MATLAB–simulink工具箱的使用(2)
实例:计算机控制系统–倒立摆实验
之前在(1)中已经讲过了simulink工具箱的基本操作,今天就用simulink工具箱对倒立摆进行仿真控制。
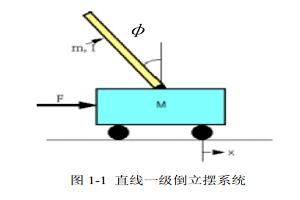
- 倒立摆系统
这里我们用到的是直线一级倒立摆系统,在忽略空气阻力和摩擦的影响之后可以简化为以下模型。
在建立系统模型的状态空间表达式的过程中,我们考虑到有以下的物理量: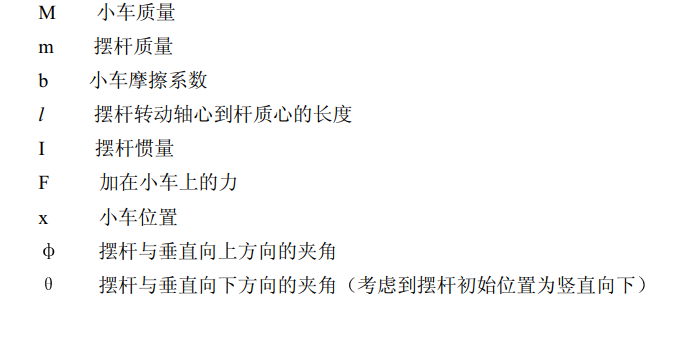
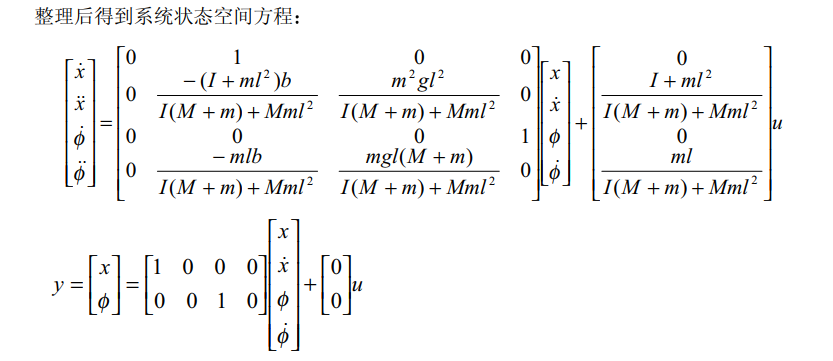
倒立摆系统中,我们需要控制的量有φ(摆杆与垂直向上方向的夹角),ω(摆杆与垂直向上方向的角速度,即φ的导数),x(小车的位置),ν(小车的速度,即x的导数)。则在建立状态空间表达式的时候,选择这四个物理量为状态变量。经过推导,可以得到模型的状态空间表达式为:
- 倒立摆系统连续控制器的设计
(1)仿真原系统的输出响应
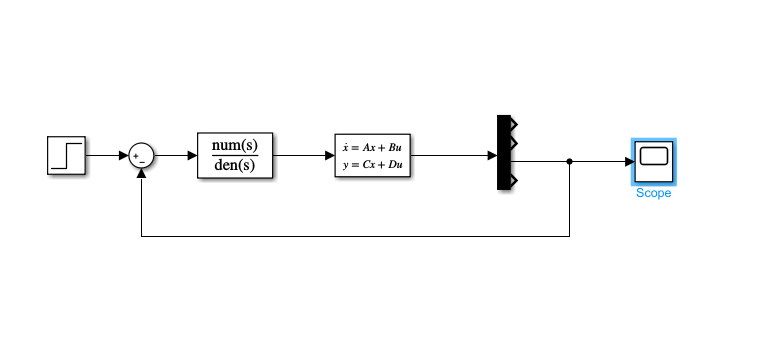
由上,我们已经得到了倒立摆系统的状态空间表达式。在simulink中对此开环系统进行仿真。
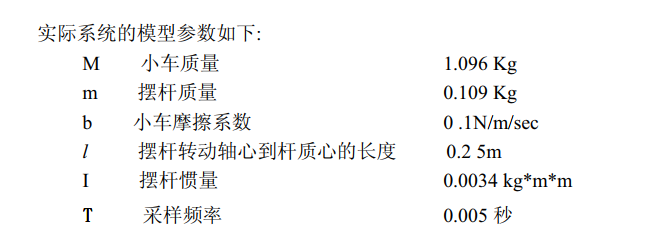
实际系统参数如下:
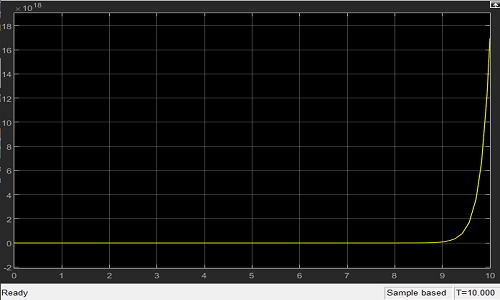
假定以后研究的对象是φ(摆杆与垂直向上方向的夹角),那么以阶跃信号作为输入信号进行开环系统的仿真,可以发现输出响应如下,由此得出不稳定。
(2)设计准备
确定设计要求:对倒立摆系统中的角度状态进行控制
①调节时间ts<3;②阻尼比>0.7;③单位阶跃干扰下最大偏离<5°。
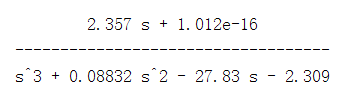
在matlab中用tf函数将状态空间表达式转化为传递函数,得到角度与输入的传递函数为:
(3)在sisotool工具箱中进行控制器设计
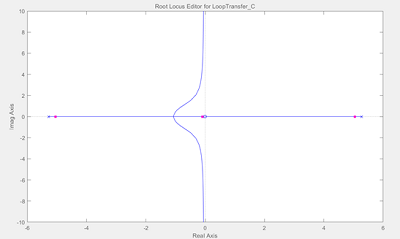
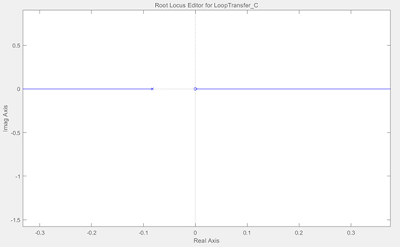
①首先,通过根轨迹图可以看到被控对象是不稳定的。根轨迹图中始终有极点处在s平面的右半平面(无论如何选择k值都有闭环极点在s右半平面)
