原文链接:
目录
- 1. 入坑始末
- 2. 启动 Cozmo
- 3. 开始鼓捣
- 4. 开发环境搭建——Cozmo Explorer Tool 安装
- 4.1. 下载
- 4.2. 安装依赖
- 4.2.1. Cozmo SDK 安装
- 4.2.1.1. Python Installation
- 4.2.1.2. SDK Installation
- 4.2.1.3. SDK Upgrade
- 4.2.1.4. 手机驱动安装(补充步骤)
- 4.2.2. 安装 Pillow 模块
- 4.2.3. 安装 Flask 模块
- 4.2.4. 安装 Flask Socket-IO 模块
- 4.2.1. Cozmo SDK 安装
- 5. 启动 Cozmo Explorer Tool
- 5.1. 报错 1
- 5.2. 再次启动,弹出一个网页显示 500
- 5.3. 查看目录中 README
- 5.4. 启动 explorer_tool.py
- 6. Python 开发 —— 远程控制及示例脚本运行
- 6.1. 项目 Anki Cozmo - Python SDK
- 6.2. 下载 SDK Examples
- 6.3. 查看 SDK Examples 内容
- 6.4. 离成功不远了
- 6.5. 启动远程控制—— remote_control_cozmo.py
- 7. 执行示例脚本
- 7.1. 执行 tutorials/01_basics/ 脚本
- 7.2. 执行 tutorials/02_cozmo_face/ 脚本
- 7.3. 执行 tutorials/03_vision/ 脚本
- 7.4. 执行 tutorials/04_cubes_and_objects/ 脚本
- 7.5. 执行 tutorials/05_async_python/ 脚本
- 7.6. 执行 tutorials/06_actions/ 脚本
- 8. 用 IDE 开发 Cozmo Python 程序
- 8.1. 写在前面重要的话
- 8.2. 开始码代码
- 8.3. 编写 “say 晚安” 程序
- 8.3.1. 拷贝 01_hello_world.py 重命名为 nightnight.py
- 8.3.2. 使用 IDE 或文本编辑器打开 nightnight.py
- 8.3.3. 对每行内容进行说明
- 8.3.4. 修改文本内容
- 8.3.5. 保存并执行
- 8.4. 后续开发建议
- 9. 后记
参考文章:
目录
- 1. 入坑始末
- 2. 启动 Cozmo
- 3. 开始鼓捣
- 4. 开发环境搭建——Cozmo Explorer Tool 安装
- 4.1. 下载
- 4.2. 安装依赖
- 4.2.1. Cozmo SDK 安装
- 4.2.1.1. Python Installation
- 4.2.1.2. SDK Installation
- 4.2.1.3. SDK Upgrade
- 4.2.1.4. 手机驱动安装(补充步骤)
- 4.2.2. 安装 Pillow 模块
- 4.2.3. 安装 Flask 模块
- 4.2.4. 安装 Flask Socket-IO 模块
- 4.2.1. Cozmo SDK 安装
- 5. 启动 Cozmo Explorer Tool
- 5.1. 报错 1
- 5.2. 再次启动,弹出一个网页显示 500
- 5.3. 查看目录中 README
- 5.4. 启动 explorer_tool.py
- 6. Python 开发 —— 远程控制及示例脚本运行
- 6.1. 项目 Anki Cozmo - Python SDK
- 6.2. 下载 SDK Examples
- 6.3. 查看 SDK Examples 内容
- 6.4. 离成功不远了
- 6.5. 启动远程控制—— remote_control_cozmo.py
- 7. 执行示例脚本
- 7.1. 执行 tutorials/01_basics/ 脚本
- 7.2. 执行 tutorials/02_cozmo_face/ 脚本
- 7.3. 执行 tutorials/03_vision/ 脚本
- 7.4. 执行 tutorials/04_cubes_and_objects/ 脚本
- 7.5. 执行 tutorials/05_async_python/ 脚本
- 7.6. 执行 tutorials/06_actions/ 脚本
- 8. 用 IDE 开发 Cozmo Python 程序
- 8.1. 写在前面重要的话
- 8.2. 开始码代码
- 8.3. 编写 “say 晚安” 程序
- 8.3.1. 拷贝 01_hello_world.py 重命名为 nightnight.py
- 8.3.2. 使用 IDE 或文本编辑器打开 nightnight.py
- 8.3.3. 对每行内容进行说明
- 8.3.4. 修改文本内容
- 8.3.5. 保存并执行
- 8.4. 后续开发建议
- 9. 后记
目录
- 1. 入坑始末
- 2. 启动 Cozmo
- 3. 开始鼓捣
- 4. 开发环境搭建——Cozmo Explorer Tool 安装
- 4.1. 下载
- 4.2. 安装依赖
- 4.2.1. Cozmo SDK 安装
- 4.2.1.1. Python Installation
- 4.2.1.2. SDK Installation
- 4.2.1.3. SDK Upgrade
- 4.2.1.4. 手机驱动安装(补充步骤)
- 4.2.2. 安装 Pillow 模块
- 4.2.3. 安装 Flask 模块
- 4.2.4. 安装 Flask Socket-IO 模块
- 4.2.1. Cozmo SDK 安装
- 5. 启动 Cozmo Explorer Tool
- 5.1. 报错 1
- 5.2. 再次启动,弹出一个网页显示 500
- 5.3. 查看目录中 README
- 5.4. 启动 explorer_tool.py
- 6. Python 开发 —— 远程控制及示例脚本运行
- 6.1. 项目 Anki Cozmo - Python SDK
- 6.2. 下载 SDK Examples
- 6.3. 查看 SDK Examples 内容
- 6.4. 离成功不远了
- 6.5. 启动远程控制—— remote_control_cozmo.py
- 7. 执行示例脚本
- 7.1. 执行 tutorials/01_basics/ 脚本
- 7.2. 执行 tutorials/02_cozmo_face/ 脚本
- 7.3. 执行 tutorials/03_vision/ 脚本
- 7.4. 执行 tutorials/04_cubes_and_objects/ 脚本
- 7.5. 执行 tutorials/05_async_python/ 脚本
- 7.6. 执行 tutorials/06_actions/ 脚本
- 8. 用 IDE 开发 Cozmo Python 程序
- 8.1. 写在前面重要的话
- 8.2. 开始码代码
- 8.3. 编写 “say 晚安” 程序
- 8.3.1. 拷贝 01_hello_world.py 重命名为 nightnight.py
- 8.3.2. 使用 IDE 或文本编辑器打开 nightnight.py
- 8.3.3. 对每行内容进行说明
- 8.3.4. 修改文本内容
- 8.3.5. 保存并执行
- 8.4. 后续开发建议
- 9. 后记
1. 入坑始末
-
前几日,朋友在群里发了一个机器人的小视频,视频里机器人可以对话,可以推箱子,开心以后会哈哈大笑,非常有趣。
-
详细了解里一下,这是个叫 Cozmo 的智能机器人,可以配合 SDK 用 Python 编程,兴趣一下子就来了,询问了一下价格,闲鱼 500 左右。顺便跟同事看了一下,同事也感兴趣,立马去闲鱼淘了 2个 蓝色限量款。
-
第一天下单,没想到第二天下午就到了,哈哈哈。满心激动的打开箱子,里面有:
- 说明书
- 充电器
- 3 个魔方
- 还有一个就是 Cozmo 本体了
-
先上张图

原文链接:https://www.cnblogs.com/David-domain/p/11216603.html
2. 启动 Cozmo
-
打开箱子以后,接下来就是要启动 Cozmo 了,拿起 Cozmo 找了好几圈都没找到开关,emmm~~什么鬼?
