本文研究Simulink Function子系统的用法和该模块生成的代码。
文章目录
- 1 问题引入
- 2 Simulink Function子系统建模
- 2.1 Simulink Function子系统
- 2.2 Function Caller模块
- 3 代码生成
- 3.1 默认配置
- 3.2 Function visibility配置
- 3.3 多个输出端口
- 3.4 输入和输出变量相同
- 3.5 参数为数组
- 3.6 参数为结构体
- 4 总结
1 问题引入
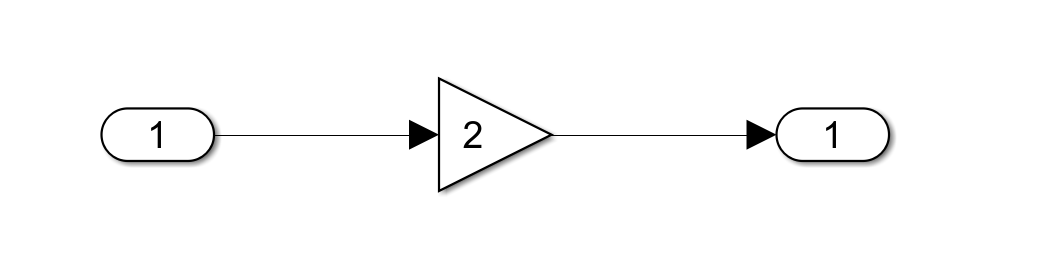
博主在其他的博客中研究了许多模块和子系统,以及它们生成的代码。通常来说,博主研究的方法是建立一个Inport,一个outport,以及两者之间的控制逻辑,譬如如下的Gain模块。
配置好该模型,并生成代码如下。
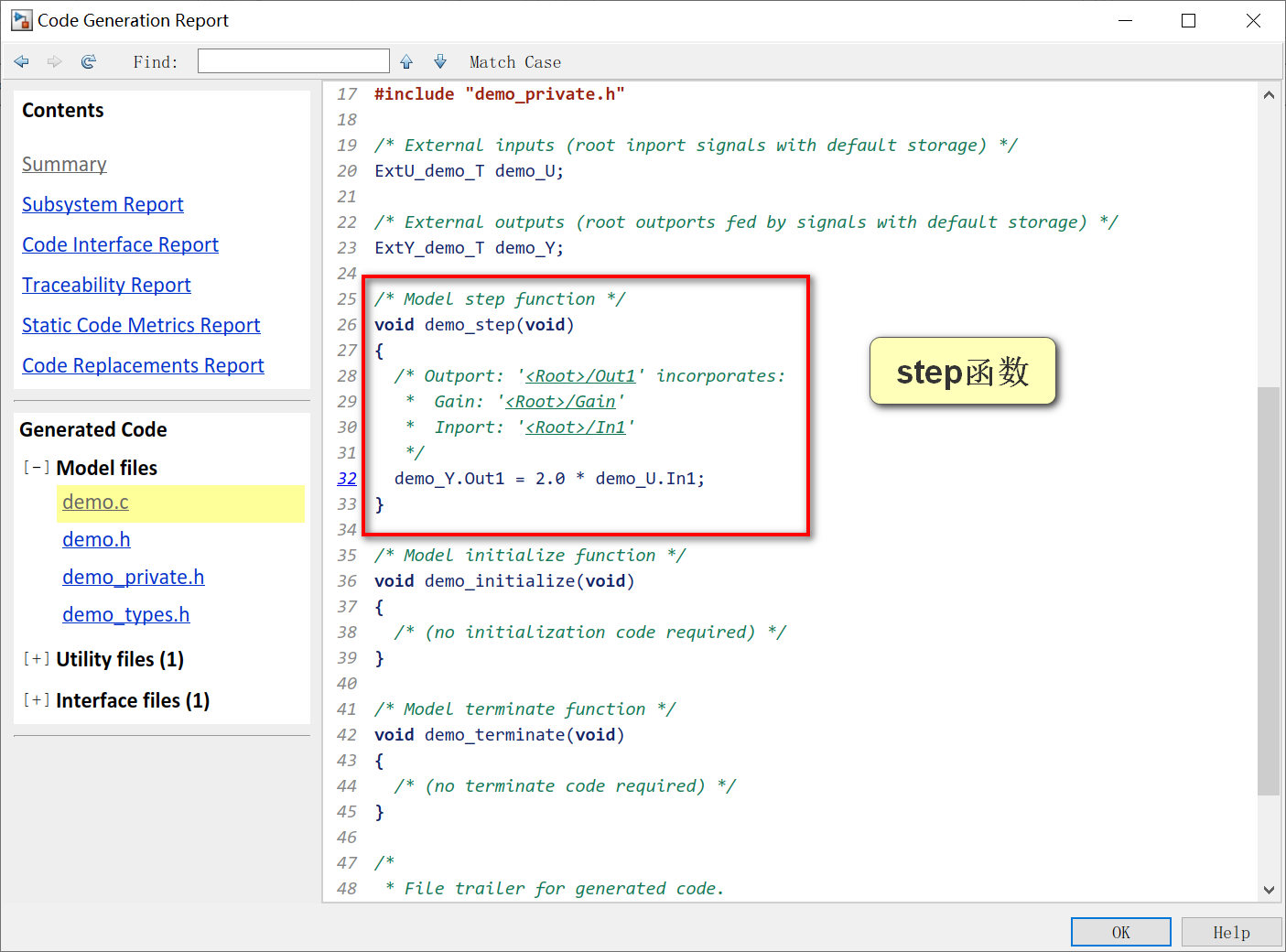
其中的step函数就可以反映出模型的算法,输入和输出都被定义为全局变量,而step函数的参数和返回值都是void。
