模糊逻辑控制简称模糊控制,是以模糊集合论、模糊语言变量和模糊逻辑推理为基础的一种计算机数字控制技术。模糊控制实质上是一种非先行控制,从属于智能控制的范畴。模糊控制的一大特点是既有系统化的理论,又有大量的实际应用背景。
前面在学习的过程中多次使用到模糊控制器,从ESP的模型到基于坡度识别算法的转矩补偿控制策略,都或多或少的用到了模糊控制器,每次都是用到的时候重新学一遍,因此在这里做一个简单的总结。
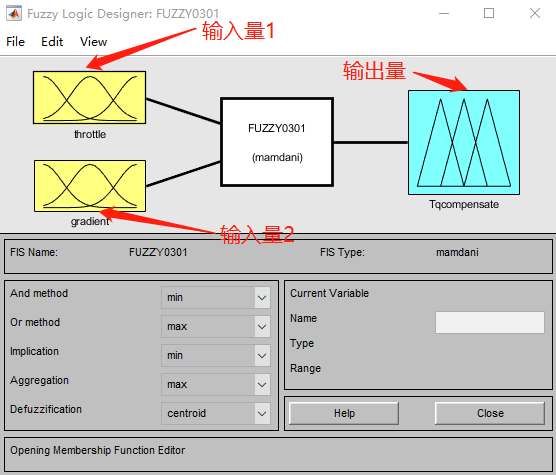
打开模糊控制器:直接在命令栏键入fuzzy;
新建模糊控制系统:Ctrl+S即可;
打开已有的控制器:菜单栏File->Import;将控制器的结果导出到SIMULINK中:菜单栏File->Export
接下来就是常规的步骤:
- 先选定输入量和输出量,然后对输入输出量进行编辑。
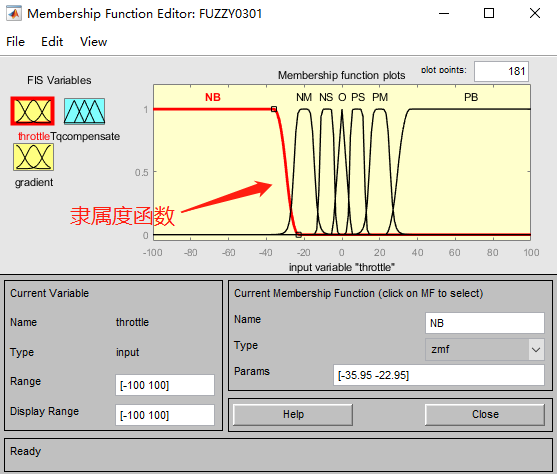
- 双击输入量,进行编辑。设置其论域(Range),模糊集名称(Name),隶属度函数类型(Type),隶属度函数参数(Params)。设置结束之后,按照同样的方法对输出量进行设置。
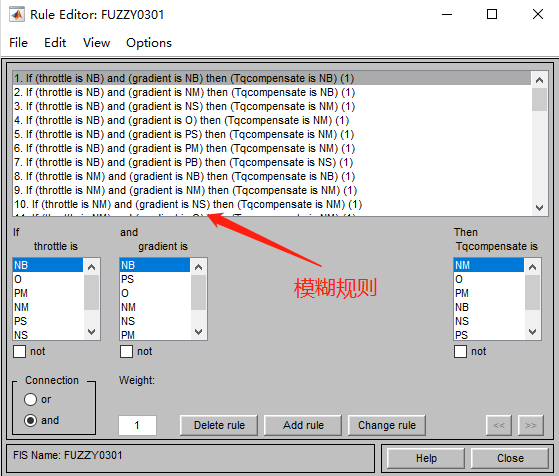
- 编写模糊规则。双击输入和输出量中间白色的方框,进入模糊规则的编写。在这里需要说明的是,模糊规则的编写一般是通过经验得到,然后将输入模糊子集和输出模糊自己进行规则对应。
- 规则观察器和模糊推理框图。去模糊化的过程MATLAB通过内部的程序会自行完成,我们只需要观察其结果即可,可以通过View->rules来查看规则试图,可以在线输入特定的值观察输出值。
总结以下,模糊控制的原理很简单,就是:输入模糊化-->模糊推理-->去模糊化。
最后
以上就是漂亮八宝粥最近收集整理的关于模糊控制算法在MATLAB/SIMULINK中的应用的全部内容,更多相关模糊控制算法在MATLAB/SIMULINK中内容请搜索靠谱客的其他文章。
本图文内容来源于网友提供,作为学习参考使用,或来自网络收集整理,版权属于原作者所有。








发表评论 取消回复