-
通过阅读说明书才知道,Cozmo 开机其实很简单,把充电座接上电,把 Cozmo 放上去就可以了。Cozmo 的底部有 2 个金属触点,通电后屏幕就亮了。

-
屏幕上有 2 行字,这 2 行字的用途稍后说明。
-
接下来我们需要掏出手机,下载 App。
-
App 有 iOS 和 Android 两种,值得注意的是:iOS 版本即使在国内,也可以直接从 App Store 下载安装;而 Android 版需要连接 Google Store 才能下载,不禁吐槽一下,国内的 Go 开发者还真是艰难。
-
为了方便起见,祭出了我的神器——老古董 5s。下载、安装完成 App 后,更换 Wi-Fi 。Wi-Fi 名就是 Cozmo 屏幕右上方的一串字,名为
Cozmo_700xxx的 Wi-Fi,密码则是第2行的一长串字符串。 -
连接成功后,切换 App 连接 Cozmo,此时就可以互动了。
原文链接:https://www.cnblogs.com/David-domain/p/11216603.html
3. 开始鼓捣
- App 上可以互动的功能比较多,但是 App 编程只有一个类似 Scratch 的模块,对于具有探索精神的程序猿来说,肯定不能满足于此,so,立马打开官方手册,准备搭建开发环境。
- 官方的 SDK 放在了 GitHub ,链接地址: Cozmo Explorer Tool
- UI 界面,通过该 SDK,你可以看到 cozmo 看到的世界,以及在它观察到这个世界时,在思考什么。
- 闲话少叙,下面进入正题。
原文链接:https://www.cnblogs.com/David-domain/p/11216603.html
4. 开发环境搭建——Cozmo Explorer Tool 安装
4.1. 下载
git clone https://github.com/GrinningHermit/Cozmo-Explorer-Tool.git
4.2. 安装依赖
4.2.1. Cozmo SDK 安装
-
快速浏览 README 后,找到了 docs 链接:Welcome to the Cozmo SDK!。
-
因为我使用的是 MacBook,直接浏览 Mac OSX 部分: Installation - macOS / OS X
-
安装步骤很简单,总共需要 3 步:
4.2.1.1. Python Installation
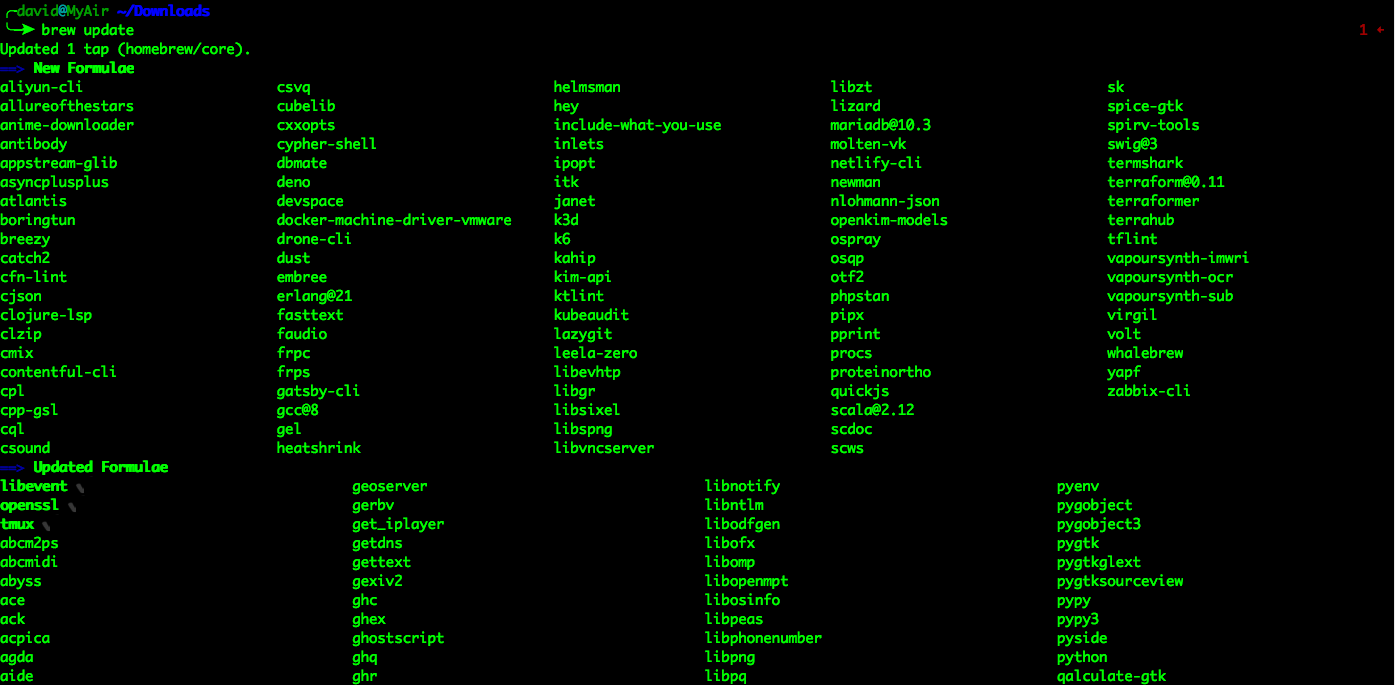
# 首先,根据说明安装最新的 Homebrew
# 如果已经安装了BREW,请打开终端窗口并键入以下内容来更新它:
brew update
# 安装并更新homebrew后,在终端窗口中键入以下内容以安装最新版本的python 3:
brew install python3
4.2.1.2. SDK Installation
# 在终端中输入以下命令安装 SDK
pip3 install --user 'cozmo[camera]'
# [camera] 选项增加了对 Cozmo 相机处理图像。
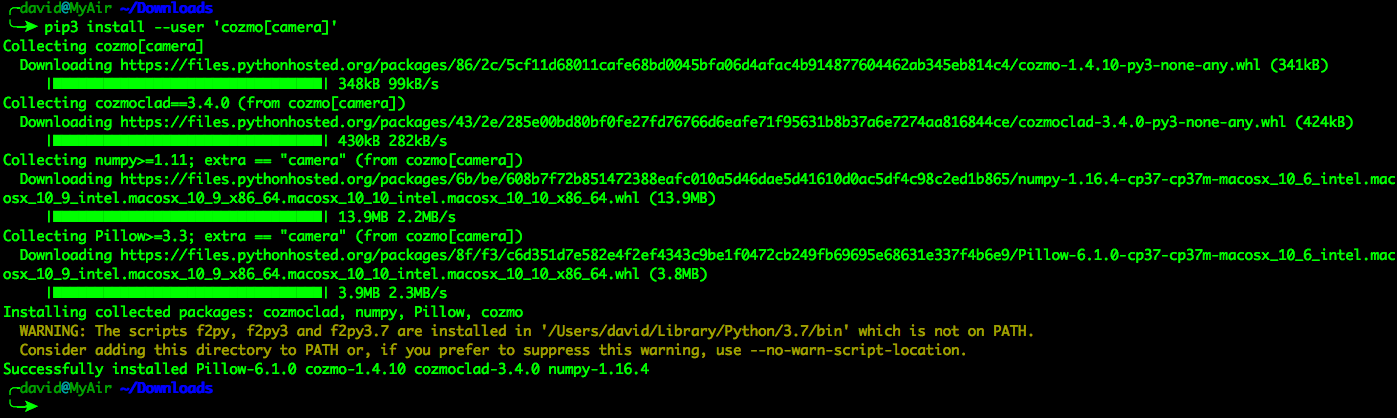
- 提示安装成功:
Pillow-6.1.0、cozmo-1.4.10、cozmoclad-3.4.0、numpy-1.16.4
4.2.1.3. SDK Upgrade
# 输入如下命令升级 SDK
pip3 install --user --upgrade cozmo

- 提示当前 SDK 已经满足需求,忽略更新。
4.2.1.4. 手机驱动安装(补充步骤)
- 在 macOS 系统上运行 Cozmo SDK,iOS 设备不需要安装其他驱动。
- 而使用 Android 设备需要安装 Android Debug Bridge (adb) 才能运行 Cozmo SDK ,并且需要用 USB 线连接手机。
4.2.2. 安装 Pillow 模块
- 一般说来装
Cozmo SDK的时候已经自带了
pip3 install --user Pillow
4.2.3. 安装 Flask 模块
Flask是Python的 Web 应用框架,因为Cozmo Explorer Tool是浏览器应用,故必须安装
pip3 install --user flask

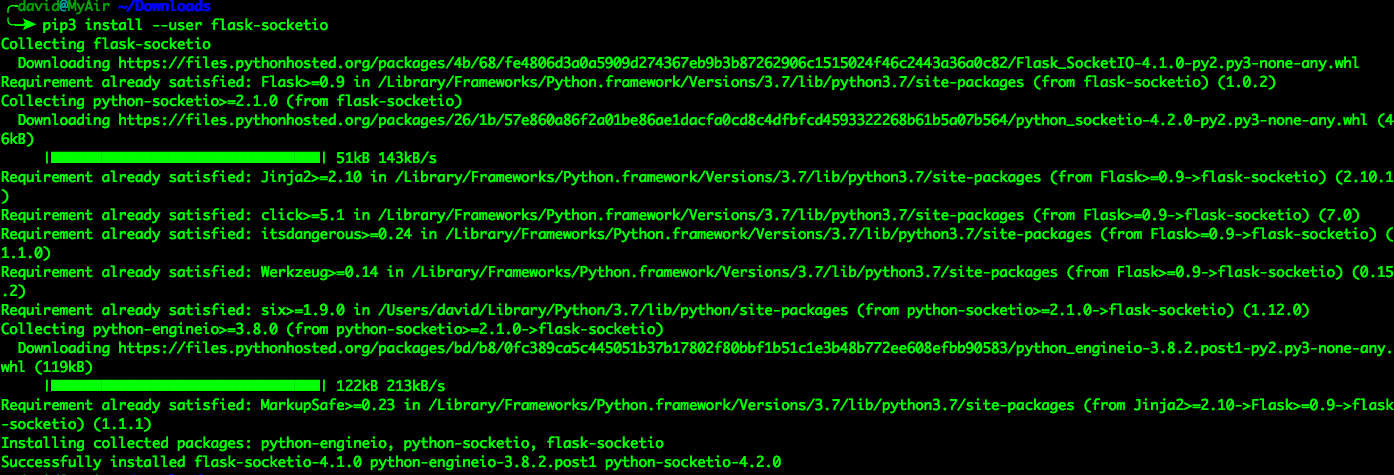
4.2.4. 安装 Flask Socket-IO 模块
pip3 install --user flask-socketio
原文链接:https://www.cnblogs.com/David-domain/p/11216603.html
5. 启动 Cozmo Explorer Tool
- 因为没有使用 venv 环境,所以直接运行即可
- 进入 Cozmo Explorer Tool 目录
cd Cozmo-Explorer-Tool
python3 explorer_tool.py
5.1. 报错 1
╭─david@MyAir ~/Cozmo-Explorer-Tool ‹master›
╰─➤ python3 explorer_tool.py 1 ↵
WARNING:root:Cannot import from eventlet: Do `pip3 install --user eventlet` to install
