机械人开发四--ROS常用概念与Launch文件
- 一、ROS常用概念
- 1.1 ROS 的结构
- 1.2 ROS 话题通信
- 1.3 海龟仿真器 仿真 例程
- 二、Launch文件
- 2.1 功能
- 2.2 文件语法
- 2.3 参数服务器
- 2.4 节点分组与重命名标签
一、ROS常用概念
1.1 ROS 的结构
ROS 中有一些很重要的基础概念:节点,节点管理器,工作空间,功能包等,知道这些基础概念对后续的 ROS 的学习和理解会有很大的帮助。工作空间 和 功能包 上一节一节讲过了,这里讲一下节点 与 节点管理器。
节点(node):在ROS机械人中,每一个功能由每一个结点实现,而每个 节点 则对应功能包中的 一个可执行文件。节点管理器(master):报告结点的注册信息,通过节点管理器,可以让节点和节点之间建立起联系。只有通过节点管理器注册,才能实现后续的节点间的通信。
1.2 ROS 话题通信
话题通信是ROS节点中最常用的通信方式。
话题的概念(topic):节点可以发布消息到话题,也可以从话题订阅消息,一个节点可以订阅和发布多个话题。消息(message):一个 ROS 数据类型,节点之间通过话题承载的消息来互相通信。
① 发布者
其部分C++实现代码如下:

代码意思是 创建一个名为“test_info_pub”的发布者,发布一个名为“/pub_name”的话题,话题的消息类型为“topic::type”,消息的队列长度为 20。在创建完发布者后,我们需要实体化发布者发送的数据类型。如下图所示:
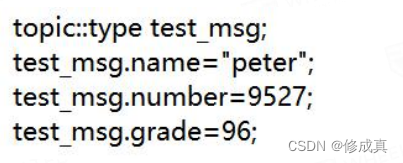
创建消息数据后将数据以消息结构的形式发送出去,如下图所示:

② 订阅者
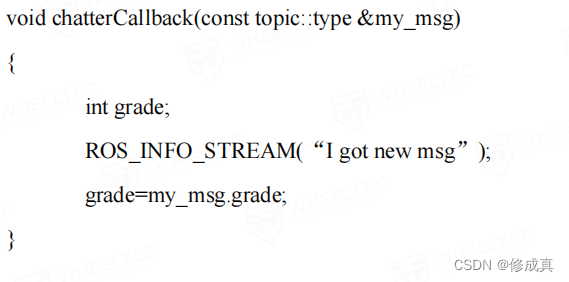
在发布者将消息发布出来之后,订阅者需要通过订阅话题去订阅发布者发布的信息,代码如下:

创建一个订阅者,订阅名为“/pub_name”的话题,队列长度20,注册回调函数“callback”。当接收到消息后调用回调函数进行处理接收的消息。如下图所示:
1.3 海龟仿真器 仿真 例程
① 输入 roscore 启动 ROS
roscore 随后会启动 节点管理器,节点管理器负责 ros 的节点注册,参数服务器,话题通信管理等等。
book@100ask:~$ roscore
程序运行
② 重新打开一个命令窗口,输入命令 rostopic list 查看节点列表
rostopic list
可以看到 跟随roscore一起启动的“/rosout”和“/rosout_agg”两个系统话题

③ 使用 rosrun 命令运行一个节点
rosrun turtlesim turtlesim_node
可以看到出现了一个海龟

④ 再开一个命令窗口,输入控制海龟运动的节点。
rosrun turtlesim turtle_teleop_key
这时你就可以通过键盘的↑↓←→控制海龟运动了
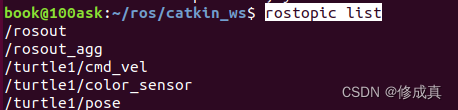
⑤ 随后在打开一个命令窗口,输入 rostopic list 命令。
rostopic list
可以看到对比之前多了/turtle1/cmd_vel,/turtle1/color_sensor,/turtle1/pose,这三个话题。
其分别对应 键盘控制节点的话题通信、海龟仿真器的颜色话题、海龟的位姿话题。
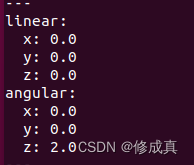
⑥ 输入命令分别查看相应的话题内容,命令如下:
rostopic echo /turtle1/cmd_vel
rostopic echo /turtle1/color_sensor
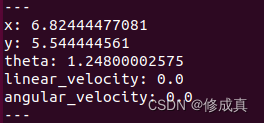
rostopic echo /turtle1/pose

