Author:AXYZdong 自动化专业 工科男
有一点思考,有一点想法,有一点理性!
定个小小目标,努力成为习惯!在最美的年华遇见更好的自己!
CSDN@AXYZdong,CSDN首发,AXYZdong原创
唯一博客更新的地址为: ???? AXYZdong的博客 ????
习题4
4.1 已知单位负反馈控制系统的开环传递函数
G
0
(
s
)
=
0.2
(
s
+
2
)
s
(
s
+
0.5
)
(
s
+
0.8
)
(
s
+
3
)
G_0(s)=frac{0.2(s+2)}{s(s+0.5)(s+0.8)(s+3)}
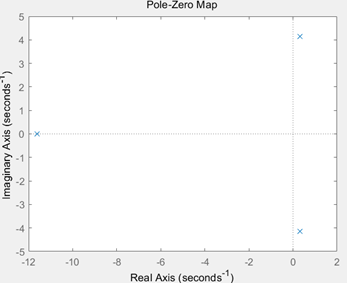
G0(s)=s(s+0.5)(s+0.8)(s+3)0.2(s+2)试此闭环系统的稳定性。
>> G1=zpk([-2],[0,-0.5,-0.8,-3],0.2)
G1 =
0.2 (s+2)
-----------------------
s (s+0.5) (s+0.8) (s+3)
Continuous-time zero/pole/gain model.
>> G=feedback(G1)
>> pzmap(G)
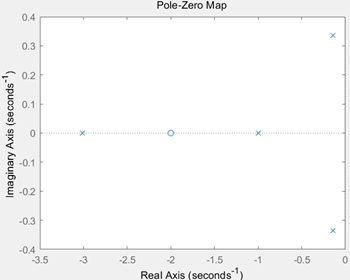
▲ 零极点图看出,稳定
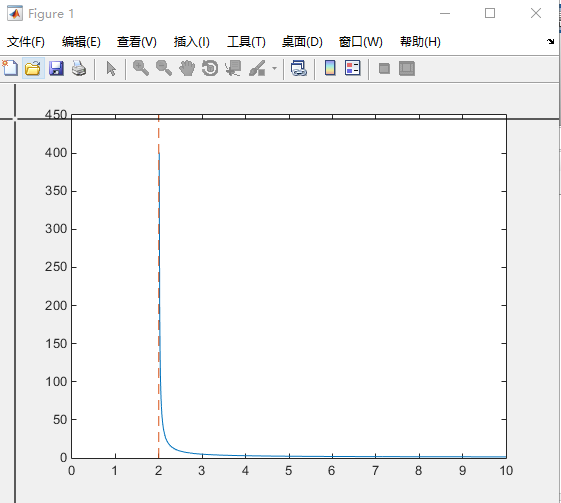
4.2 某单位反馈系统的开环传递函数为 G 0 ( s ) = K ( s + 1 ) s ( 2 s + 1 ) ( T s + 1 ) G_0(s)=frac{K(s+1)}{s(2s+1)(Ts+1)} G0(s)=s(2s+1)(Ts+1)K(s+1)试确定系统稳定时 K K K 和 T T T 参数范围,并作出稳定区域图。
>> syms K T;
assume(T<2&T>0);
assume(K>0);
isAlwaya((2+T)*(K+1)-2*T*K>0)
>>assume(T>2)
>d=(2+T)*(K+1)-2*T*K
>K=solve(d,K)
>T=(2+eps):0.01:10
>K=(T+2)./(T-2)
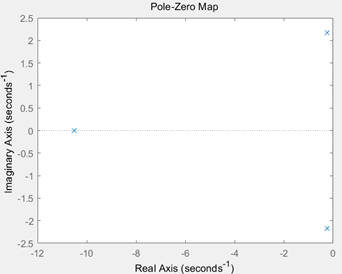
4.6 已知系统的开环传递函数为 G 0 ( s ) = K s ( s + 1 ) ( 0.1 s + 1 ) G_0(s)=frac{K}{s(s+1)(0.1s+1)} G0(s)=s(s+1)(0.1s+1)K分别判定当开环放大系数 K = 5 K=5 K=5 和 K = 20 K=20 K=20 时闭环系统的稳定性,并求出相角裕量和增益裕量。
>> G1=zpk([],[0,-1,-10],50)
G1 =
50
--------------
s (s+1) (s+10)
Continuous-time zero/pole/gain model.