Event monitoring works, but performance is decreased
2019-07-20 09:21:42,886 cozmo.general WARNING No iOS device found running Cozmo: No connected iOS devices running Cozmo in SDK mode
WARNING:cozmo.general:No iOS device found running Cozmo: No connected iOS devices running Cozmo in SDK mode
2019-07-20 09:21:42,887 cozmo.general WARNING No Android device found running Cozmo: Failed to execute adb command adb: [Errno 2] No such file or directory: 'adb': 'adb'
WARNING:cozmo.general:No Android device found running Cozmo: Failed to execute adb command adb: [Errno 2] No such file or directory: 'adb': 'adb'
* Serving Flask app "explorer_tool" (lazy loading)
* Environment: production
WARNING: Do not use the development server in a production environment.
Use a production WSGI server instead.
* Debug mode: off
ERROR:flask.app:Exception on / [GET]
Traceback (most recent call last):
File "/Library/Frameworks/Python.framework/Versions/3.7/lib/python3.7/site-packages/flask/app.py", line 2292, in wsgi_app
response = self.full_dispatch_request()
File "/Library/Frameworks/Python.framework/Versions/3.7/lib/python3.7/site-packages/flask/app.py", line 1815, in full_dispatch_request
rv = self.handle_user_exception(e)
File "/Library/Frameworks/Python.framework/Versions/3.7/lib/python3.7/site-packages/flask/app.py", line 1718, in handle_user_exception
reraise(exc_type, exc_value, tb)
File "/Library/Frameworks/Python.framework/Versions/3.7/lib/python3.7/site-packages/flask/_compat.py", line 35, in reraise
raise value
File "/Library/Frameworks/Python.framework/Versions/3.7/lib/python3.7/site-packages/flask/app.py", line 1813, in full_dispatch_request
rv = self.dispatch_request()
File "/Library/Frameworks/Python.framework/Versions/3.7/lib/python3.7/site-packages/flask/app.py", line 1799, in dispatch_request
return self.view_functions[rule.endpoint](**req.view_args)
File "explorer_tool.py", line 89, in index
return render_template('index.html', randomID=rndID, animations=lists[0], triggers=lists[1], behaviors=lists[2], hasSocketIO=flask_socketio_installed, hasPillow=active_viewer)
IndexError: list index out of range
- 提示中有
pip3 install --user eventlet,说明安装依赖中还有一个包要安装,docs 中没有提及
pip3 install --user eventlet
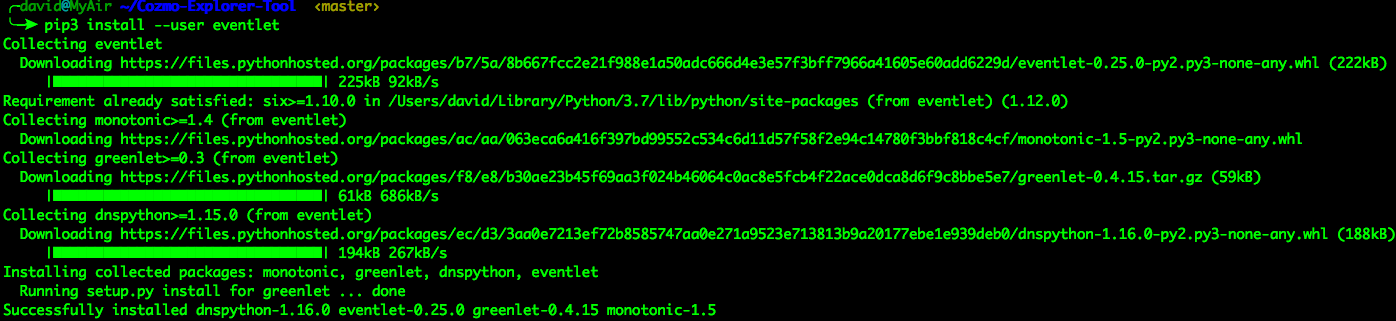
- 提示安装完成
5.2. 再次启动,弹出一个网页显示 500
- 页面500,emmmm~~~,什么情况?

