上一篇给大家介绍了卡尔曼滤波,今天再给大家讲讲一阶互补滤波。
一阶互补滤波的程序非常简单,如下
void First_order_Filter(float angle_m, float gyro_m)
{
angle = K1 * angle_m+ (1-K1) * (angle + gyro_m * dt);
}使用的时候,我们只需要如下调用函数:
First_order_Filter(Accel_Angle,Gyro_X); 其中
-
Accel_Angle就是原始计算出的角度值,具体可以查看上篇卡尔曼滤波;
-
Gyro_X就是X轴的角速度,直接从传感器读取,不过要注意单位转换,如图所示
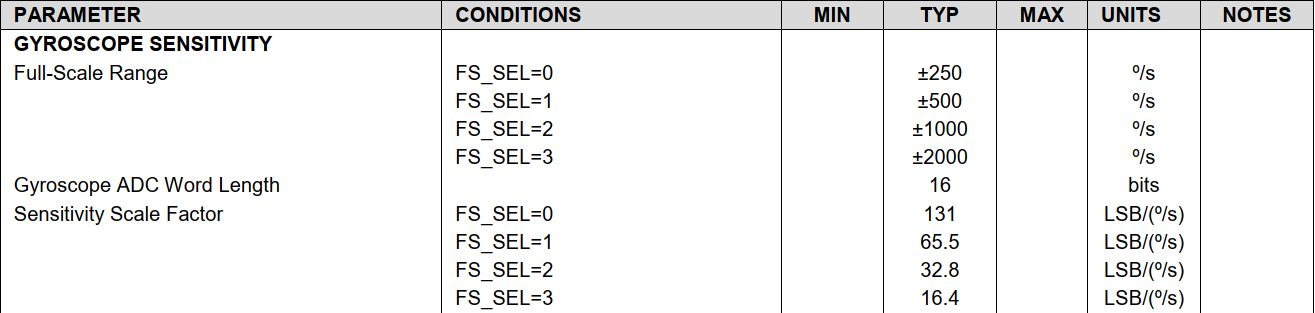
对于MPU6050,我们若选择FS_SEL=3,即±2000度/秒的量程,则需要如下处理
Gyro_X=Gyro_X/16.4; 式子中,
angle = K1 * angle_m+ (1-K1) * (angle + gyro_m * dt);angle_m是根据传感器原始数据计算出的角度;
gyro_m是对应轴的角速度;
dt的值,根据我们采样周期来定。如果我们5ms采样一次,则dt=0.05。在单片机处理能力许可的情况下,我们建议采样频率适当大一些。
而gyro_m* dt,就是在dt时间内,设备转过的角度。
K1的值,根据我们实际需求来,如果希望动态响应快,增大灵敏度,K取值可以大一些;如果想减小传感器本身的系统误差,减少干扰抖动,增强平滑性,K取值可以小一点;这里我们令K1=0.02。
我们将原始数据和一阶互补滤波后的数据绘制出来,如图:
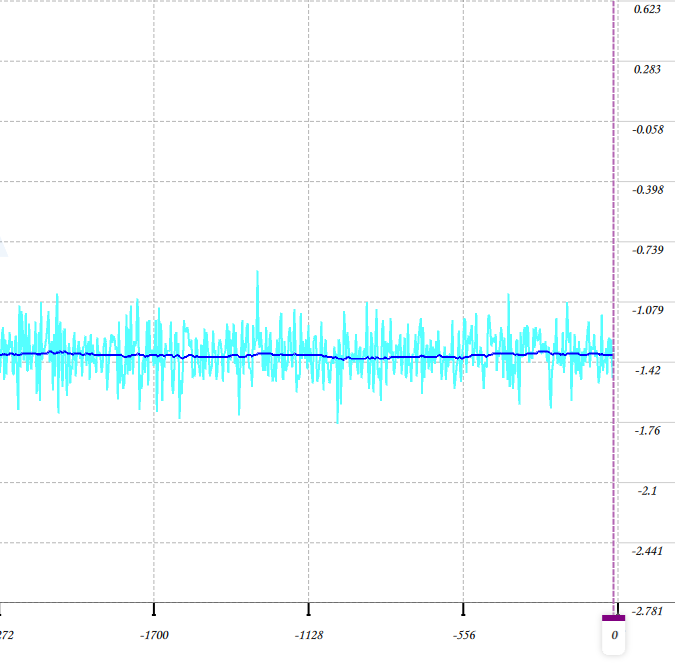
可以看到,加了一阶互补滤波后,数据非常平滑,也很吻合实际情况。
最后
以上就是开放饼干最近收集整理的关于一阶互补滤波的应用的全部内容,更多相关一阶互补滤波内容请搜索靠谱客的其他文章。
本图文内容来源于网友提供,作为学习参考使用,或来自网络收集整理,版权属于原作者所有。








发表评论 取消回复