Lee Hung-yi强化学习专栏系列博客主要转载自CSDN博主 qqqeeevvv,原专栏地址
课程视频
课件地址
普通的Q-learning比policy gradient比较容易实现,但是在处理连续动作(比如方向盘要转动多少度)的时候就会显得比较吃力。
因为如果action是离散的几个动作,那就可以把这几个动作都代到Q-function去算Q-value。但是如果action是连续的,此时action就是一个vector,vector里面又都有对应的value,那就没办法穷举所有的action去算Q-value。
先介绍2种容易想到但效果不一定好的方法
1. 穷举action

这个方法sample N个action,一个一个代到Q function里,看哪个a得到的Q value最大。
缺点:即便sample 很多很多个action,还是没办法把所有的action都穷举出来(因为它是连续动作)。这样就会导致结果不那么精确。
2. 使用梯度上升求Q value

使用gradient ascent来求解,看采取什么action能让Q-function得到最大的Q value。
缺点:
1)由于使用gradient ascent,可能得到的结果只是局部的最优解。
2)每次考虑采取哪个a前,都要做一次类似于train network的工作,这个运算量太大
以上两种方法是比较容易想到,但是效果不好的方法,下面介绍一个比较好的方法
3. Normalized Advantage Functions(NAF)
设计一个新的网络来解连续动作的最优化问题。
论文地址
先给出概念如下,后面再讲具体的。

