
大家好, 通过前一期的学习, 我们已经对ICD2 仿真烧写器和增强型PIC 实验板的使用方法及学习方式有所了解与熟悉,学会了如何用单片机来控制发光管、继电器、蜂鸣器、按键、数码管、RS232 串口、步进电机等资源,体会到了学习板的易用性与易学性,看了前几期实例,当你实验成功后一定很兴奋,很有成就感吧!现在我们就趁热打铁,再向上跨一步,一起来学习一下DS18B20 数字温度传感器的工作原理及使用方法,这样我们用单片机来读取温度数值,可以做出很多温控方面的小产品来,如温度计,温度控制继电器的应用系统。
一、 单总线温度传感器DS18B20简介
DS18B20 是DALLAS 公司生产的单总线式数字温度传感器,它具有微型化、低功耗、高性能、搞干扰能力强、易配处理器等优点,特别适用于构成多点温度测控系统,可直接将温度转化成串行数字信号(提供9 位二进制数字)给单片机处理,且在同一总线上可以挂接多个传感器芯片。它具有3 引脚TO - 92 小体积封装形式,温度测量范围为- 55℃~+ 125℃,其工作电源既可在远端引入,也可采用寄生电源方式产生,多个DS18B20 可以并联到3 根或2 根线上,CPU只需一根端口线就能与多个DS18B20 通信,占用微处理器的端口较少,可节省大量的引线和逻辑电路。以上特点使DS18B20 非常适用于远距离多点温度检测系统。
二、 DS18B20外形、引脚及时序
外形及引脚如图1 所示。
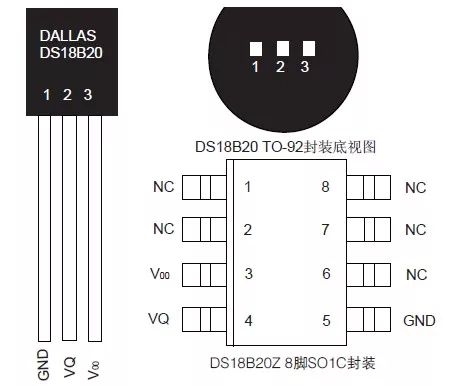
图1 管脚排列图
在TO-92 和SO-8 的封装中引脚有所不同,具体差别请查阅有关手册,在TO-92 封装中引脚分配如下:
1(GND):地
2(DQ):单总线数据输入输出引脚
3(VDD):可选的电源引脚(在某些应用场合可以不接)
单总线有一个主机,能够控制一个或多个从机设备。主机可以是微处理器,从机可以是单总线器件,它们之间的数据交换只通过一条信号线。
当只有一个从机设备时,系统可按单节点系统操作;当有多个从设备时,系统则按多节点系统操作。主机或从机通过一个漏极开路或三态端口连接到这个数据线,以允许设备在不发送数据时能够释放总线,而让其它设备使用总线,其内部等效电路图如图2 所示。单总线通常要求接一个约为4.7K 左右的上拉电阻,这样,当总线空闲时,其状态为高电平。主机和从机之间的通信可以通过三个步骤完成,分别是初始化单总线器件、识别单总线器件、数据交换。由于它们是主从结构,只有主机呼号从机时,从机才能应答,因此主机访问单总线器件时都必须严格遵循单总线命令序列。如果出现序列混乱,单总线器件将不响应主机。
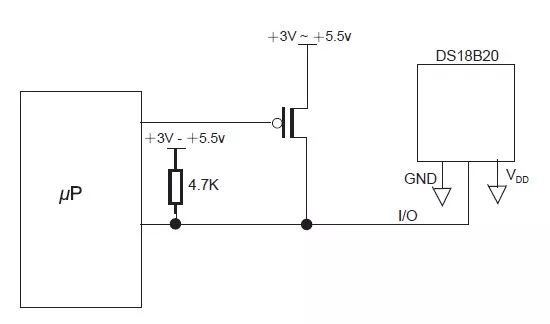
图2 内部等效电路图
所有单总线器件的读、写时序至少需要60μS,且每两个独立的时序间至少需要1μS的恢复时间。在写时序中,主机将在拉低总线15μS 之内释放总线,并向单总线器件写“1”;如果主机拉低总线后能保持至少60μS 的低电平,则向总线器件写“0”。单总线器件仅在主机发出读时序时才向主机传输数据,所以,当主机向单总线器件发出读数据命令后,必须马上产生读时序,以便单总线器件能传输数据。
三、DS18B20工作过程
DS18B20 内部的“低温度系数振荡器”频率随温度变小,振荡信号送计数器1,“高温度系数振荡器”振荡频率随温度变化,振荡信号送计数器2。两者的计数差与温度成正比。DS18B20内部的温度寄存器中的温度值以9 位数据格式表示,最高位为符号位,其余8 位以二进制补码形式表示温度值。测温结束时,这9 位数据转存到暂存存储器的前两个字节中,符号位占用第一字节,8 位温度数据占据第二字节。但因符号位扩展成高8 位,所以最后以16 位补码形式读出。
DS18B20 内部的比较器以四舍五入的量化方式确定温度寄存器的最低有效位。四舍五入最大量化误差为±1/2LSB,即0.25℃。
而一般模拟量输出的温度传感器我们还需要加上一个AD 模数转换电路才可以将数据传给单片机,但是DS18B20 的输出口可以直接和单片机I/O 口相连,我们只需要操作单片机的一个I/O 口,就可以获得温度值了,使用更加简单、方便。
现在,我们来一起看一个数字温度通过数码管显示的例子,通过一个实例,相信会给大家带来一个感性的认识。