博主最近遇到的项目需求是,需要生成带有非空参数的函数。也就是要把模型的inport作为函数的参数传入,outport作为函数的返回值。这样一来,以前的代码生成方案就无法使用了。经博主研究后,可以采用Simulink Function子系统,来实现这个需求。
2 Simulink Function子系统建模
本节研究一下Simulink Function子系统的建模。
2.1 Simulink Function子系统
1)首先,从Simulink Library中拖拽出一个Simulink Function子系统到空白模型中。
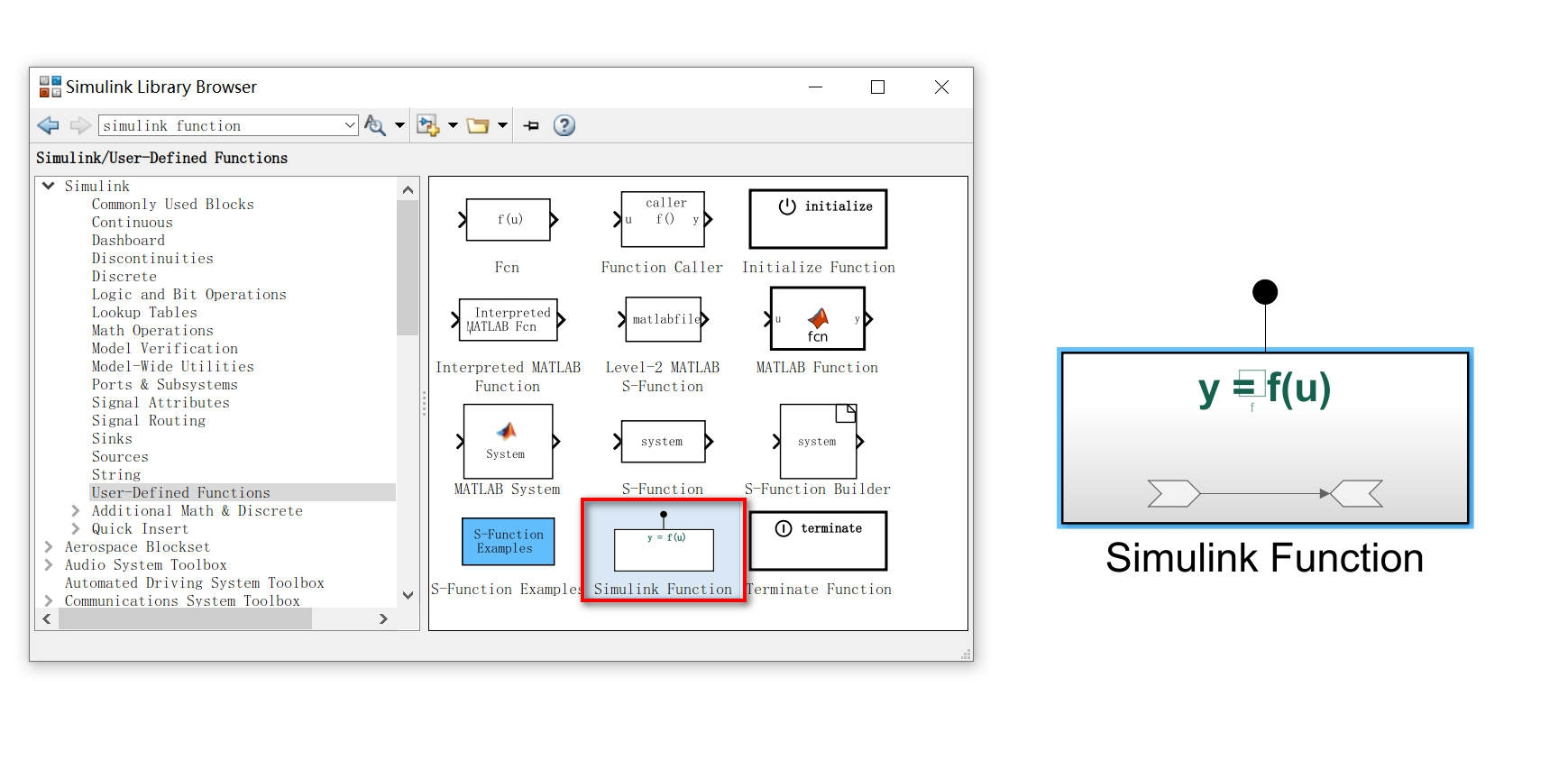
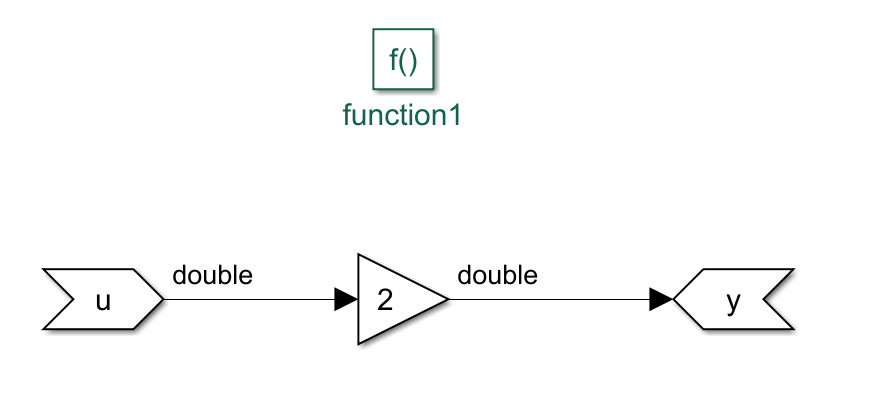
从外面可以观察到,Simulink Function子系统上方有一个引子,和一个函数表达式。左右两侧没有和子系统外界交互的端口,这一点和其他子系统不一样。
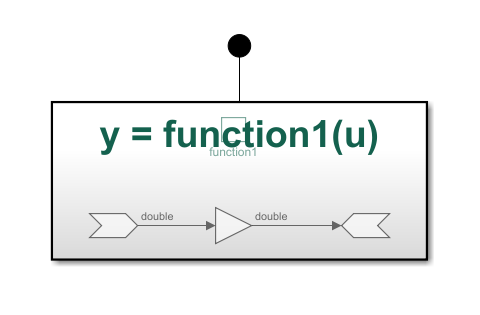
2)双击进入子系统,可以看到顶部的一个Trigger模块,以及输入输出端口。
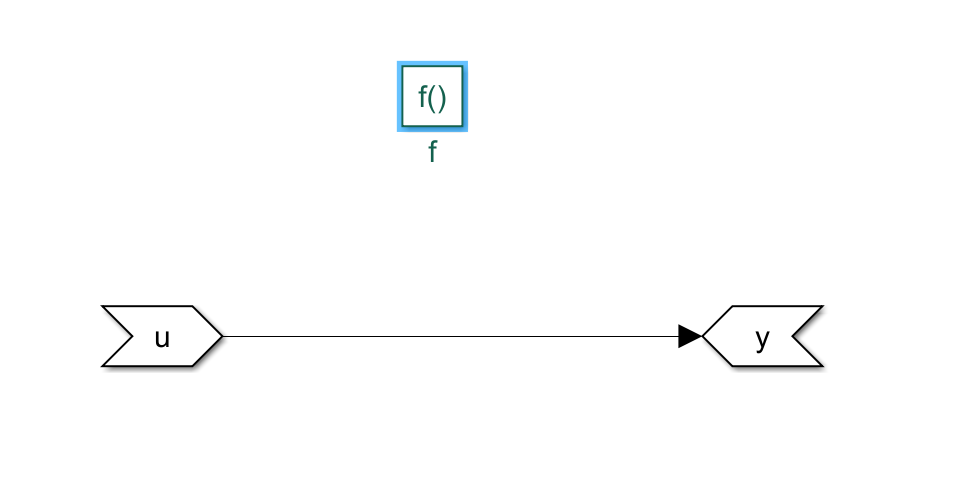
