在使用直接线性变换(DLT)算法求解基础矩阵F或者单应矩阵H时,必须先进行数据归一化处理。归一化变换将消除由任意选取图像坐标系的原点和尺度所产生的影响。
归一化的方法包括图像坐标的平移和尺度缩放,归一化必须在实施DLT之前进行,然后再对结果进行适当的校正就能得到关于原坐标系的基础矩阵F或者单应矩阵H。
下面以单应矩阵为例介绍归一化DLT的流程
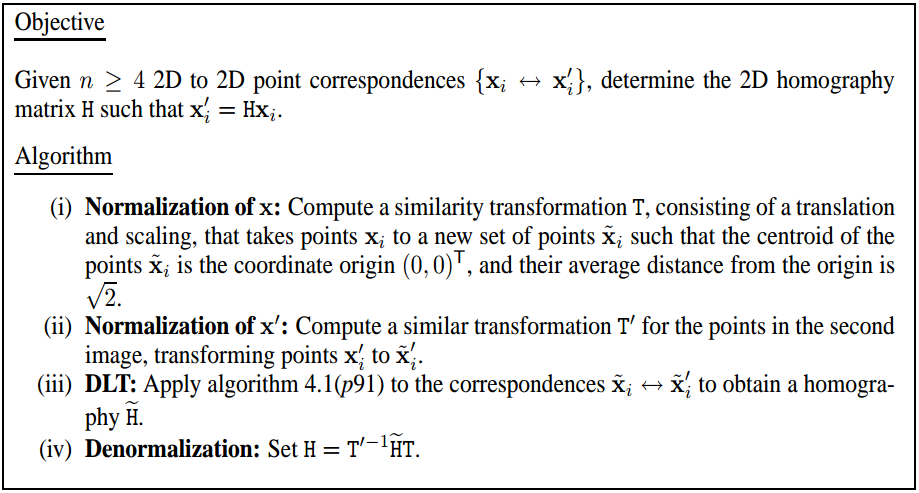
归一化过程可概括如下:
(1)对点进行平移使其形心位于圆点
(2)对点进行缩放
(3)对两幅图像上的特征点都进行上述变换
归一化之后,即可对基础矩阵F或者单应矩阵H进行求解,求解完成之后要进行去归一化的操作。
下面以ORBSLAM2中使用归一化DLT求解单应矩阵H的代码实现上述过程:
void Initializer::Normalize(const vector<cv::KeyPoint> &vKeys, vector<cv::Point2f> &vNormalizedPoints, cv::Mat &T)
{
///这里的归一化,归一的是这些点在x方向和在y方向上的一阶绝对矩。步骤如下:
const int N = vKeys.size();// 点总数
vNormalizedPoints.resize(N);//标准化后的点
float meanX = 0;//横坐标均值
float meanY = 0;//纵坐标均值
for(int i=0; i<N; i++)
{
meanX += vKeys[i].pt.x;// 横坐标之和
meanY += vKeys[i].pt.y;// 纵坐标之和
}
meanX = meanX/N;//横坐标均值
meanY = meanY/N;//纵坐标均值
// 分别累计这些特征点偏离横纵坐标均值的多少
float meanDevX = 0;//绝对矩
float meanDevY = 0;//绝对矩
// 将所有vKeys点减去中心坐标,使x坐标和y坐标均值分别为0
for(int i=0; i<N; i++)
{
vNormalizedPoints[i].x = vKeys[i].pt.x - meanX;// 去均值点坐标
vNormalizedPoints[i].y = vKeys[i].pt.y - meanY;
//累计这些特征点偏离横纵坐标均值的程度
meanDevX += fabs(vNormalizedPoints[i].x);// 总绝对矩
meanDevY += fabs(vNormalizedPoints[i].y);
}
// 求出平均到每个点上,其坐标偏离横纵坐标均值的程度;将其倒数作为一个尺度缩放因子
meanDevX = meanDevX/N; //均值绝对矩
meanDevY = meanDevY/N;
float sX = 1.0/meanDevX;
float sY = 1.0/meanDevY;
// 将x坐标和y坐标分别进行尺度缩放,使得x坐标和y坐标的一阶绝对矩分别为1
// 这里所谓的一阶绝对矩其实就是随机变量到取值的中心的绝对值的平均值, 归一化就体现在这里
for(int i=0; i<N; i++)
{
// 归一化后的点坐标 //就是简单地对特征点的坐标进行进一步的缩放
vNormalizedPoints[i].x = vNormalizedPoints[i].x * sX; // 去均值点坐标 * 绝对矩倒数
vNormalizedPoints[i].y = vNormalizedPoints[i].y * sY;
}
///计算归一化矩阵
// |sX 0 -meanx*sX|
// |0 sY -meany*sY|
// |0 0 1 |
// 标准化矩阵
// 标准化矩阵 * 点坐标 = 标准化后的坐标
// 点坐标 = 标准化矩阵的逆矩阵 * 标准化后的的坐标
T = cv::Mat::eye(3,3,CV_32F);
T.at<float>(0,0) = sX;
T.at<float>(1,1) = sY;
T.at<float>(0,2) = -meanX*sX;
T.at<float>(1,2) = -meanY*sY;
}
然后是求解单应矩阵H的过程
//归一化后的参考帧和当前帧中的特征点坐标
vector<cv::Point2f> vPn1, vPn2;// 2d-2d点对
//各自的归一化矩阵
//其实这里的矩阵归一化操作主要是为了在单目初始化过程中,固定场景的尺度,原理可以参考SLAM十四讲P152
cv::Mat T1, T2;// 标准化矩阵
Normalize(mvKeys1,vPn1, T1);// 标准化点坐标 去均值点坐标 * 绝对矩倒数
Normalize(mvKeys2,vPn2, T2);
//这里求的逆在后面的代码中要用到,辅助进行原始尺度的恢复
cv::Mat T2inv = T2.inv();// 标准化矩阵 逆矩阵
cv::Mat H21i, H12i;// 原点对的单应矩阵 // H21i 原始点
///此处略去了随机取8对对应约束的过程,vPn1i,vPn2i即迭代过程中选取的对应点对。
cv::Mat Hn = ComputeH21(vPn1i,vPn2i);// 计算标准化后的点对的单应矩阵
// 去归一化,恢复原始的均值和尺度
H21i = T2inv*Hn*T1; // 原始点 p1 ---> p2 的单应
H12i = H21i.inv(); // 原始点 p2 ---> p1 的单应
最后
以上就是标致口红最近收集整理的关于SLAM中求基础矩阵和单应矩阵的归一化变换的全部内容,更多相关SLAM中求基础矩阵和单应矩阵内容请搜索靠谱客的其他文章。
本图文内容来源于网友提供,作为学习参考使用,或来自网络收集整理,版权属于原作者所有。








发表评论 取消回复