5.3. 查看目录中 README
System requirements
-
- PC with Windows OS, mac OSX or Linux
- Python 3.5.1 or later
- WiFi connection
- An iOS or Android mobile device with the Cozmo app installed, connected to the PC via USB cable
- 最后一条提示要用 USB 线连接手机和电脑
- 之后呢?拜托一口气说完好不好~~~
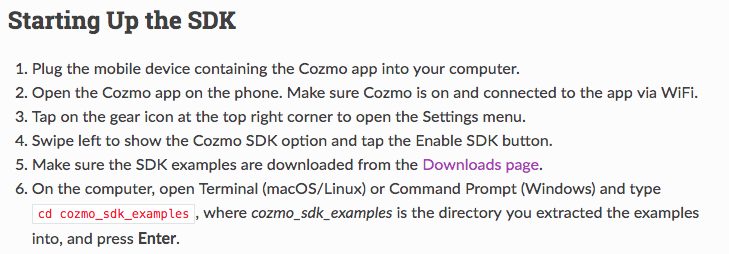
- 再次查看 docs,Starting Up the SDK
- 终于找到了
- 手机连接 Cozmo Wi-Fi后,用 App 连接 Cozmo
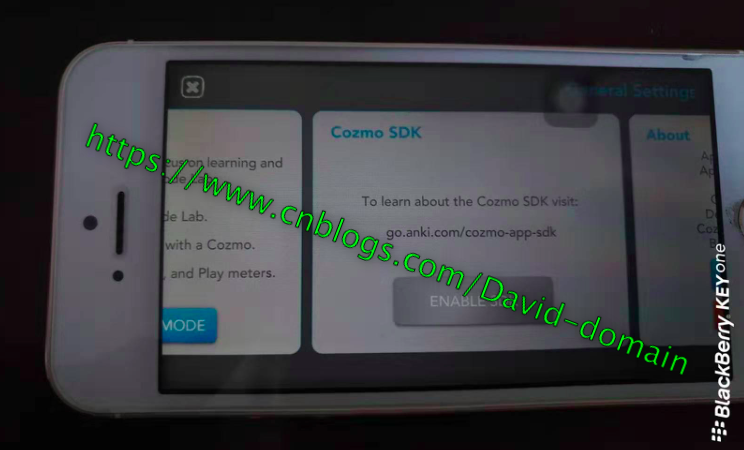
- 点击右上角的⚙️设置菜单
- 开启 SDK 功能
- 最后运行
explorer_tool.py 注意window环境地址是http://127.0.0.1:5000/ ,不是 http://0.0.0.0:5000
- 点击开启 SDK 模式
- 进入 SDK 模式后
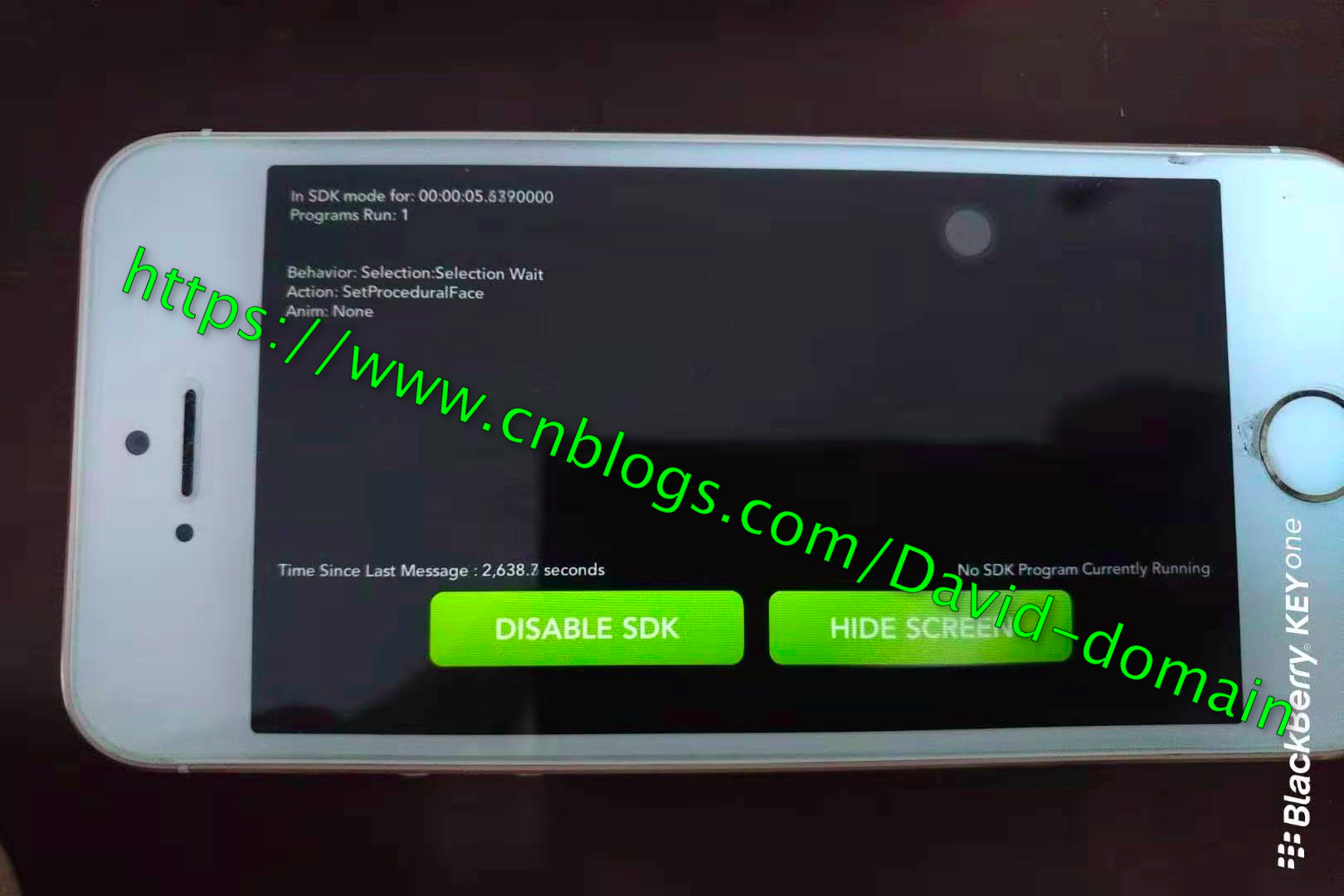
- 接下来Cozmo 就傻傻的、迷惑的看着你,等待你下指令了
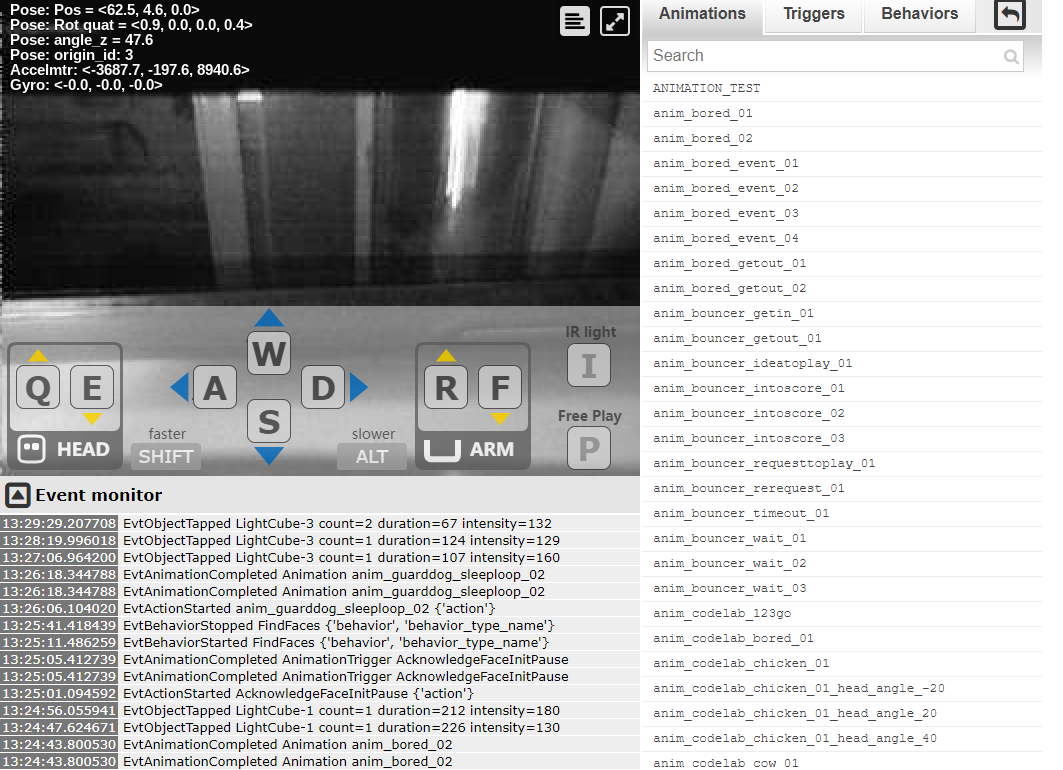
5.4. 启动 explorer_tool.py
- 重新运行,哈哈,页面正常打开 _
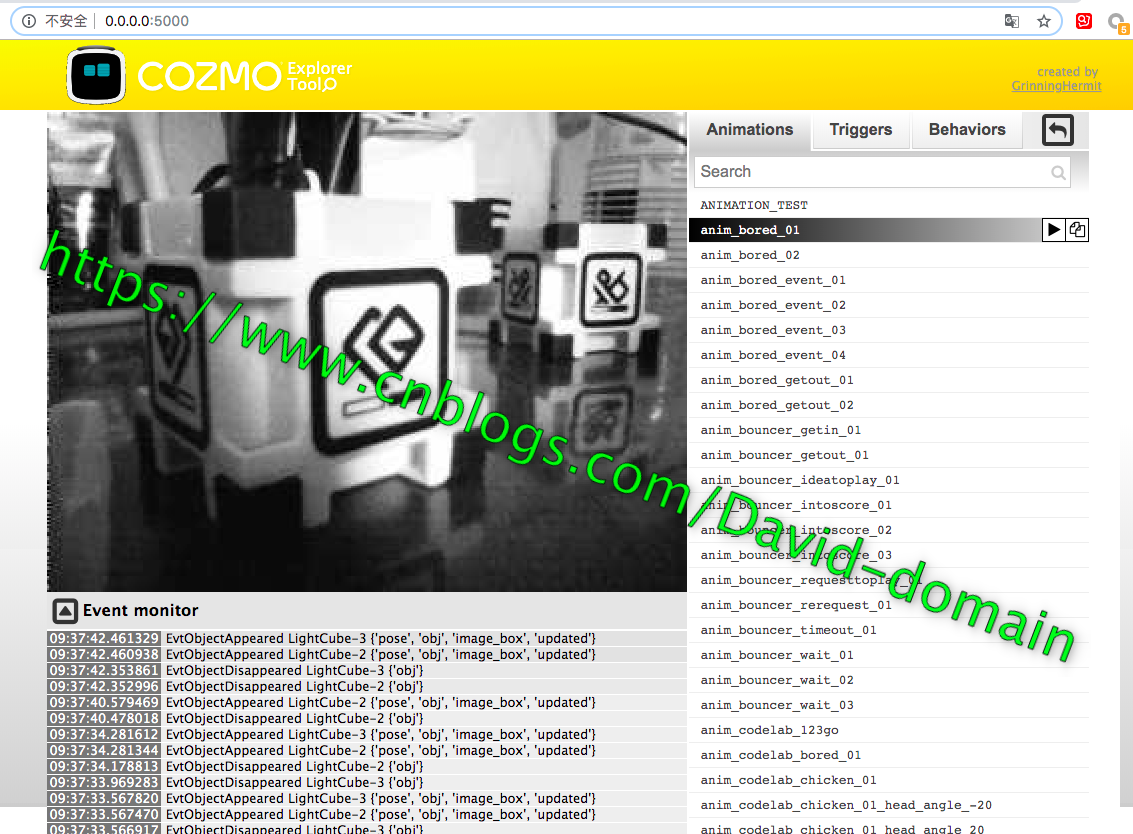
- Terminal 详细日志输出
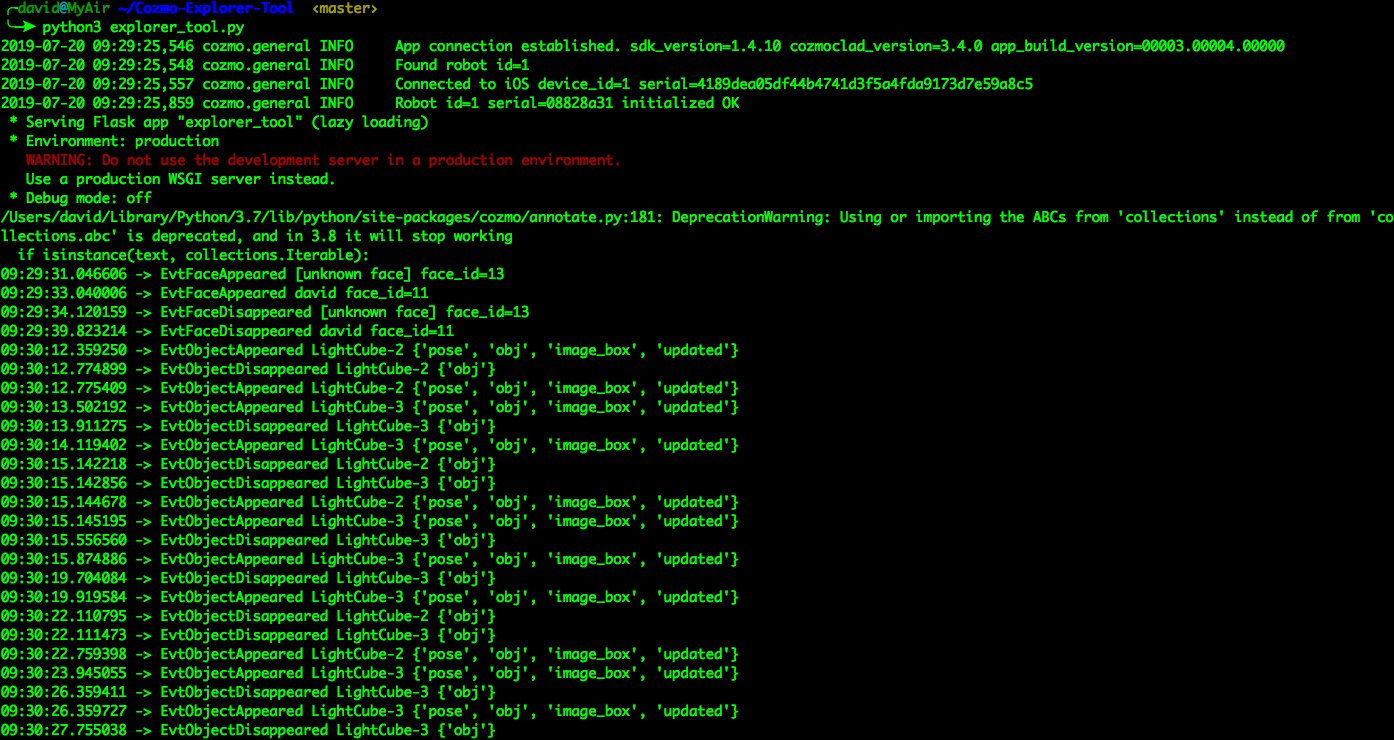
- 因为这种启动类似 run server 方式,所以后续操作日志还会持续不断的输出到 Terminal 中。
原文链接:https://www.cnblogs.com/David-domain/p/11216603.html
6. Python 开发 —— 远程控制及示例脚本运行
- 以上是 UI 工具安装过程,类似与一个调试界面,下面进入真正的 Python 开发部分
6.1. 项目 Anki Cozmo - Python SDK
- 手册中第二部分是 GitHub 项目地址:Anki Cozmo - Python SDK
- 下载完 SDK 案例,就可以准备进行 python 开发了
6.2. 下载 SDK Examples
- 点击手册中下载标签:SDK Examples
- 第一部分是 SDK 案例,有 Mac OSX / Linux 和 Windows 版本。
6.3. 查看 SDK Examples 内容
╭─david@MyAir ~/Downloads/cozmo_sdk_examples_1.4.10
╰─➤ ll
total 32
-rw-r--r--@ 1 david staff 10K 3 13 04:32 LICENSE.txt
-rw-r--r--@ 1 david staff 676B 3 13 04:32 README.md
drwxr-xr-x@ 10 david staff 320B 3 13 04:32 apps
drwxr-xr-x@ 7 david staff 224B 3 13 04:32 face_images