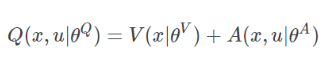
此时Q value 由状态值函数V与动作价值函数 A 相加而得。

其中 x 表示状态State,u表示动作Action,θ 是对应的网络参数,A函数可以看成动作 u 在状态 x 下的优势。我们的目的就是要使网络输出的动作 u 所对应的Q值最大。
具体来说,如下:
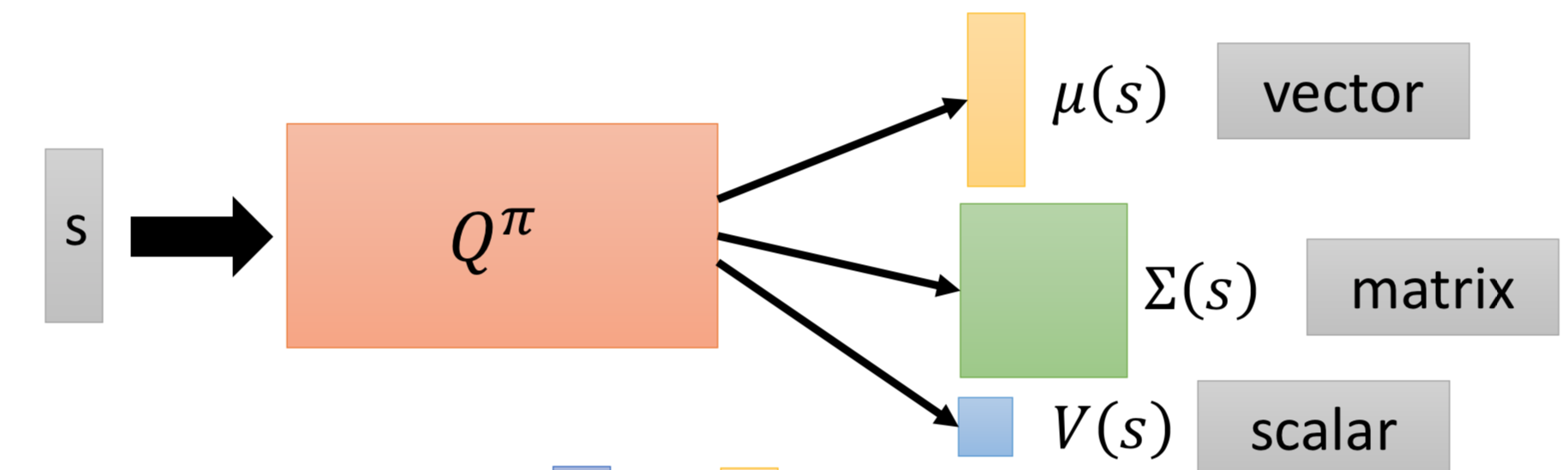
从buffer里sample一个batch的transition
(
s
t
,
a
t
,
r
t
,
s
t
+
1
)
(s_t,a_t,r_t,s_{t+1})
(st,at,rt,st+1),新的Q function以状态
s
t
s_t
st,动作
a
t
a_t
at作为输入,依据输入的
s
t
s_t
st得到输出
μ
(
s
t
)
mu (s_t)
μ(st)(vector),
Σ
(
s
t
)
Sigma (s_t)
Σ(st)(matrix),
V
(
s
t
)
V(s_t)
V(st)(scalar)
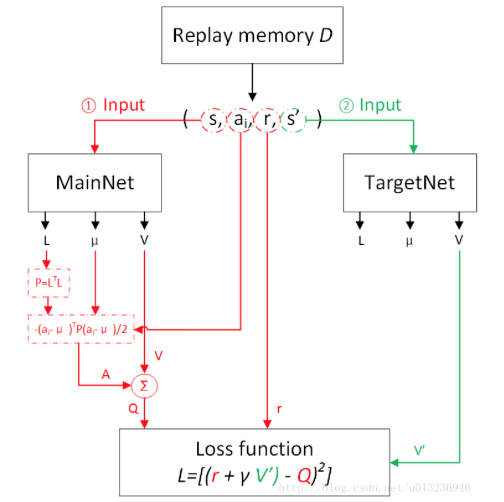
其中,在输出 Σ ( s t ) Sigma (s_t) Σ(st)这个矩阵前,其实先输出了矩阵L,矩阵L是对角线都是正数的下三角矩阵。然后根据乔列斯基(Cholesky)分解,构造出最终的 Σ ( s t ) Sigma (s_t) Σ(st)这个矩阵(对应上式的P矩阵)。
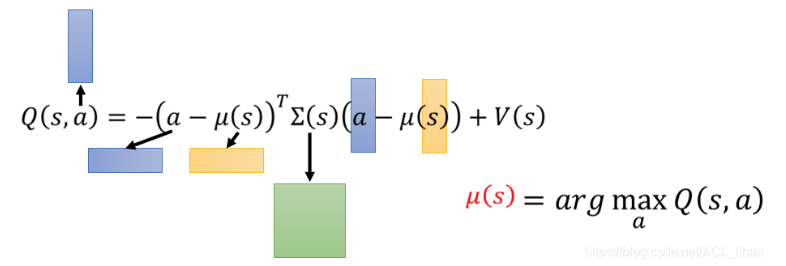
输入的动作a再与上面三个结果进行组合形成Q function,如下图:
a和
μ
(
s
)
mu (s)
μ(s)转置后,变成1行N列;与矩阵相乘;再与a和
μ
(
s
)
mu (s)
μ(s)(N行1列)相乘,最终变成一个普通的数值,即标量(scalar),再加上V(s)就是最后的Q value。另外,在状态s下要做出的action由
μ
(
s
)
mu (s)
μ(s)给出。这样,NAF就实现既输出动作action,也输出这个action对应的Q value。(这时候再看一下,上图的前三项其实就是类似于文章前面公式中的A函数(优势函数)。)