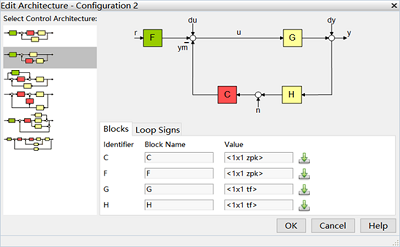
②选择合适的系统模型,选择控制器在反馈通道上的模式。(C就是控制器)
③确定控制器的零极点。观察可以发现,根轨迹图之所以在右半平面恒有值,是因为在原点有一个零点。
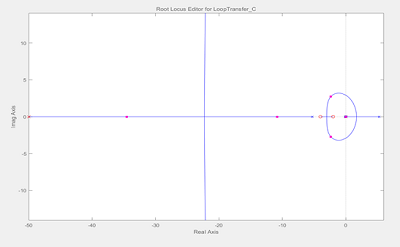
所以控制器先添加一个积分器,让整个系统在原点的零点进行零极相消。再给控制器添加两个零点-2和-4(随机选择),让根轨迹往左拉。最后再添加一个极点-50,使得影响尽量小。最后系统的根轨迹图如下所示,可以发现当选择k为一定范围内的值时,可以保证所有此时所有的闭环极点都在s的左半平面。
加入零极点之后的系统根轨迹图形为:
④确定控制器的k值。
由于设计的系统指标要求为,调节时间ts<3;阻尼比>0.7;单位阶跃干扰下最大偏离<5°,也就是单位阶跃响应图中的最大偏离<0.08rad。将设计指标在根轨迹图中显示出来(只能显示调节时间和阻尼比的要求)。需要主导极点的位置在图中白色部分。
体现调节时间要求的方法是:根轨迹图上右键->Design requirements->new->Settling time->选择小于3s。(阻尼比要求也一样,最后选择Damping ratio,大于0.7)
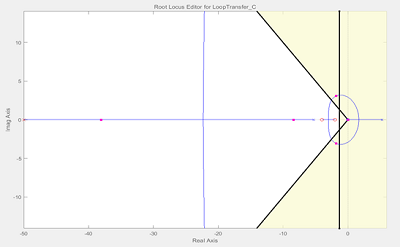
调节k值,当k=400时,发现主导极点在上图中的白色部分(即满足调节时间和阻尼比的要求),且单位阶跃响应图中最大偏移量不超过0.08rad。
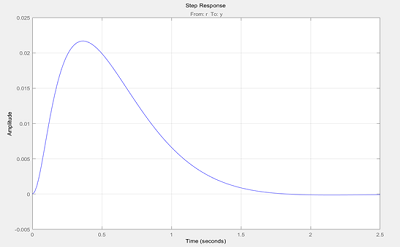
(4)得出结果并仿真
所以最终得到的控制器的传递函数为[400(s+2)(s+4)]/[s(s+50)]。
在simulink中仿真,可以看出最终输出趋于稳定,且满足设计要求。
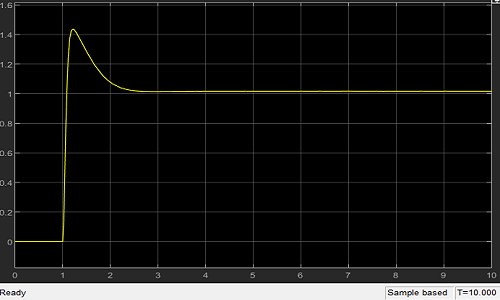
由此,就设计好了倒立摆系统的角度控制器!
成功!!撒花!!!!
最后
以上就是爱听歌小兔子最近收集整理的关于MATLAB--simulink工具箱的使用(2)的全部内容,更多相关MATLAB--simulink工具箱内容请搜索靠谱客的其他文章。








发表评论 取消回复