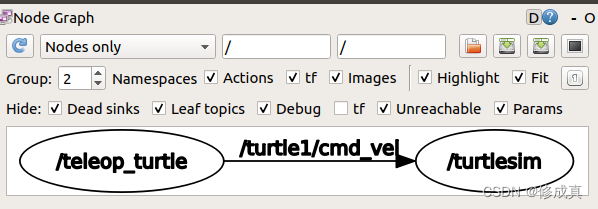
⑦ 输入命令查看当前运行的话题,以及显示该话题的发布者和订阅者。
rosrun rqt_graph rqt_graph
窗口内显示当前运行的话题,可以看到话题名是/turtle1/cmd_vel,话题的发布者是“/teleop_turtle”,
话题的订阅者是“/turtlesim”。
二、Launch文件
2.1 功能
launch 路径下包含的是.launch 文件,launch 文件里面封装好了要运行的节点,写入的参数,加载的参数文件等等。
在前面运行海龟仿真器的例程时用到的都是 rosrun 命令,rosrun 命令每次只能运行一个节点,但是当运行一个机器人时要同时运行多个节点就需要用到 roslaunch 了,roslaunch 命令运行一个 launch 文件,一个 luanch 文件可以包多个节点。
文件的指令的结构是:
roslaunch 功能包名 launch文件名。
运行 roslaunch 命令时,会自动检测是否开启了 roscore,如果没有开启则自动开启 roscore。
其官方网址如下:
roslaunch
2.2 文件语法
语法为标签语言,具体列表如下:
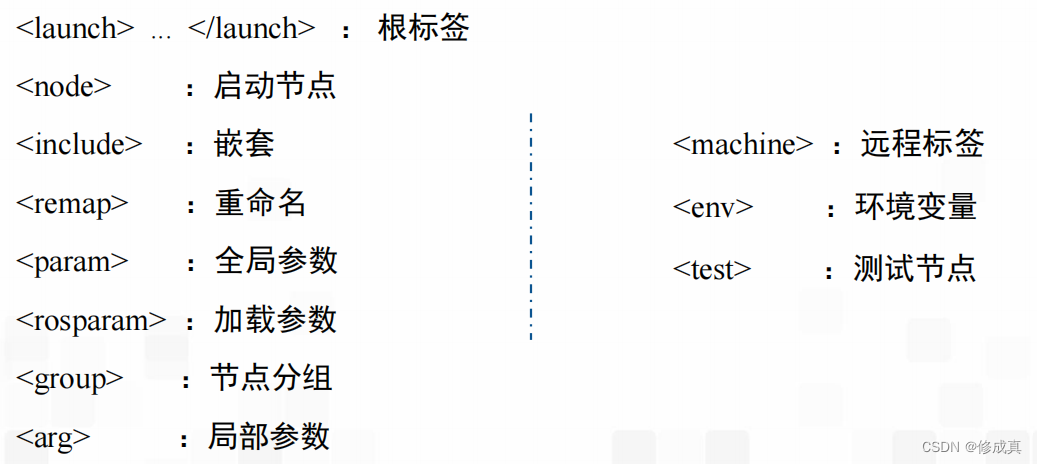
launch 文件中的根元素采用 <launch> 标签定义,文件中的其他内容都必须包含在这个标签之中。如下:
<launch>
……
……
</launch>
启动 ROS 系统的核心是启动 ROS 节点,采用<node>标签定义,用法如下:
<node name="map_server_for_test" pkg="map_server" type="map_server" />
启动一个节点至少需要三个属性:name、pkg 和 type。
name:属性定义节点运行的名称,可自定义;pkg:属性定义节点所在的功能包名称;type:属性定义节点的可执行文件名称,也可以是.py 文件;
除了这三个标签属性外,另外还有一些其他的元素,例如:<param>、<arg>。这两个的作用都是写入参数,但是
param 是 ROS 系统运行中的参数,存储在参数服务器中。在 launch 文件中可以通过<param>标签加载 param。
launch 文件执行后,param 就加载到 ROS 的参数服务器上了。
arg 标签用来在 launch 文件中定义参数,arg 不储存在参数服务器中,不能提供给节点使用,只能在 launch 文件中使用。
<node>标签的属性列表如下:
| 属性 | 作用 |
|---|---|
| pkg | 节点所在的包名 |
| type | 可执行文件名 |
| name | 重定义节点名 |
| args | 传递参数 |
| output | 日志输出(log|screen) |
| respawn | “true”,如果节点失效则重启(默认是false) |
| required | “true”,如果节点失效则关闭整个launch文件(默认不设置) |
| ns | 在命名空间中运行此节点 |
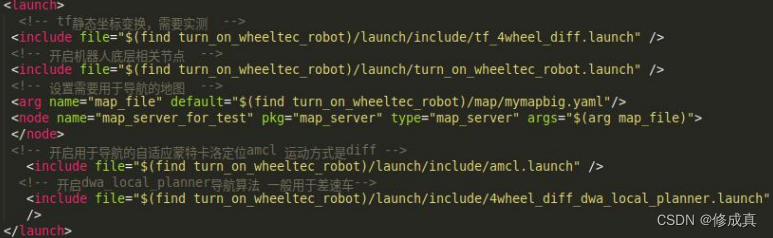
launch 文件夹里面还有一个 inculde 文件夹,这个文件夹主要是存放一些被其他 launch 文件调用的 launch 文件 。如下图所示:
2.3 参数服务器
储存系统运行参数。使用命令和功能如下:
rosparam list: 列出参数服务器中的参数rosparam get: 获取参数rosparam set: 设置参数rosparam delete: 删除参数rosparam load: 从文件中加载参数到参数服务器rosparam dump: 将参数服务器的参数写入文件
2.4 节点分组与重命名标签
<group>:
使用 ① 将若干个节点划分进同一个命名空间
<group ns = “group_name”>
...
</group>
使用 ② 条件判断执行
<group if = “condition”>
...
</group>
<remap>:
<remap from = "/different_topic" to = "/needed_topic" />
到这里就结束啦!

最后
以上就是感动咖啡豆最近收集整理的关于【ROS】机械人开发四--ROS常用概念与Launch文件一、ROS常用概念二、Launch文件的全部内容,更多相关【ROS】机械人开发四--ROS常用概念与Launch文件一、ROS常用概念二、Launch文件内容请搜索靠谱客的其他文章。








发表评论 取消回复