接下来看如何使Q function输出的Q value达到最大值,NAF的Q function:
优势函数(advantage function)可以看成
A
(
s
,
a
)
=
−
(
a
−
μ
(
s
)
)
2
×
P
A(s,a) = -(a-mu(s))^2times P
A(s,a)=−(a−μ(s))2×P,又因为P矩阵在论文中有设定为是正定的矩阵,那么A就是一个小于等于0的值。
所以,理想的情况就是当 μ ( s ) = a mu (s) = a μ(s)=a,那么此时A函数达到最大值0,那么Q function也得到最大的Q value。
可能有人疑惑:
既然是通过
μ
(
s
)
mu (s)
μ(s)输出action,那输入的action是干什么的?
输入的action 是从transition中sample的动作,是起到训练网络中的label的作用。目的是让网络输出的
μ
(
s
)
mu (s)
μ(s)不偏离 a 太多并且希望最后
μ
(
s
)
mu (s)
μ(s)逐点收敛于a,从而得到最大的Q value。
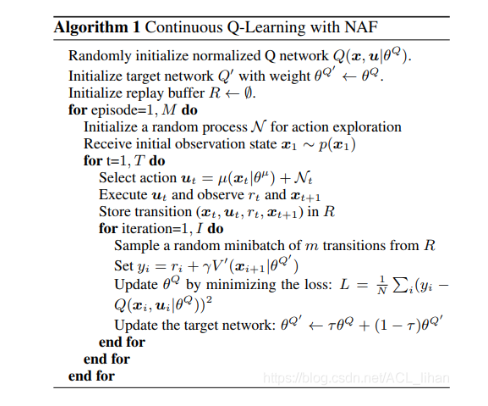
下图为NAF执行过程(图参考自)
NAF伪代码如下:
Normalized Advantage Functions(NAF)更多内容可参考以下博文:
https://blog.csdn.net/lipengcn/article/details/81840756
https://blog.csdn.net/u013236946/article/details/73243310
https://zhuanlan.zhihu.com/p/21609472
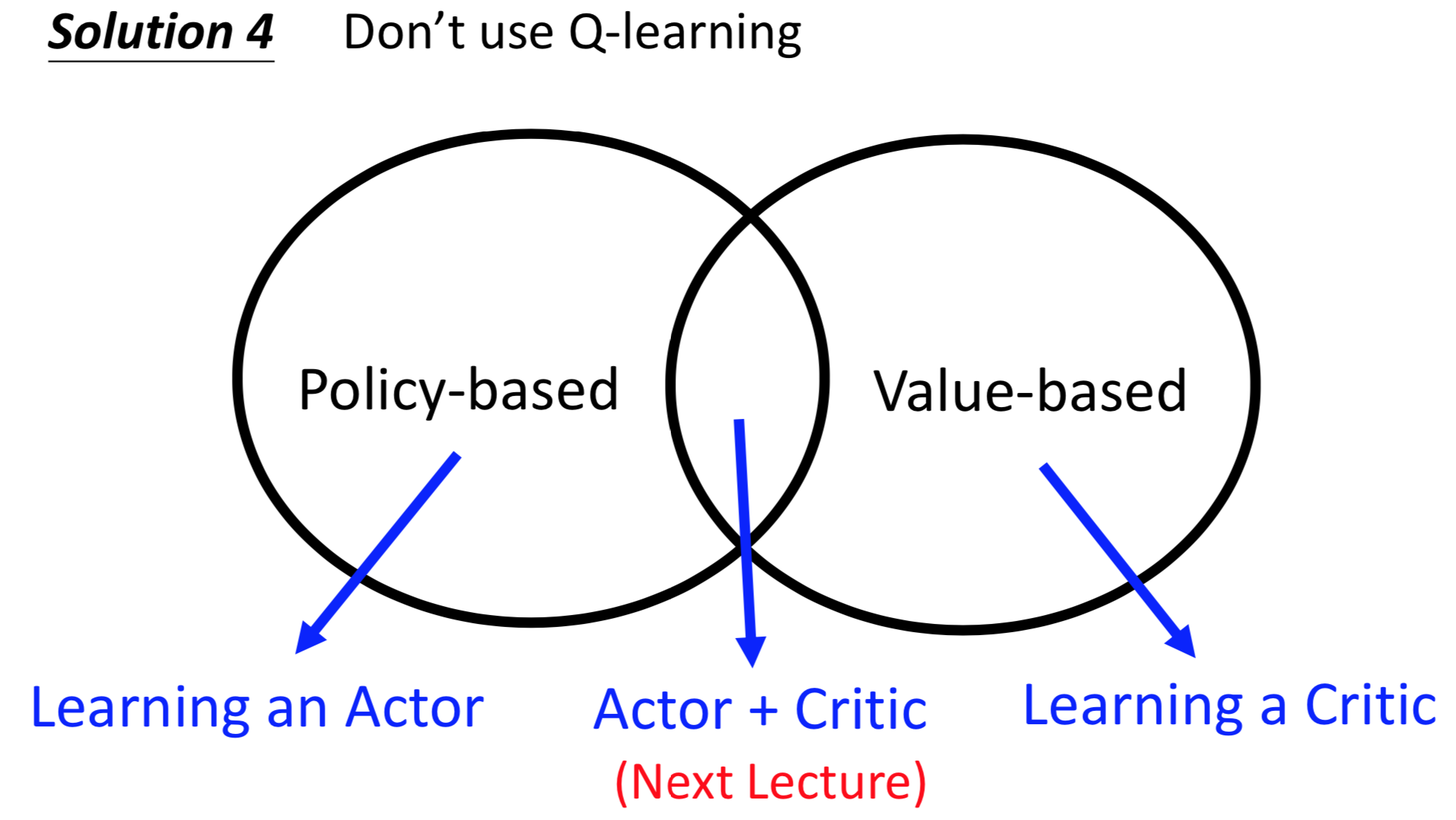
4. 不使用Q-learning而使用actor-critic
最后
以上就是称心龙猫最近收集整理的关于Lee Hung-yi强化学习 | (5) Q-learning用于连续动作 (NAF算法)的全部内容,更多相关Lee内容请搜索靠谱客的其他文章。








发表评论 取消回复