这里的输入输出端口和Inport/Outport模块是不一样的,因为这是专门用于Simulink Function子系统中的Argument Inport模块和Argument Outport模块。
3)双击Trigger模块,将函数名修改成function1,同时把Trigger模块的名称也改成function1。
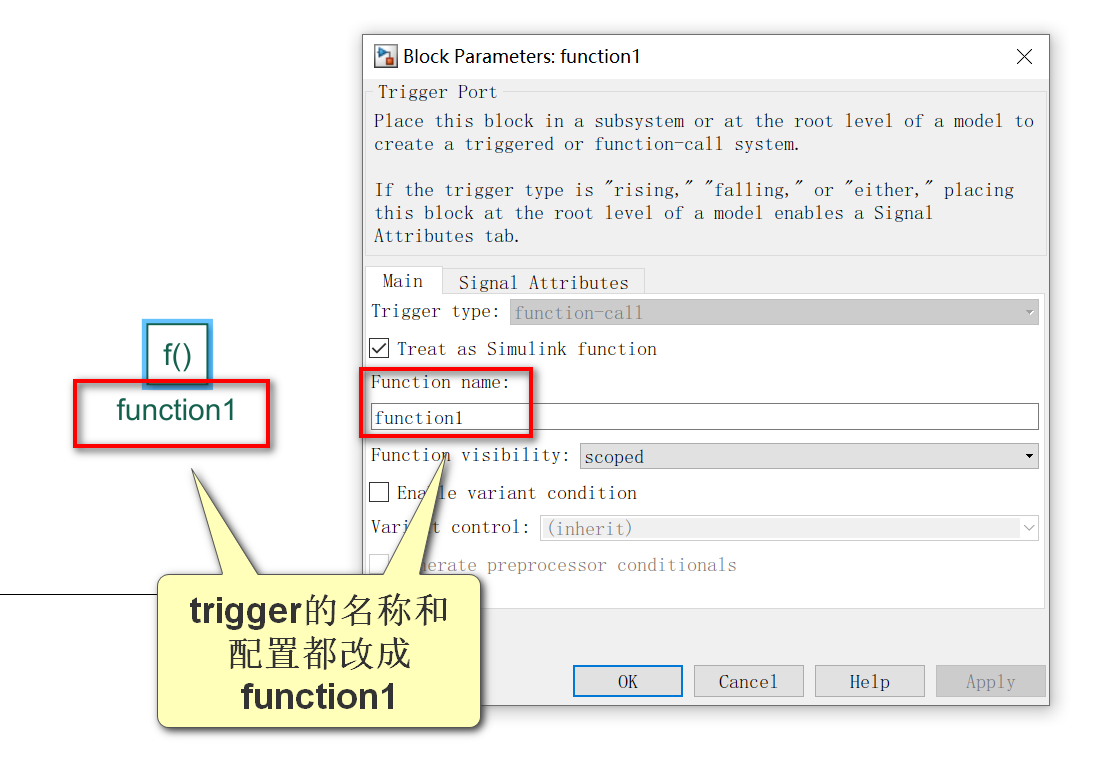
这样的话,外面的子系统的函数原型也就变成了 y = function1(u)。
4)最后在输入输出之间加一个Gain模块,使得这个Simulink Function子系统实现放大两倍的算法。
2.2 Function Caller模块
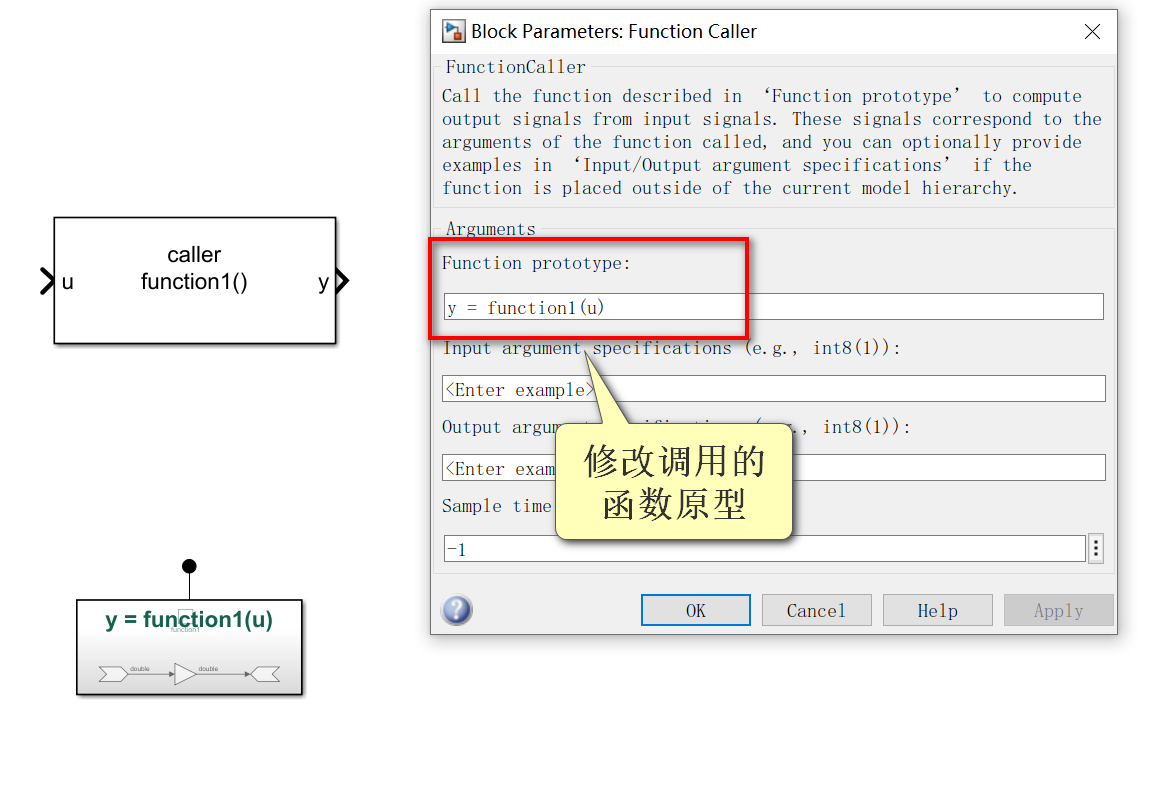
上一节建立好Simulink Function子系统后,就可以用Function Caller模块在模型的其他地方调用这个子系统的功能。
1)新建一个Function Caller模块,将其中的Function Prototype改成上文的函数原型 : y = function1(u)。