drwxr-xr-x@ 7 david staff 224B 3 13 04:32 if_this_then_that
drwxr-xr-x@ 4 david staff 128B 7 20 13:27 lib
drwxr-xr-x@ 4 david staff 128B 3 13 04:32 multi_robot
drwxr-xr-x@ 3 david staff 96B 3 13 04:32 tools
drwxr-xr-x@ 8 david staff 256B 3 13 04:32 tutorials
╭─david@MyAir ~/Downloads/cozmo_sdk_examples_1.4.10
╰─➤ tree -Cl .
.
|-- LICENSE.txt
|-- README.md
|-- apps
| |-- 3d_viewer.py
| |-- cli.py
| |-- color_finder.py
| |-- desk_security_guard.py
| |-- quick_tap.py
| |-- quiz_questions.json
| |-- quizmaster_cozmo.py
| `-- remote_control_cozmo.py
|-- face_images
| |-- cozmosdk.png
| |-- hello_world.png
| |-- ifttt_gmail.png
| |-- ifttt_sports.png
| `-- ifttt_stocks.png
|-- if_this_then_that
| |-- common
| | `-- __init__.py
| |-- ifttt_gmail.py
| |-- ifttt_sports.py
| |-- ifttt_sports_flask.py
| `-- ifttt_stocks.py
|-- lib
| `-- flask_helpers.py
|-- multi_robot
| |-- multi_robot_independent.py
| `-- multi_robot_unified.py
|-- tools
| `-- cubes
| |-- auto_cube_disconnect.py
| |-- connect_cubes.py
| |-- disconnect_cubes.py
| `-- log_cube_battery_levels.py
`-- tutorials
|-- 01_basics
| |-- 01_hello_world.py
| |-- 02_drive_and_turn.py
| |-- 03_count.py
| |-- 04_drive_square.py
| |-- 05_motors.py
| |-- 06_sing_scales.py
| |-- 07_backpack_lights.py
| |-- 08_animation.py
| |-- 09_cube_lights.py
| |-- 10_play_sound.py
| |-- 11_play_song.py
| `-- 12_random_animation.py
|-- 02_cozmo_face
| |-- 01_cozmo_face_image.py
| |-- 02_cozmo_face_mirror.py
