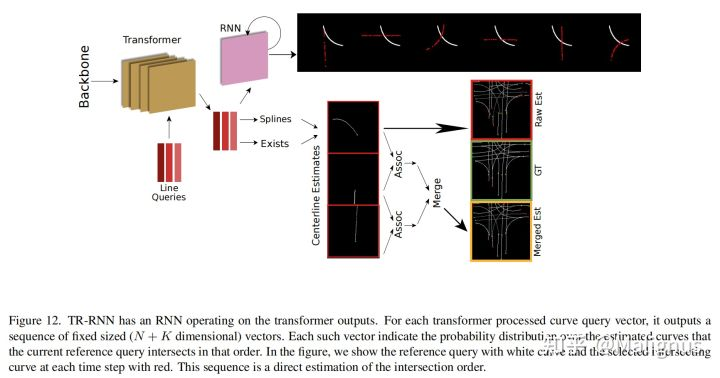
其实就是大家很熟悉的DETR那一套的思路。作者提出的方法名为Ours/TR,配合图和上半部分的内容其实已经可以很清楚的get到具体的细节了。作者在这个基础之上还提出了另一个baseline,叫TR-RNN:
3Evaluation
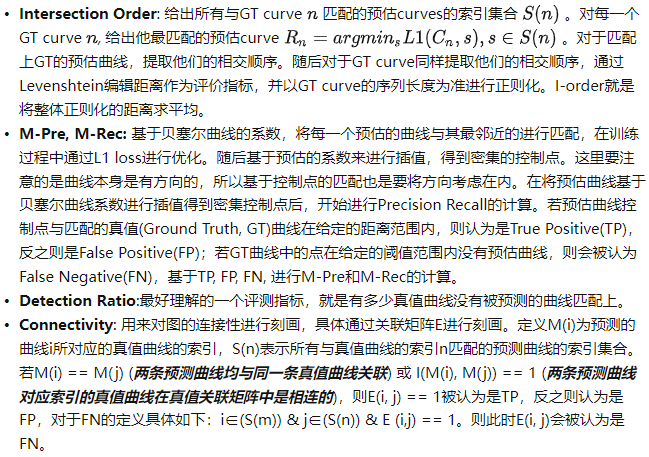
模型总共提出了以下几种评测方式,其中M-F-Score, Detection ratio与Connectivity这三个方法为前作提出,在这里统一进行一轮介绍:
Minimal-Cycle Minimal Cover(B):(下面的三个方法主要对minimal-cycle/拓扑关系进行评测)
MC-F:基于estimate curves的minimal cycles将通过min-matching将其转化为基于GT curves的minimal cycles。随后,这些cycles将通过匈牙利匹配计算其与GT minimal cycles的TP, TN, FP. 得到对应的评价指标。
H-GT-F:与MC-F的求解思路类似,基于estimate curves的minimal cycles将通过min-matching将其转化为基于GT curves的minimal cycles,随后通过前文计算的阈值,对cycle中cover所包括的边进行进一步约束。随后基于得到的cycles,我们基于阈值来进行进一步的对cycle的筛选,并通过匈牙利匹配来计算得到评测指标。H-GT-F评价的是minimal cycle网络基于GT的minimal cycle去预测GT拓扑结构的能力。
H-EST-F:这里去掉了estimated curves到GT curves的min-matching操作,预测什么直接匈牙利算法去作匹配。
4Results
nuScenes & Argoverse
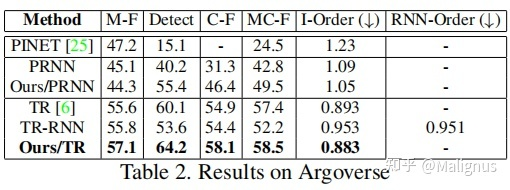
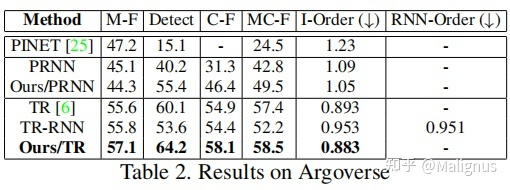 整体感受:
整体感受:
拓扑结构的引入没有带来对曲线检测本身指标的提升;
polygon-rnn那套效果非常差;
目前可对比的baseline太少。
Other results
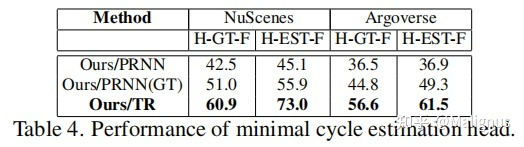
对于minimal cycle的预测,也是transformer-based效果好
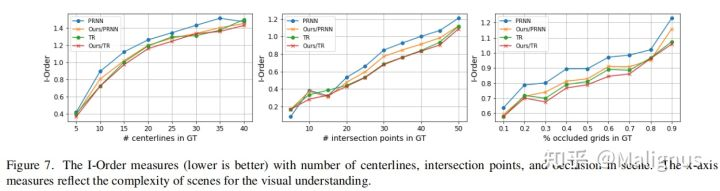
对比了不同情况下的一个I-Order结果(前后的拓扑关系),可以看到Transformer-based效果都是最好的。
5Conclusion
这篇论文到这里就结束啦~ 整体文章其实写的有点乱有点杂,为了弄明白通篇的逻辑,愚笨的我其实读了非常多遍,对于I-Order等文章提出的一些指标或者中间量具体是怎么formulate,可能单独从读论文还是没办法很好的了解到。
作者也给出了这个工作的弊端,就是minimal cycle的训练时间会很长,需要离线去做。而且另外一点值得注意的是,这篇工作其实对于本身车道检测没啥提升,只是formulate了一个新的问题。而且表述不清的地方也比较多,好消息是工作已经开源~可以看看源码
【自动驾驶之心】全栈技术交流群
自动驾驶之心是首个自动驾驶开发者社区,聚焦目标检测、语义分割、全景分割、实例分割、关键点检测、车道线、目标跟踪、3D感知、多传感器融合、SLAM、高精地图、规划控制、AI模型部署落地等方向;
加入我们:自动驾驶之心技术交流群汇总!
自动驾驶之心【知识星球】
想要了解更多自动驾驶感知(分类、检测、分割、关键点、车道线、3D感知、多传感器融合、目标跟踪)、自动驾驶定位建图(SLAM、高精地图)、自动驾驶规划控制、领域技术方案、AI模型部署落地实战、行业动态、岗位发布,欢迎扫描下方二维码,加入自动驾驶之心知识星球(三天内无条件退款),日常分享论文+代码,这里汇聚行业和学术界大佬,前沿技术方向尽在掌握中,期待交流!

最后
以上就是任性奇异果最近收集整理的关于CVPR2022 | 单目车道线检测新方案(苏黎世联邦理工)的全部内容,更多相关CVPR2022内容请搜索靠谱客的其他文章。








发表评论 取消回复