四、温度采集应用实例
首先,我们来看一下增强型PIC 实验板上的DS18B20 温度传感器的接口电路,因为我们需要将软件和硬件相结合进行考虑如何来编程,完成该实验的硬件原理图如图3 所示,J5 为实验板上温度传感器的接口,传感器输出的数据与单片机的RD5 口相连,七段数码管D5、D7、D8组成了显示单元,字形码的数据通过RC 口送入,各数码管的显示片选信号分别不同的RA 口进行控制。
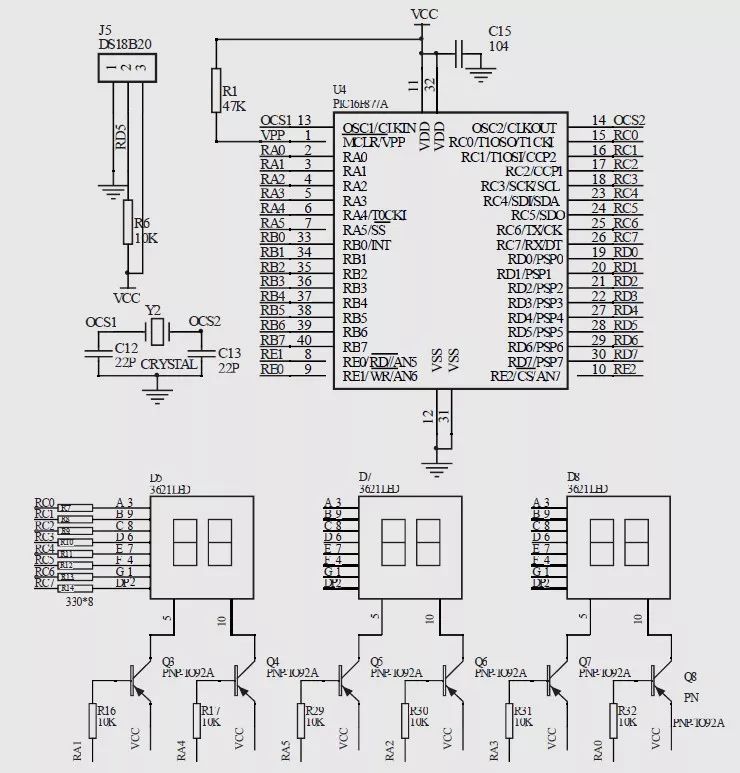
图3 硬件原理图
对于单片机软件的编程,我们使用MPLabIDE 软件来进行C 语言编程,它是我们的编程环境,同时我们可以通过使用ICD2 仿真烧写器和增强型PIC 实验板连接进行程序的仿真调试和烧写步骤,具体的操作步骤,我们已经在前几期做了详细的说明和介绍,在此就不再重复说明,读者朋友可以参阅以前的文章或直接登陆我们的网站查看资料。现在我们可以输入程序代码进行调试了,我们在MPLab IDE 软件中新建工程,加入源程序代码,同时进行芯片型号的选择和配置位的设置,我们实验所用的芯片型号为PIC16F877A。编写的程序代码如下:
#include // 包含头文件
#define uch unsigned char // 宏定义
# define DQ RD5 // 端口定义
# define DQ_DIR TRISD5 // 端口定义
# define DQ_HIGH() DQ_DIR =1
# define DQ_LOW() DQ = 0; DQ_DIR = 0
// 设置数据口为输出
// 变量定义
unsigned char TLV=0; // 采集到的温度高8 位
unsigned char THV=0; // 采集到的温度低8 位
unsigned char TZ=0;
// 转换后的温度值整数部分
unsigned char TX=0; // 转换后的温度值小数部分
unsigned int wd; // 转换后的温度值BCD 码形式
unsigned char shi; // 整数十位
unsigned char ge; // 整数个位
unsigned char shifen; // 十分位
unsigned char baifen; // 百分位
unsigned char table[]={0xc0,0xf9,0xa4,0xb0,0x99,0x92,0x82,0xf8,0x80,0x90};
// 共阴LED 段码表 0-9 的显示代码
void delay(char x,char y)
// 函数功能:数码管延时子程序
{
char z;
do{
z=y;
do{;}while(--z);
}while(--x);
}
void display() // 函数功能:数码管显示子程序
{
TRISA=0X00; // 设置A 口全为输出
PORTC=table[shi]; // 显示整数十位
PORTA=0xEF;
delay(10,70);
PORTC=table[ge]&0x7F; // 显示整数个位,并
点亮小数点
PORTA=0xDF;
delay(10,70);
PORTC=table[shifen]; // 显示小数十分位
PORTA=0xFB;
delay(10,70);
PORTC=table[baifen]; // 显示小数百分位
}
void init() // 函数功能:系统初始化函数
{
ADCON1=0x07; // 设置A 口为普通数字口
TRISA=0x00; // 设置A 口方向为输出
TRISD=0x00; // 设置D 口方向为输出
TRISC=0x00;
PORTD=0xff;
}
reset(void) // 复位DS18B20 函数函数
{
char presence=1;
while(presence)
{
DQ_LOW() ; // 主机拉至低电平
delay(2,70);// 延时503us
DQ_HIGH();// 释放总线等电阻拉高总线,
并保持15~60us
delay(2,8);// 延时70us
if(DQ==1)
presence=1;
// 没有接收到应答信号,继续复位
else
presence=0; // 接收到应答信号