| `-- 03_alarm_clock.py
|-- 03_vision
| |-- 01_light_when_face.py
| |-- 02_face_follower.py
| |-- 03_annotate.py
| `-- 04_exposure.py
|-- 04_cubes_and_objects
| |-- 01_go_to_pose_test.py
| |-- 02_create_wall.py
| |-- 03_go_to_object_test.py
| |-- 04_stack_or_roll.py
| |-- 05_cube_stack.py
| |-- 06_pickup_furthest.py
| |-- 07_lookaround.py
| |-- 08_drive_to_charger_test.py
| |-- 09_custom_objects.py
| |-- 10_object_moved.py
| |-- 11_dock_with_cube.py
| |-- 12_roll_cube.py
| `-- 13_pop_a_wheelie.py
|-- 05_async_python
| |-- 01_cube_blinker_sync.py
| `-- 02_cube_blinker.py
`-- 06_actions
`-- 01_parallel_actions.py
15 directories, 62 files
- 因为梯子故障,docs 里的视频链接无法观看,所以只能自己摸索
- tree 目录后,看到 lib 库中有一个
flask_helper.py的文件,通过刚才Cozmo Explorer Tool的调试,我们能知道 Cozmo 使用 flask 框架做的 web 。所以,这个应该也是有 flask web 界面的。
6.4. 离成功不远了
- 打开
flask_helper.py文件,可以看到顶部注释部分有一个说明
Flask is a Python web framework. remote_control_cozmo.py and other scripts may use
these utility functions to interact with a web browser.
-
我们看到了什么?
-
你说对了!——
remote_control_cozmo.py -
find一下
╭─david@MyAir ~/Downloads/cozmo_sdk_examples_1.4.10
╰─➤ find ./* -name "remote_control_cozmo.py"
./apps/remote_control_cozmo.py
6.5. 启动远程控制—— remote_control_cozmo.py
╭─david@MyAir ~/Downloads/cozmo_sdk_examples_1.4.10
╰─➤ python3 apps/remote_control_cozmo.py
Traceback (most recent call last):
File "apps/remote_control_cozmo.py", line 29, in <module>
import flask_helpers
ModuleNotFoundError: No module named 'flask_helpers'
- what the fuck? 发生了什么?