2)为Function Caller模块添加一个常数输入和一个disp输出并仿真,测试一下调用的效果。
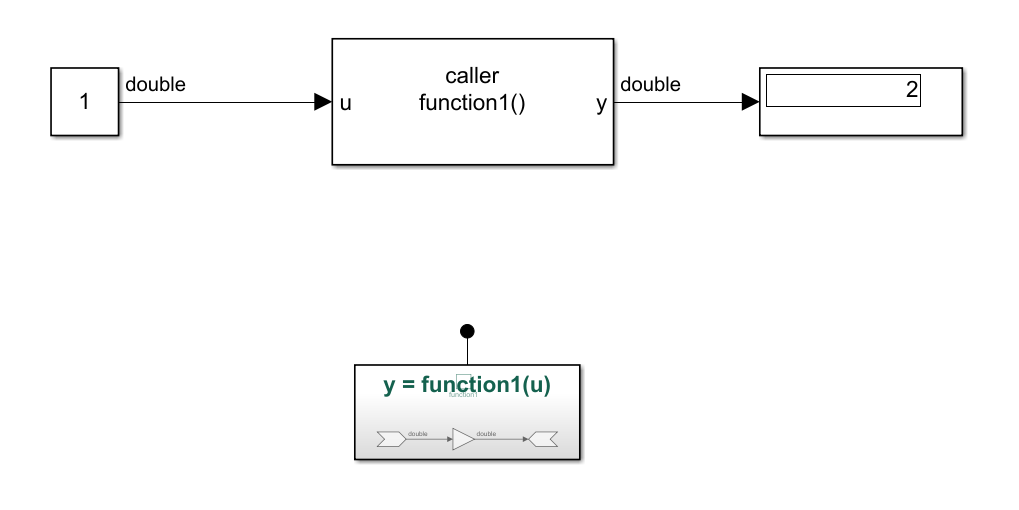
由图中可见,Function Caller模块调用了function1的gain功能。
3 代码生成
3.1 默认配置
1)将2.1章中的Function Caller模块删除,在模型中只保留一个Simulink Function子系统,然后Ctrl + B生成代码如下。
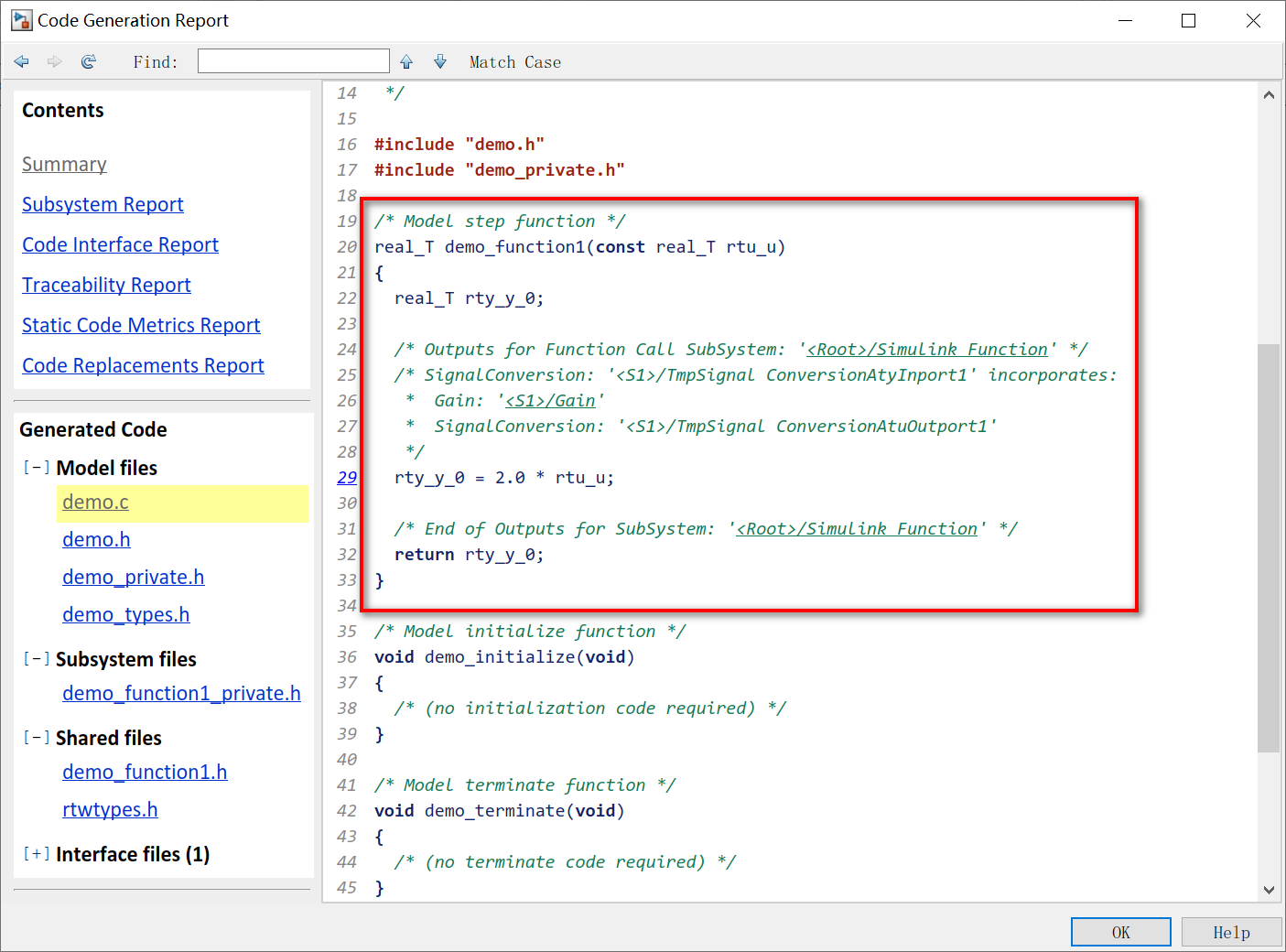
与其他博客中生成的代码有所不同,这次没有生成step函数,而是生成了一个demo_function1的函数(模型名称+Simulink Function函数名称),并且带有参数和返回值。
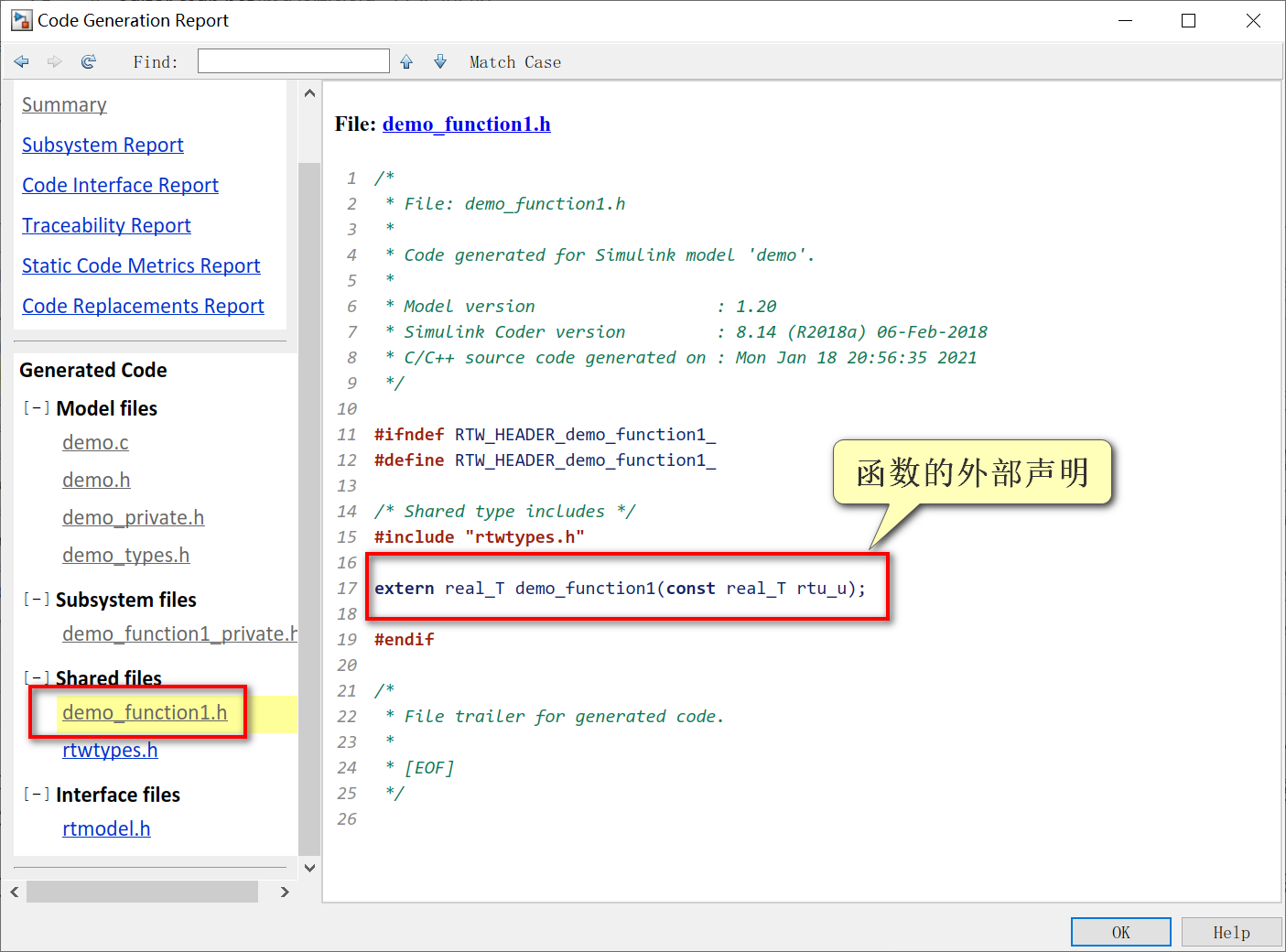
2)然后打开demo_function1.h,既可以看到这个函数的外部声明。其他的代码只要包含这个头文件,就可以调用生成的这个函数了。
3.2 Function visibility配置