delay(2,60);// 延时430us
}
}
void write_byte(uch val)
// 写18b20 写字节函数函数
{
uch i;
uch temp;
for(i=8;i>0;i--)
{
temp=val&0x01; // 最低位移出
DQ_LOW();
NOP();
NOP();
NOP();
NOP();
NOP();
// 从高拉至低电平, 产生写时间隙
if(temp==1)
DQ_HIGH();// 如果写1, 拉高电平
delay(2,7);// 延时63us
DQ_HIGH();
NOP();
NOP();
val=val》1; // 右移一位
}
}
uch read_byte(void)
// 函数功能:18b20 读字节函数函数
{
uch i;
uch value=0; // 读出温度
static bit j;
for(i=8;i>0;i--)
{
value》=1;
DQ_LOW();
NOP();
NOP();
NOP();
NOP();
NOP();
NOP();//6us
DQ_HIGH();// 拉至高电平
NOP();
NOP();
NOP();
NOP();
NOP();//4us
j=DQ;
if(j) value|=0x80;
delay(2,7);//63us
}
return(value);
}
void get_temp()
// 函数功能:启动温度转换函数函数
{
int i;
DQ_HIGH();
reset();// 复位等待从机应答
write_byte(0xCC);// 忽略ROM 匹配
write_byte(0x44);// 发送温度转化命令
for(i=20;i>0;i--)
{
display();
// 调用多次显示函数,确保温度转换完成所需要的时间
}
reset();// 再次复位,等待从机应答
write_byte(0xCC);// 忽略ROM 匹配
write_byte(0xBE);// 发送读温度命令
TLV=read_byte();// 读出温度低8 位
THV=read_byte();// 读出温度高8 位
DQ_HIGH();// 释放总线
TZ=(TLV》4)|(THV《4)&0x3f;
// 温度整数部分
TX=TLV《4; // 温度小数部分
if(TZ>100)
TZ/100; // 不显示百位
ge=TZ%10; // 整数部分个位
shi=TZ/10; // 整数十位
wd=0;
if (TX & 0x80)
wd=wd+5000;
if (TX & 0x40)
wd=wd+2500;
if (TX & 0x20)
wd=wd+1250;
if (TX & 0x10)
wd=wd+625;
// 以上4 条指令把小数部分转换为BCD 码形式
shifen=wd/1000; // 十分位
baifen=(wd%1000)/100; // 百分位
NOP();
}
void main() // 主函数
{
init();// 调用系统初始化函数
while(1)
{
get_temp();// 调用温度转换函数
display();// 调用结果显示函数
}
}
编好程序后,读者朋友可以先将DS18B20温度传感器插上实验板,如图4 所示,然后将编译好的HEX 通过ICD2 仿真烧写器烧入单片机芯片,上电运行。
图4 DS18B20 插在增强型PIC 实验板上的样子
前面,我们输入了这么长一段程序后,作为初学者的读者一定对有些语句会有点疑问,程序中的关键语句和函数,请看程序中的注释部份,相信很多常用的函数,在前几期的教程中大家已经见过,不再陌生,这次的实例中,最主要的是温度转换函数,读者朋友可以将DS18B20 的数据手册和源程序相结合来进行分析,由于文章篇幅有限,我们在此不再延伸,如果在学习中碰到问题也可以登陆我们的网站进行交流。


为了方便大家更好的学习,您还可以关注畅学电子和EDA的公众号,每天推送相关知识,希望能对你的学习有所帮助!


最后
以上就是舒适大船最近收集整理的关于ds18b20温度转换指令_PIC单片机之温度采集的全部内容,更多相关ds18b20温度转换指令_PIC单片机之温度采集内容请搜索靠谱客的其他文章。








发表评论 取消回复