- 没找到
flask_helpers模块。你觉得在哪?是的,flask_helper.py文件中 - so,切换到
lib目录中
╭─david@MyAir ~/Downloads/cozmo_sdk_examples_1.4.10
╰─➤ cd lib 1 ↵
╭─david@MyAir ~/Downloads/cozmo_sdk_examples_1.4.10/lib
╰─➤ python3 ../apps/remote_control_cozmo.py
2019-07-20 13:27:29,093 cozmo.general WARNING No iOS device found running Cozmo: No connected iOS devices running Cozmo in SDK mode
2019-07-20 13:27:29,095 cozmo.general WARNING No Android device found running Cozmo: Failed to execute adb command adb: [Errno 2] No such file or directory: 'adb': 'adb'
A connection error occurred: No devices connected running Cozmo in SDK mode
- 好吧,你赢了,还是需要用手机连接,开启 SDK 模式
- so,念咒:天灵灵,地灵灵,太上老君急急如律令,变~变~变~
- 屏幕白光一闪,已经打开了一个神奇的页面
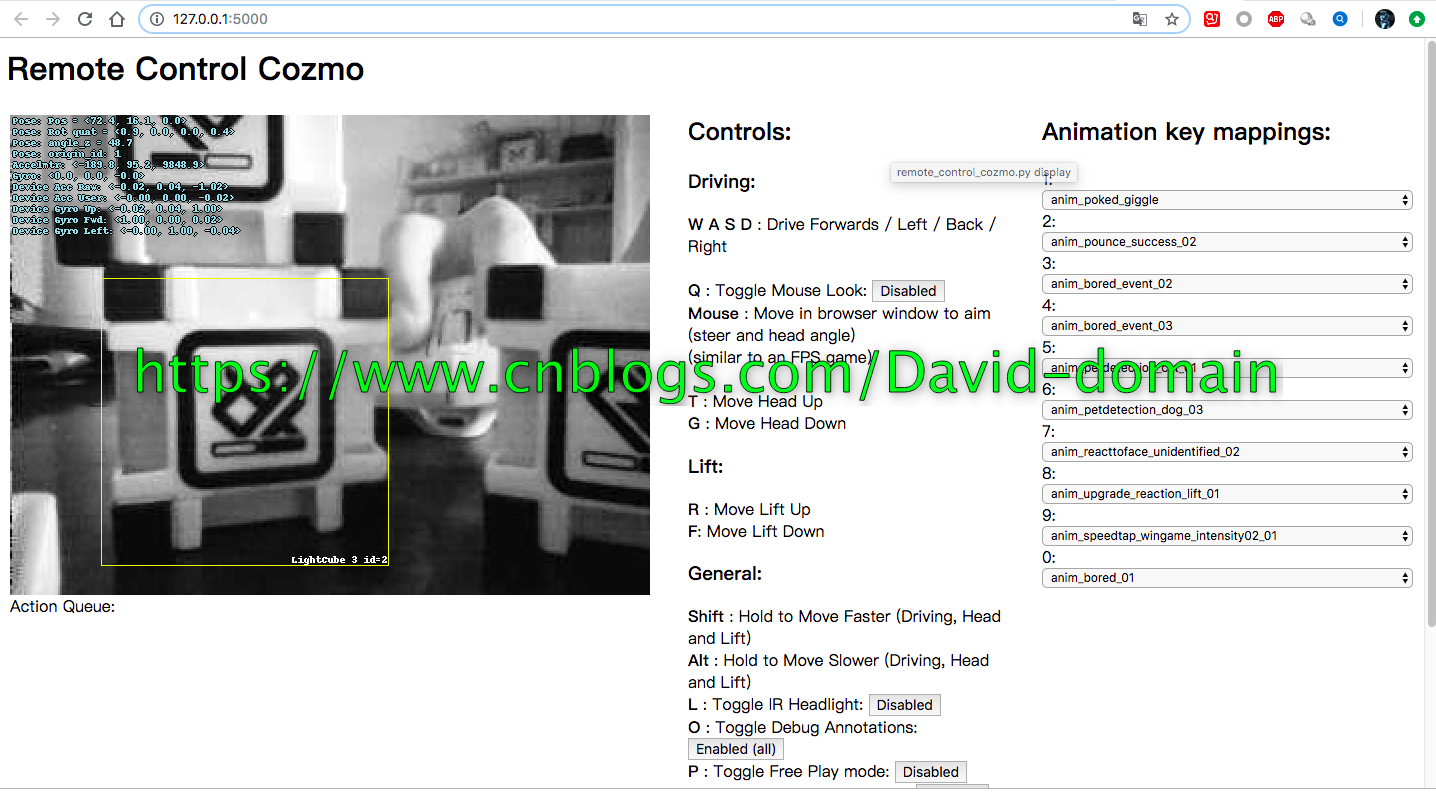
- 看到这简(lián)洁(jià)的布局,各位看官就知道我已经成功了????
- 让我们再来看一下 Terminal 中的输出
╭─david@MyAir ~/Downloads/cozmo_sdk_examples_1.4.10/lib
╰─➤ python3 ../apps/remote_control_cozmo.py 1 ↵
2019-07-20 13:33:24,416 cozmo.general INFO App connection established. sdk_version=1.4.10 cozmoclad_version=3.4.0 app_build_version=00003.00004.00000
2019-07-20 13:33:24,417 cozmo.general INFO Found robot id=1
2019-07-20 13:33:24,427 cozmo.general INFO Connected to iOS device_id=4 serial=4189dea05df44b4741d3f5a4fda9173d7e59a8c5
2019-07-20 13:33:24,726 cozmo.general INFO Robot id=1 serial=08828a31 initialized OK
* Serving Flask app "remote_control_cozmo" (lazy loading)
* Environment: production
WARNING: Do not use the development server in a production environment.
Use a production WSGI server instead.
* Debug mode: off
/Users/david/Library/Python/3.7/lib/python/site-packages/cozmo/annotate.py:181: DeprecationWarning: Using or importing the ABCs from 'collections' instead of from 'collections.abc' is deprecated, and in 3.8 it will stop working
if isinstance(text, collections.Iterable):
原文链接:https://www.cnblogs.com/David-domain/p/11216603.html
7. 执行示例脚本
CTRL+C退出 flask,保持 SDK 模式连接不中断- 以下是实例脚本运行效果????