在3.1中,生成的函数名中带有模型名的前缀。如果将Simulink Function做一个Global配置,生成的名称就不一样,配置过程如下。
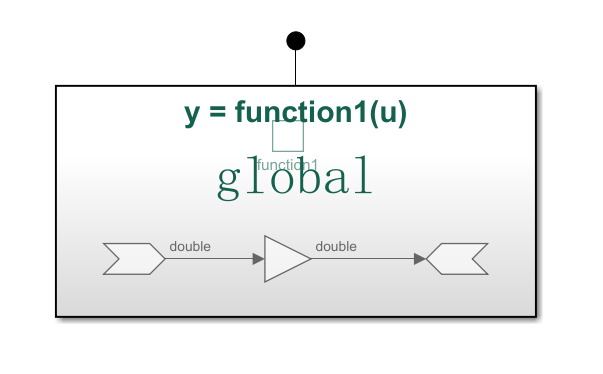
1)双击Simulink Function的Trigger模块,将Function visibility配置成global,并确认。
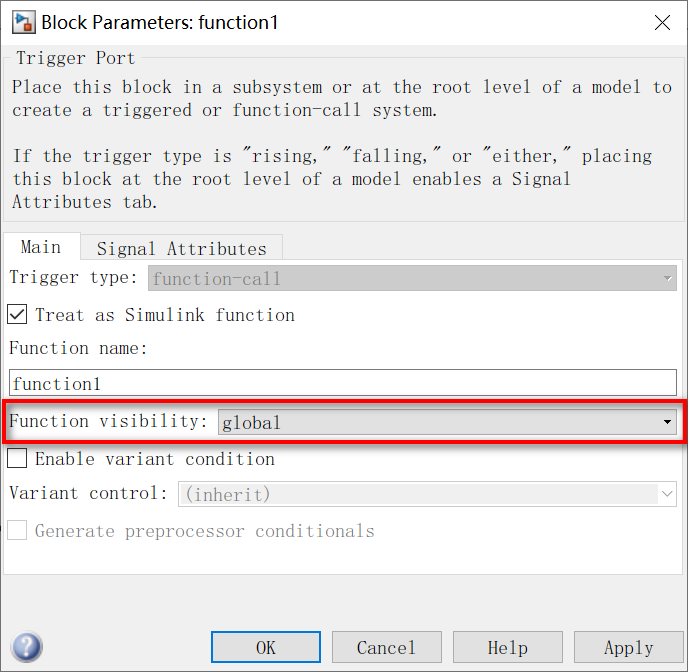
2)然后在子系统的正中间就会出现一个global的标志,代表它是全局的。
3)重新Ctrl + B生成代码如下。
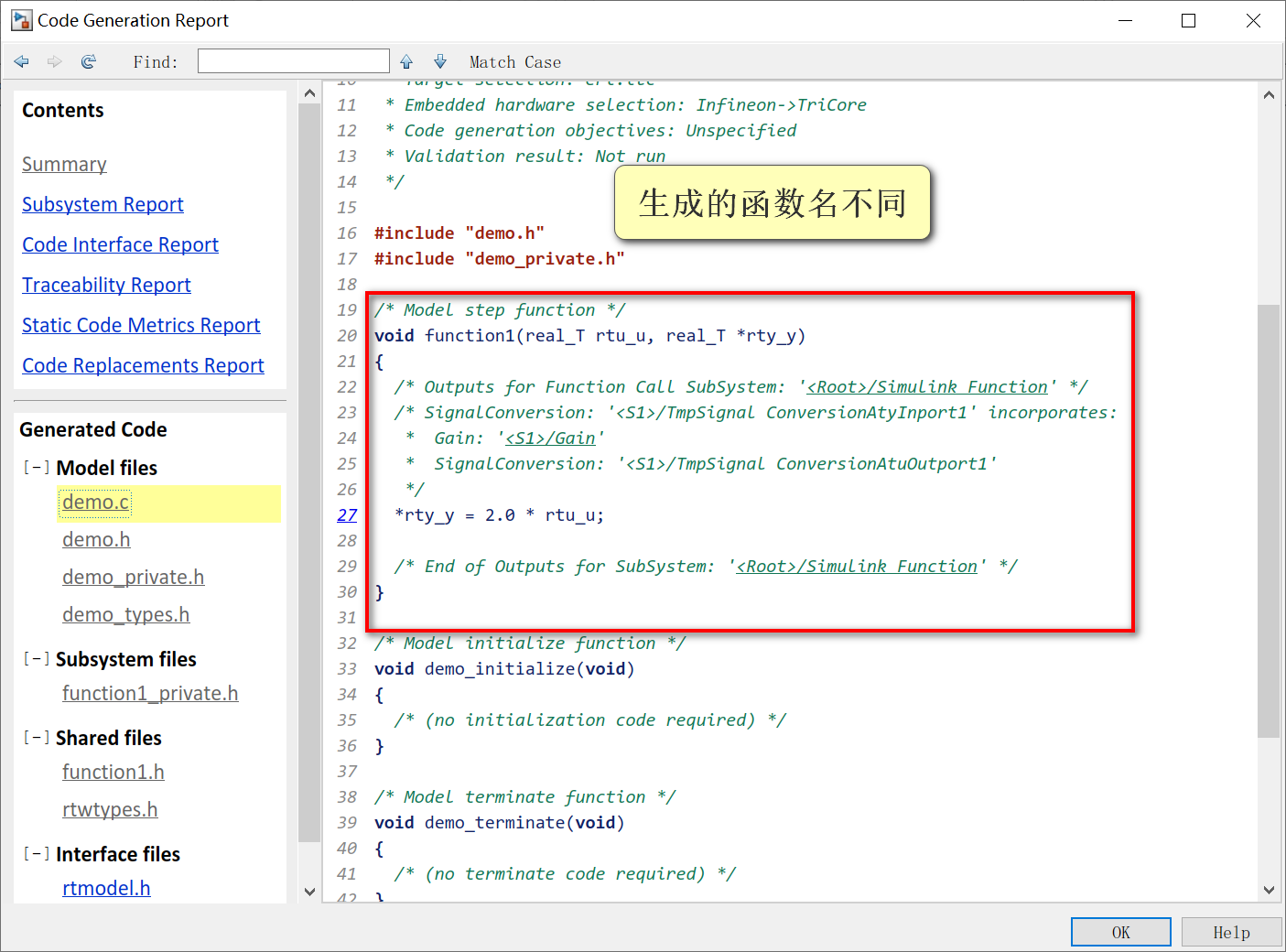
生成的函数定义和外部声明就和3.1中不同,只是function1而不再有demo的前缀,博主比较喜欢这种方式。
这里还有一点值得注意一下,输入端口变量是rtu_u,前缀是rtu;输出端口变量是rty_y,前缀是rty。前缀的字符是默认的,博主也没找到哪里可以配置,不过也没必要配置。
3.3 多个输出端口
在C语言中,一个函数只有一个return返回值。如果Simulink Function子系统有多个输出端口,生成的代码就会传递指针参数。通过下面的方式可以验证一下。
