在之前的一篇文章中,我简要介绍了车辆运动学模型的推导方法,得到了车辆的运动学模型,相关信息请移步
链接 :《无人驾驶车辆模型预测控制》之车辆运动学模型
在介绍基于运动学的模型预测控制的控制器设计之前,先来了解一下什么是模型预测控制?为什么要用模型预测控制?最后再阐述线性时变模型预测控制的基本框架。
注:文中部分理论知识参考陈虹老师的《模型预测控制》,感兴趣的同学可以自行翻阅。
什么是模型预测控制?
我们来看看下面这张图,
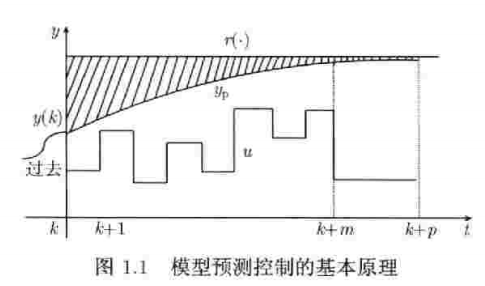
r(.)是目标系统轨迹,yp是预测的系统轨迹,y(k)是当前系统的观测量,u是控制,m是控制时域,p是预测时域。
对于这样一个离散系统(1.1),

模型预测控制就是,在当前时刻k,y(k)是预测系统状态的起点,来预测未来一段时间内系统的输出yp,我们控制的目的是将yp能够跟踪目标值r(.),也就是说,我们希望寻找最佳的控制输入使得预测的系统输出与期望的系统输出越接近越好。也就是图1.1中阴影部分的面积最小、为此我们可以定义预测测与目标值之间的偏差,同时考虑最佳的控制输入,建立一个满足控制约束和输出约束的二次型的成本函数,通过求解成本函数的解u,并将解的第一个值作用于系统,然后系统进入时刻k+1,同样根据k+1时刻的测量值y(k+1)作为初始条件重新预测系统未来输出,计算优化问题,再将优化解的第一个值作用于系统,如此往复直到k ->无穷。
简单的说,模型预测控制可以分为三步:
-1 根据当前系统的测量信息,预测系统未来的动态;//基于模型的预测
-2 求解优化问题;//在线滚动优化
-3 将优化解的第一个元素作用于系统。//反馈校正
为什么要用模型预测控制?
或者说它的优点:
- 1 模型预测控制能有效解决线性控制系统或非线性控制系统中的约束问题,包含控制约束、控制增量约束、控制输出约束等。
- 2 不同于离线的最优控制(如LQR),MPC不是采用一个不变的全局优化目标,而是采用时间向前滚动式的有限时域优化策略。这以意味着优化的过程不是一次离线进行,而是反复的在线进行的,且对于这种有限优化目标的局限性,使其在理想情况下得到的是次优解,但是这种在线滚动优化能顾及模型失配或干扰等引起的不确定性,及时进行弥补。
线性时变模型预测控制(LTI MPC)设计基本框架?
在什么是模型预测控制中,已经提到MPC包含三个部分,基于模型的预测;滚动优化;反馈控制。
基于这三个部分,简要介绍MPC设计的算法框架或步骤:
1. 基于模型的预测
- 1 分析动态系统,根据物理学理论建立系统微分方程(连续的系统)
- 2 由于大部分系统是非线性的,因此,我们对非线性系统进行线性化
- 3 MPC是求解离散系统的数值解,因此还需对线性化的系统进行离散化(离散化方法:前向欧拉法(关于前向欧拉法的介绍 请看此链接1和链接2))
- 4 确定预测时域和控制时域,推导预测模型
2. 滚动优化
- 1 根据输出与参考值之间的误差 和 控制输入建立成本函数cost function
- 2 将成本函数转换成标准的二次型形式,方便求解
- 3 建立约束
3. 反馈
- 将求得的优化解的第一个分量作用于系统。
至此,完成线性时变模型预测控制的答题框架。后面,基于以上理论,将设计基于运动学模型的模型预测控制的轨迹跟踪控制。
最后
以上就是野性宝贝最近收集整理的关于《无人驾驶车辆模型预测控制》之基于运动学的MPC设计(一)的全部内容,更多相关《无人驾驶车辆模型预测控制》之基于运动学内容请搜索靠谱客的其他文章。








发表评论 取消回复