7.1. 执行 tutorials/01_basics/ 脚本
| 文件 | 动作 |
|---|---|
| 01_hello_world.py | 喊出“Hello World” |
| 02_drive_and_turn.py | 前进一段距离后,左转 |
| 03_count.py | 数数,从 1 数到 5 |
| 04_drive_square.py | 左转4次,走一个正方形 |
| 05_motors.py | 升级机械臂 |
| 06_sing_scales.py | 从 1 数到 10,并步进升起机械臂 |
| 07_backpack_lights.py | Cozmo 顶部的灯循环变色 |
| 08_animation.py | 做 3个动作 |
| 09_cube_lights.py | 魔方显示不同颜色的灯光 |
| 10_play_sound.py | Cozmo 唱歌 |
| 11_play_song.py | 手机播放音乐 |
| 12_random_animation.py | Cozmo 做 6 个随机动作 |
7.2. 执行 tutorials/02_cozmo_face/ 脚本
| 文件 | 动作 |
|---|---|
| 01_cozmo_face_image.py | Cozmo 抬头,屏幕循环输出"WELCOME TO THE COZMO SDK" 和 “HELLO WORLD” |
| 02_cozmo_face_mirror.py | Cozmo 抬头,模仿镜子,屏幕显示它看到的画面 |
| 03_alarm_clock.py 15:30 | Cozmo 抬头,设置闹钟,传参 15:30,到时后会说“Wake up lazy human! It's time xxxx” |
7.3. 执行 tutorials/03_vision/ 脚本
| 文件 | 动作 |
|---|---|
| 01_light_when_face.py | 人脸识别。打开一个窗口,显示 Cozmo 看到的实时的图像。 |
| 02_face_follower.py | 人脸跟踪。打开一个窗口,显示 Cozmo 看到的实时的图像。如果人脸移动,Cozmo 也会向相同方向转向。 |
| 03_annotate.py | 显示一个图形用户界面窗口,显示带注释的相机视图。 |
| 04_exposure.py | 演示Cozmo相机的手动和自动曝光设置。 |
7.4. 执行 tutorials/04_cubes_and_objects/ 脚本
| 文件 | 动作 | 说明 |
|---|---|---|
| 01_go_to_pose_test.py | Cozmo 向左前方45度方向前进一段距离 | |
| 02_create_wall.py | 演示 Cozmo 绕过障碍物 | 需要执行 pip3 install --user 'cozmo[3dviewer]',否则找不到 OpenGL 模块 |
| 03_go_to_object_test | Cozmo 环顾四周找到魔方,并向魔方移动 | |
| 04_stack_or_roll.py | Cozmo 四处看看,然后等他看到一定数量的物体,将执行不同的操作。 | |
| 05_cube_stack.py | Como 把第一个看到的魔方放在第二个上 | |
| 06_pickup_furthest.py | Cozmo 找到一个魔方,把它举起来,并打开一个窗口,显示Cozmo 的识别过程 | |
| 07_lookaround.py | Cozmo 环顾四周,拿起并放下一个立方体。举起来后,Cozmo 会高兴的大笑。 | |
| 08_drive_to_charger_test | Cozmo 环顾四周,寻找充电器,并向它移动 | 好像识别不到充电器,哈哈哈???? |
| 09_custom_objects.py | 演示如何定义自定义对象。 | |
| 10_object_moved.py | 演示跟踪Cozmo检测到立方体正在移动的时间。 | |
| 11_dock_with_cube.py | 在 Cozmo 正前方放一个魔方,Cozmo 与魔方对接 | |
| 12_roll_cube.py | 在 Cozmo 正前方放一个魔方,Cozmo 回去滚动魔方 | |
| 13_pop_a_wheelie.py | 在 Cozmo 正前方放一个魔方,Cozmo 通过机械臂和旋转,背靠在魔方上 |
7.5. 执行 tutorials/05_async_python/ 脚本
| 文件 | 动作 | 说明 |
|---|---|---|
| 01_cube_blinker_sync.py | Cozmo 先四处寻找一个立方体。一旦找到一个,魔方的灯呈圆形闪烁绿色,人点击魔方后退出。 | 同步案例 |
| 02_cube_blinker.py | Cozmo 先四处寻找一个立方体。一旦找到一个,魔方的灯呈圆形闪烁绿色,人点击魔方后退出。 | 异步案例 |
- 没发现有太大区别,哈哈
7.6. 执行 tutorials/06_actions/ 脚本
| 文件 | 动作 |
|---|---|
| 01_parallel_actions.py | Cozmo 前进、升降机械臂并行进行 |
原文链接:https://www.cnblogs.com/David-domain/p/11216603.html
8. 用 IDE 开发 Cozmo Python 程序
8.1. 写在前面重要的话
The usbmuxd (USB Multiplexor Daemon) must be installed on any computer system paired with an iOS device before running any programs. Installing iTunes will also install the usbmuxd on those systems. Linux users can install the usbmuxd module through the command line with sudo apt-get install usbmuxd.
- usbmuxd(USB 多路复用器守护程序)必须在连接 iOS设备的电脑上安装。安装iTunes会附带安装上
usbmuxd。 - 官网:http://www.libimobiledevice.org/
- Linux 用户需要通过
sudo apt-get install usbmuxd命令安装。
Make sure adb (Android Debug Bridge) is installed on your system prior to running a program with an Android device. See the Install page for instructions.
- 在使用Android设备运行程序之前,请确保在系统上安装了ADB。
8.2. 开始码代码
- 现在,我们可以在 Cozmo 上运行 Python 程序了。接下来我们将讨论如何编辑上面的代码,使 Cozmo 说些新的东西。让我们编写第一个程序。
8.3. 编写 “say 晚安” 程序
8.3.1. 拷贝 01_hello_world.py 重命名为 nightnight.py
cd cozmo_sdk_examples_1.4.10/tutorials/01_basics/
cp 01_hello_world.py nightnight.py
8.3.2. 使用 IDE 或文本编辑器打开 nightnight.py
8.3.3. 对每行内容进行说明
#!/usr/bin/env python3
# Copyright (c) 2016 Anki, Inc.
#
# Licensed under the Apache License, Version 2.0 (the "License");
# you may not use this file except in compliance with the License.
# You may obtain a copy of the License in the file LICENSE.txt or at
#
# http://www.apache.org/licenses/LICENSE-2.0
#
# Unless required by applicable law or agreed to in writing, software
# distributed under the License is distributed on an "AS IS" BASIS,
# WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied.
# See the License for the specific language governing permissions and
# limitations under the License.
'''Hello World
Make Cozmo say 'Hello World' in this simple Cozmo SDK example program.
'''
import cozmo # 导入 cozmo SDK 包
def cozmo_program(robot: cozmo.robot.Robot):
robot.say_text("Hello World").wait_for_completed()
'''
robot.say_text(…) 表示要让 Cozmo 大声说出一段文本内容
"Hello World" 是 Cozmo 要说的内容
wait_for_completed() 表示要让 Cozmo 说完这段文本后才执行写下一行代码,如果没有这句,Cozmo 不会说出任何内容就停止了
'''
cozmo.run_program(cozmo_program)
8.3.4. 修改文本内容
import cozmo
def cozmo_program(robot: cozmo.robot.Robot):
robot.say_text("Night Night").wait_for_completed()
cozmo.run_program(cozmo_program)
8.3.5. 保存并执行
./nightnight.py
- 如果正确执行,Cozmo 会说出新的短语。
8.4. 后续开发建议
-
既然我们已经编写了自己的 CozMo程序,那么可以看一下 CozMo SDK 的其余部分以及其他许多示例程序,以获得更多的想法。
-
Cozmo SDK 中的 API,可以在http://cozmosdk.anki.com/docs/api.html找到。里面包括了所有组件、动作、事件,参考示例程序,我相信各位看官一定能开发出非常 geek 的程序。
原文链接:https://www.cnblogs.com/David-domain/p/11216603.html
9. 后记
-
文章就暂时到此为止了,各位看官感兴趣的话,可以自己淘来一个 Cozmo 或者 Vector 来实现自己的奇思妙想,比如私人助理、表白小助手、室内巡逻员、足球运动员等等

-
更多资源可以访问如下站点
- 官网:https://www.anki.com
- 开发者站点:https://developer.anki.com/
- 论坛:https://forums.anki.com
- API:http://cozmosdk.anki.com/docs/api.html
最后
以上就是呆萌飞机最近收集整理的关于Cozmo机器人使用1. 入坑始末2. 启动 Cozmo3. 开始鼓捣4. 开发环境搭建——Cozmo Explorer Tool 安装4.1. 下载4.2. 安装依赖5. 启动 Cozmo Explorer Tool5.4. 启动 explorer_tool.py6. Python 开发 —— 远程控制及示例脚本运行7. 执行示例脚本8. 用 IDE 开发 Cozmo Python 程序9. 后记的全部内容,更多相关Cozmo机器人使用1.内容请搜索靠谱客的其他文章。








发表评论 取消回复