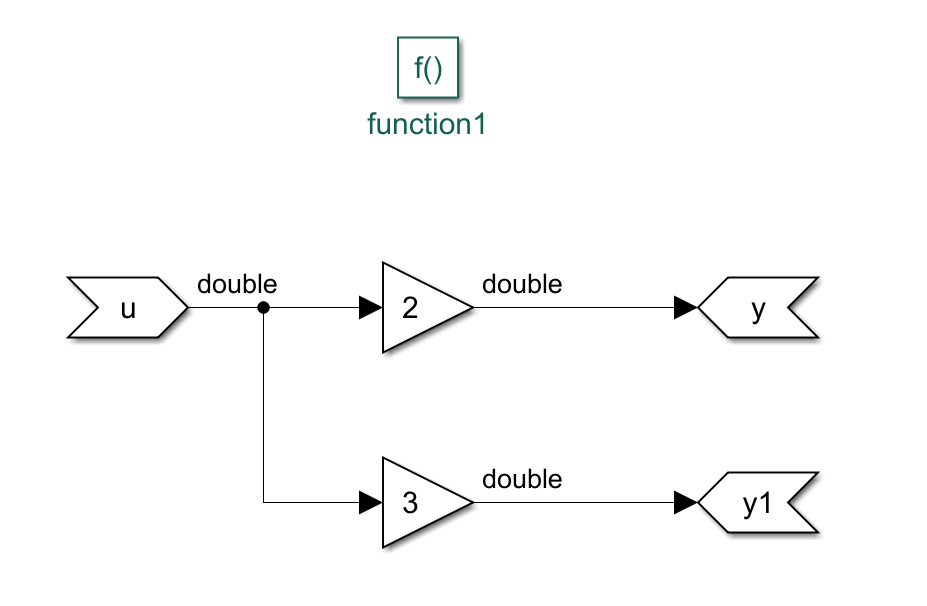
1)在3.2的基础上再增加一个Outport,并改一下Gain模块参数,如下图所示。
2)重新Ctrl + B生成代码如下。
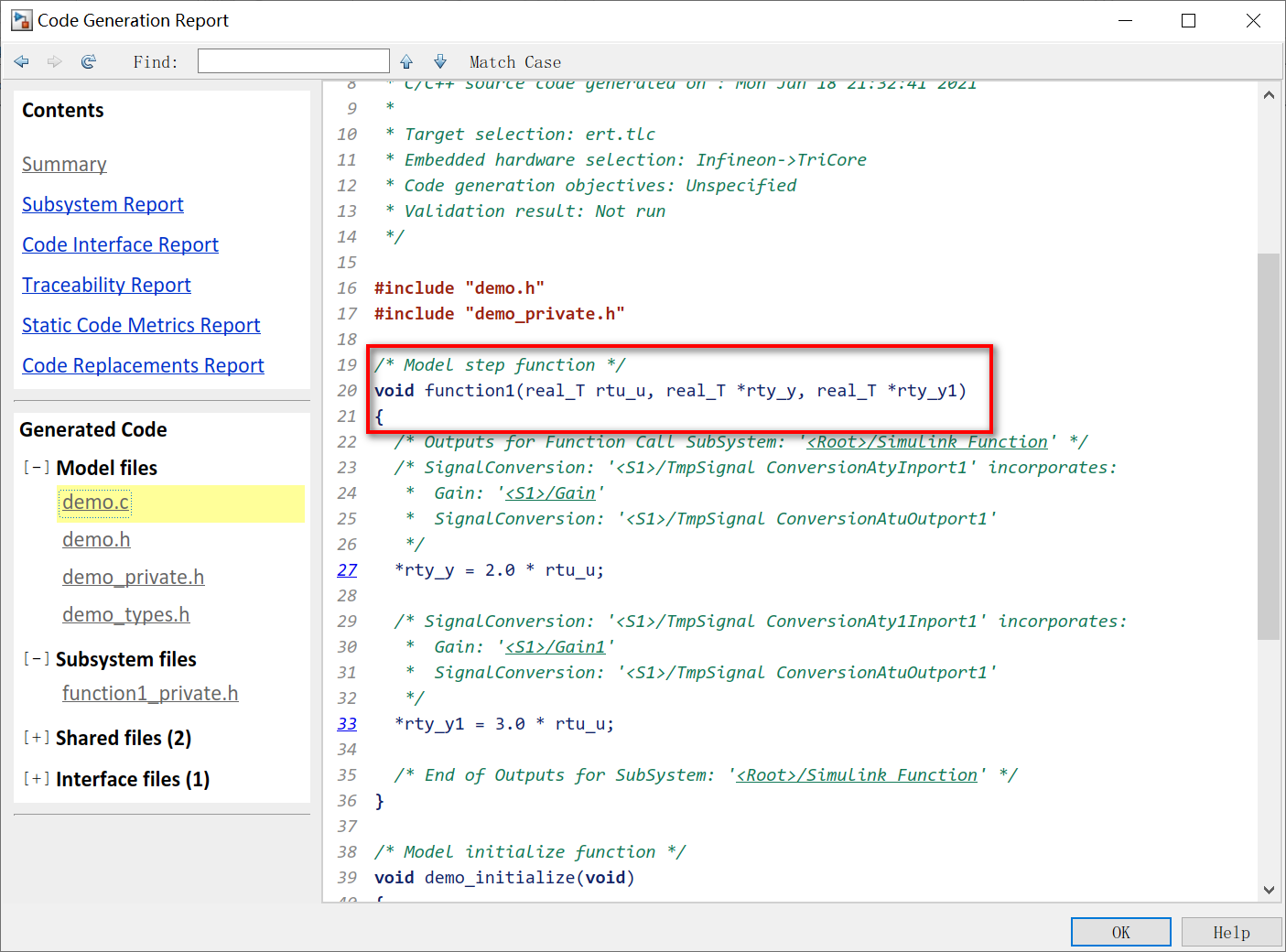
可以看出,这次生成的函数不再有返回值,而是将输出端口的变量作为指针传入函数,再由函数中更新该地址的内容。
3.4 输入和输出变量相同
在C语言编程的时候,也会遇到传入一个指针给函数,然后函数经过一些计算把地址里的值更新掉的情形。对应Simulink Function中只要把Inport和Outport的名字改成一样的即可。
1)在3.2的基础上,把输入和输出的名称都改为u。
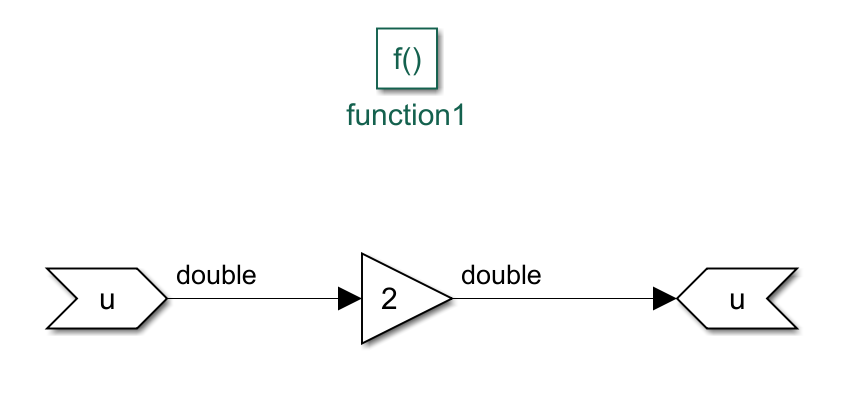
2)重新Ctrl + B生成代码如下。
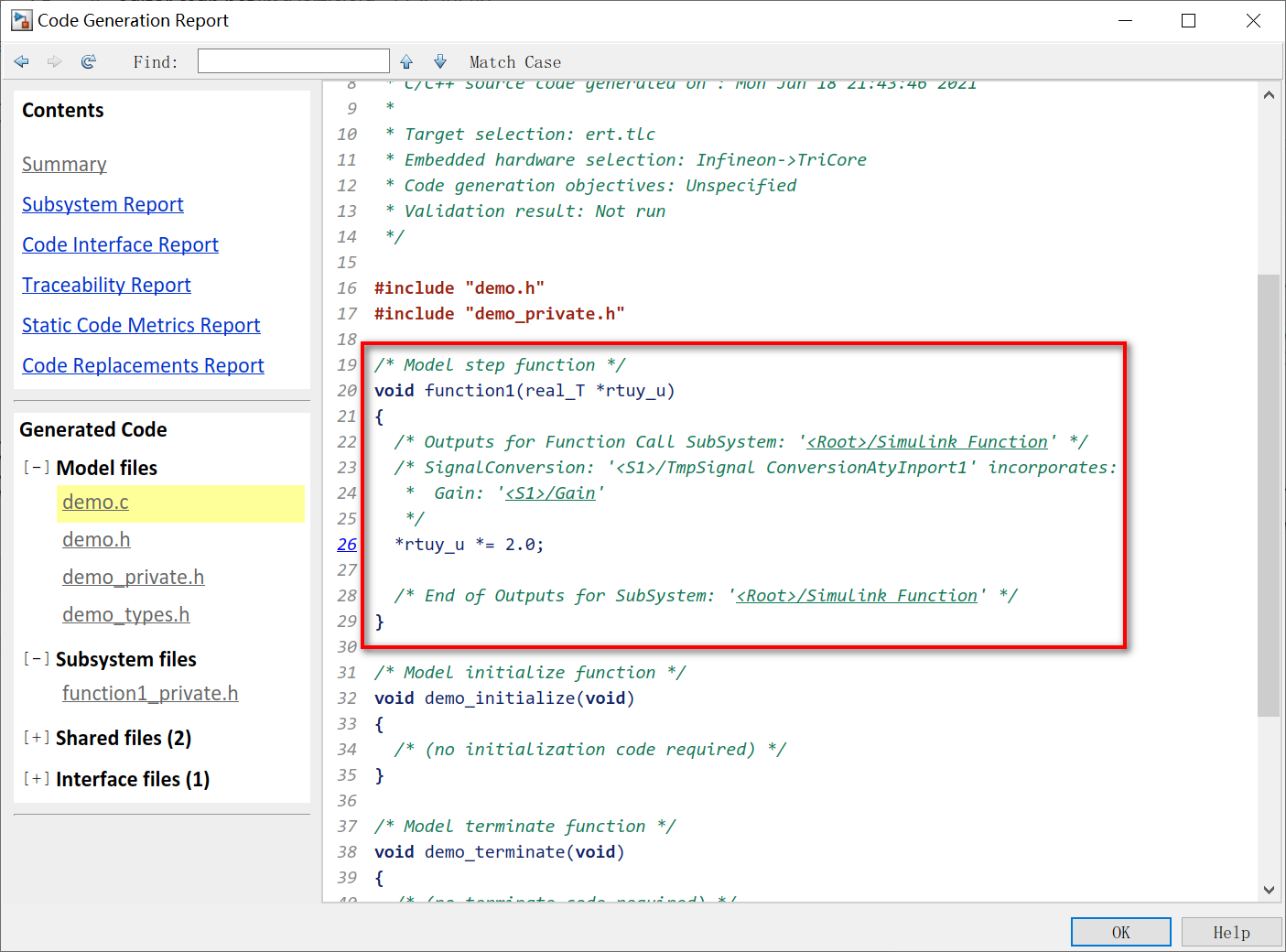
这里的函数只传入了一个指针参数rtuy_u,函数中将地址中的值乘以2,再赋值回这个地址的空间。
值得注意的是,变量前缀不是3.2中的rtu或者rty,而是rtuy,代表了这个变量在模型中既是输入也是输出。
3.5 参数为数组
对于参数为数组的情况,只需要在Argument Inport或者Argument Outport中配置即可。
1)在3.2的基础上,将Argument Inport的Port dimensions设为3。
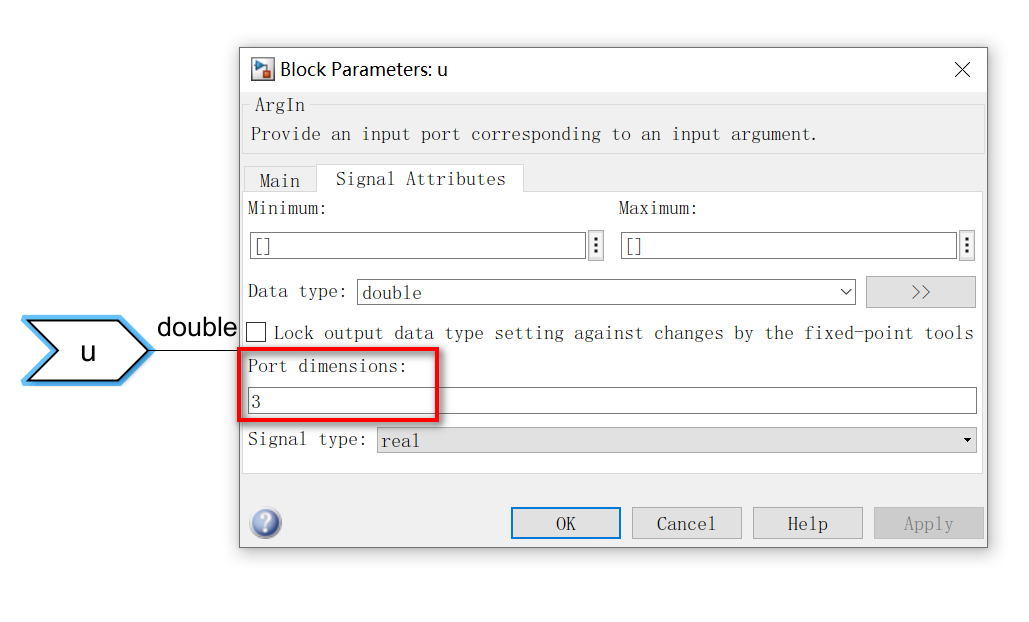
2)对输出的Port dimensions也设为3。
3)重新Ctrl + B生成代码如下。
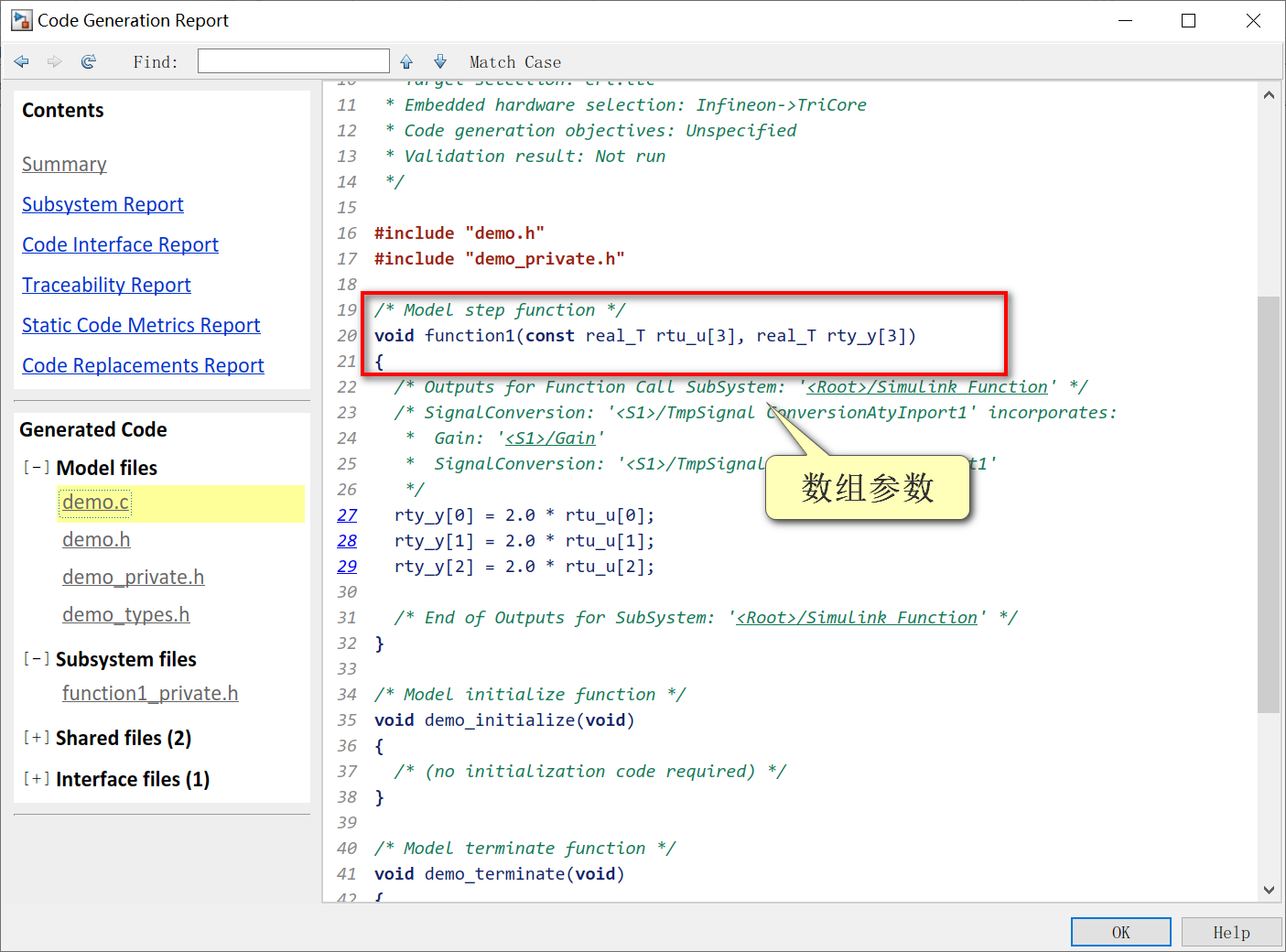
函数中传入的参数就成为了数组。
3.6 参数为结构体
对于参数为结构体的情况,需要在Argument Inport或者Argument Outport中将类型配置为bus。后面演示输入端口配置成bus的情况。
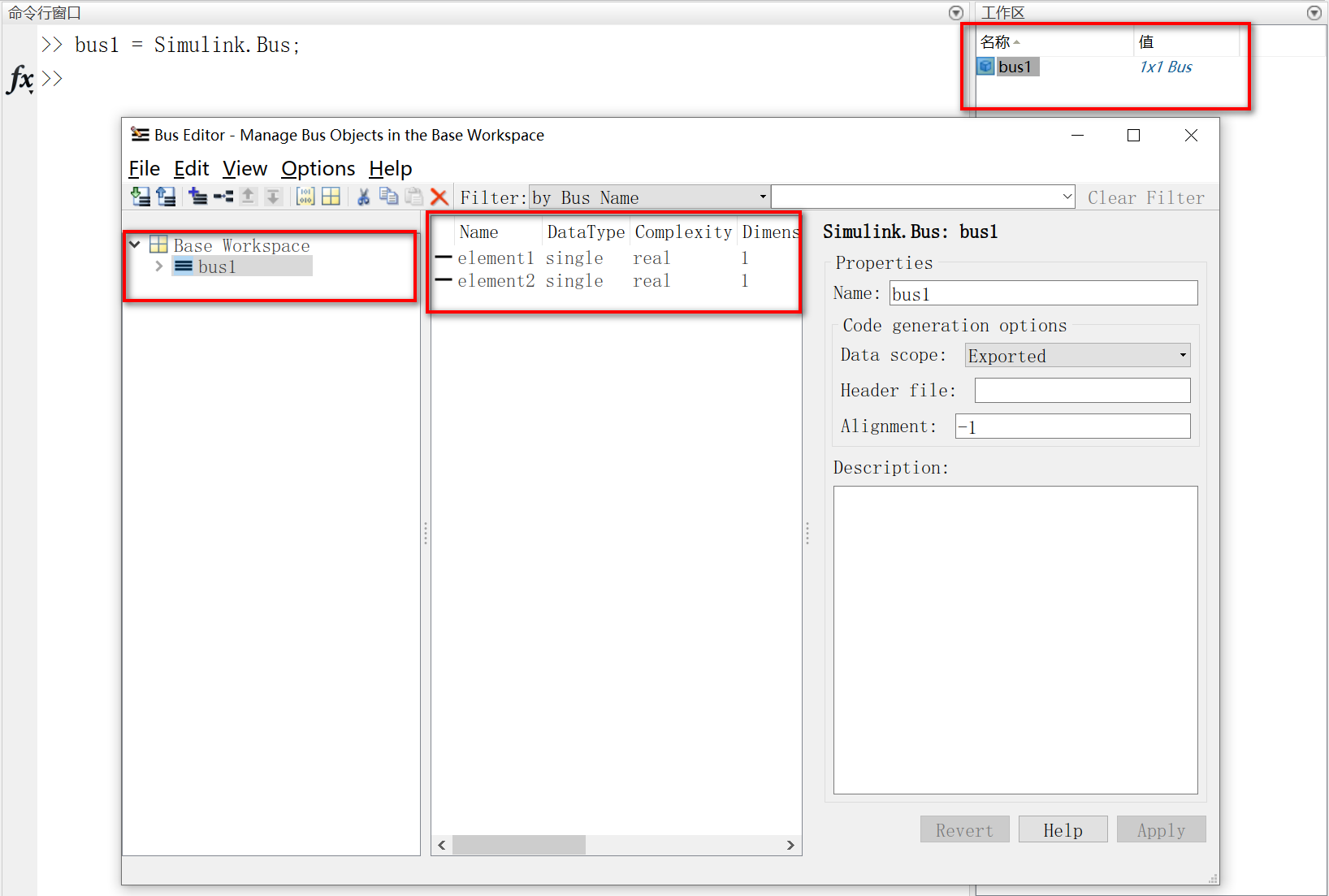
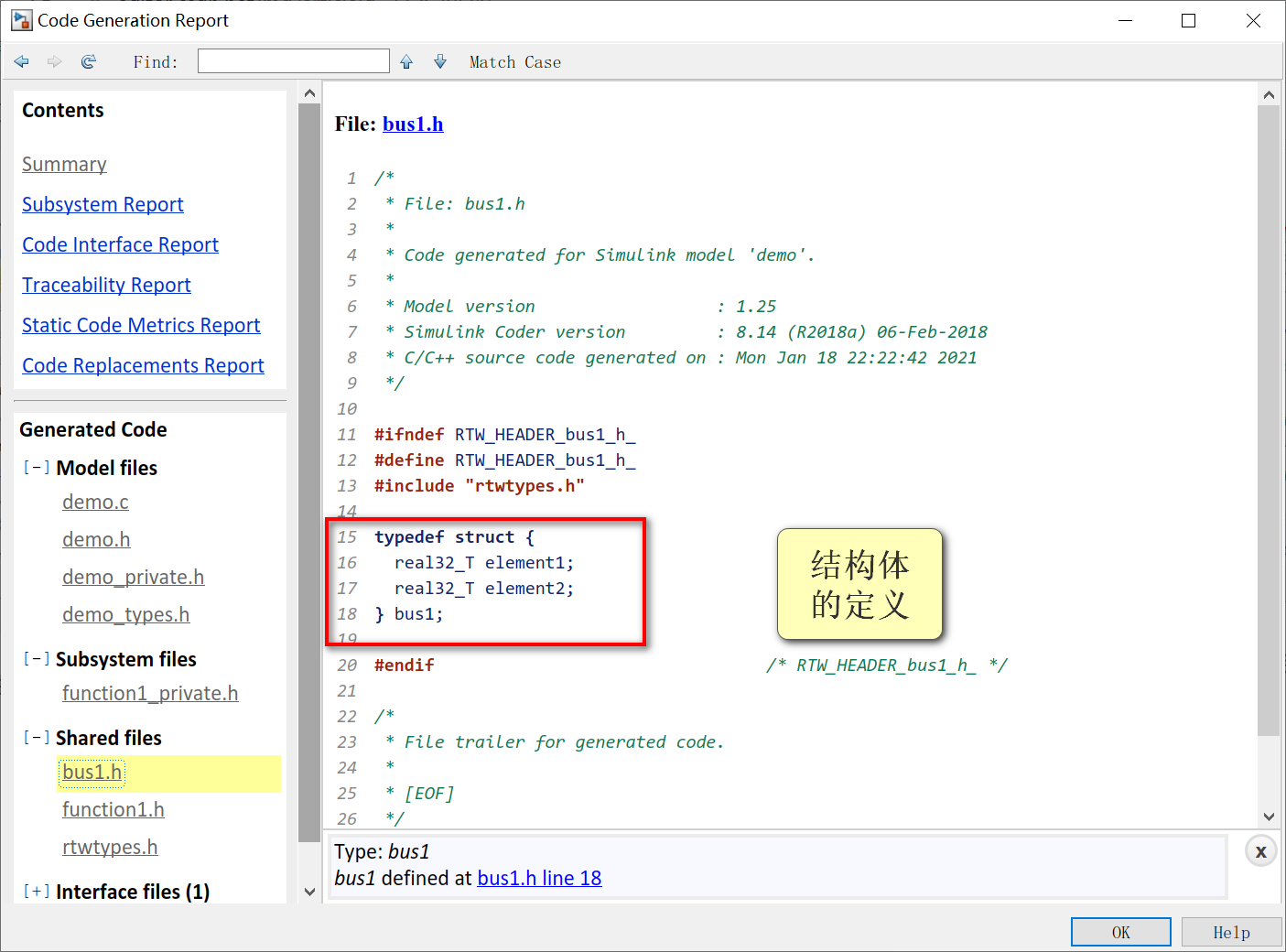
1)在Matlab工作空间新建一个bus1,并配置2个element成员。
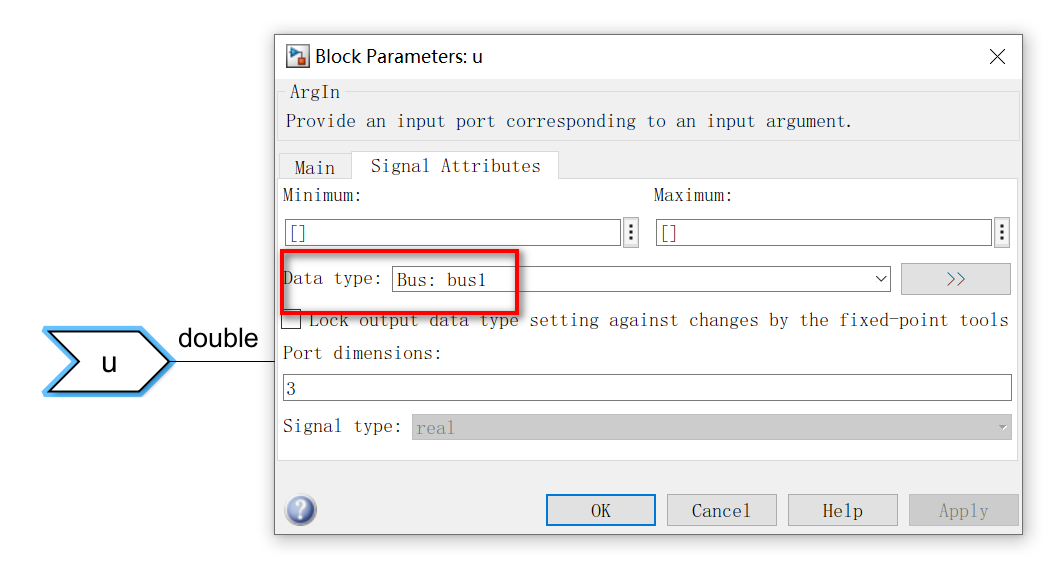
2)在3.2的基础上,将Argument Inport的类型配置为bus1。
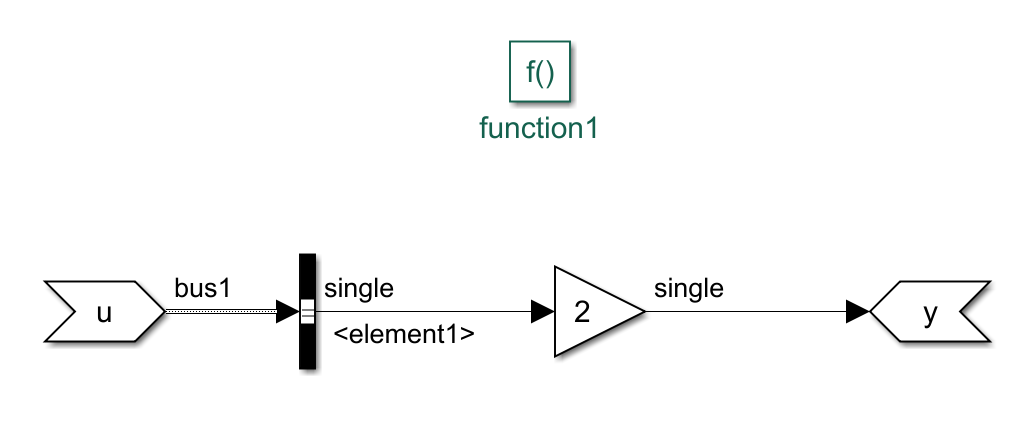
3)用Bus Selector模块,把element1挑选出来输出给后面的Gain模块。
4)重新Ctrl + B生成代码如下。
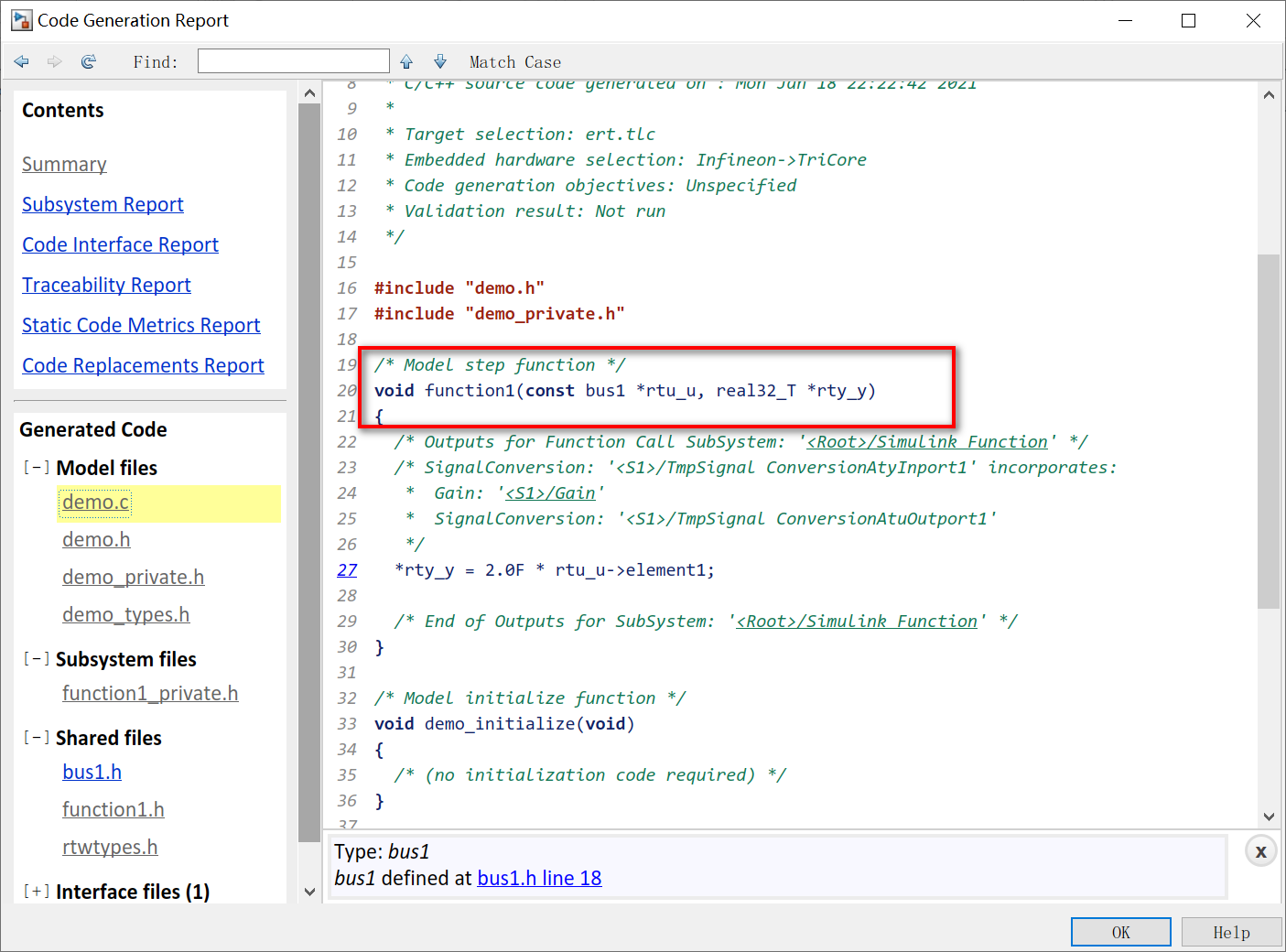
这里生成的函数的参数是一个结构体指针。结构体的定义在另一个文件中。
4 总结
Simulink Function子系统可以生成带有参数的函数,在某些需求下是非常有用的。同时还可以灵活地配置端口参数,来得到想要的函数形式。
>>返回个人博客总目录
最后
以上就是明亮小笼包最近收集整理的关于Simulink代码生成:Simulink Function子系统及其代码1 问题引入2 Simulink Function子系统建模3 代码生成4 总结的全部内容,更多相关Simulink代码生成:Simulink内容请搜索靠谱客的其他文章。








发表评论 取消回复