G2=zpk([],[0,-1,-10],200)
G2 =
200
--------------
s (s+1) (s+10)
Continuous-time zero/pole/gain model.
>>sys1=feedback(G1,1)
>>pzmap(sys1)
>>margin(sys1)
>>sys2=feedback(G2,1)
>>pzmap(sys2)
>>margin(sys2)
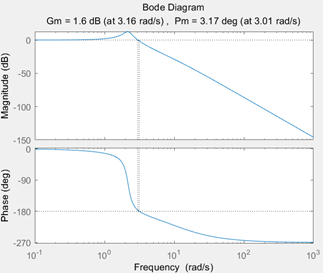
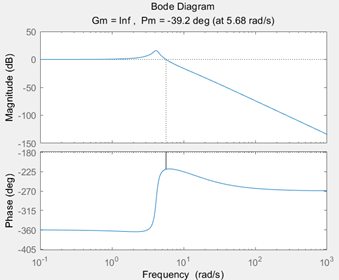
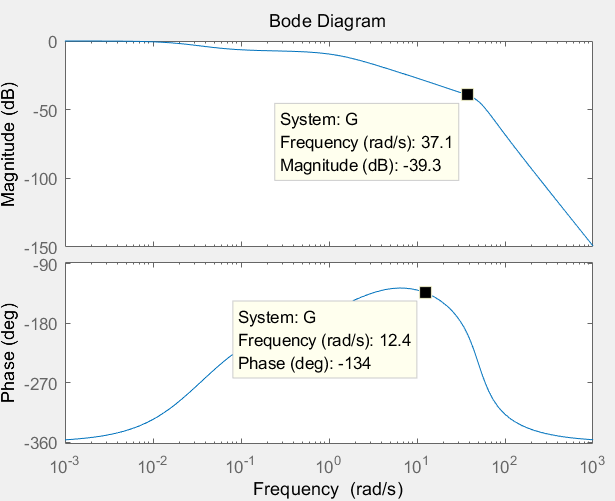
4.7 已知某系统的开环传递函数为 G 0 ( s ) = 16 ( 19 s + 1 ) ( 0.44 s + 1 ) ( 0.625 s + 1 ) ( 0.676 s − 1 ) ( 43.5 s − 1 ) ( 0.033 s + 1 ) [ ( 0.02 s ) 2 + 0.015 s + 1 ] G_0(s)=frac{16(19s+1)(0.44s+1)}{(0.625s+1)(0.676s-1)(43.5s-1)(0.033s+1)[(0.02s)^2+0.015s+1]} G0(s)=(0.625s+1)(0.676s−1)(43.5s−1)(0.033s+1)[(0.02s)2+0.015s+1]16(19s+1)(0.44s+1)试绘制系统的开环对数幅频特性和开环对数相频特性图,用对数判据分析系统闭环稳定性,并求出相角裕量和增益裕量。
G=tf(conv([19 1],[0.44 1]),conv([0.625 1],conv([0.676 -1],conv([43.5 -1],conv([0.033 1],[0.0004 0.015 1])))))
G =
8.36 s^2 + 19.44 s + 1
---------------------------------------------------------------------------
0.0002426 s^6 + 0.01647 s^5 + 0.8832 s^4 + 18.43 s^3 - 0.2936 s^2
- 43.5 s + 1
Continuous-time transfer function.
>> bode(G)
allmargin(G)
ans =
包含以下字段的 struct:
GainMargin: [2.4020 78.1546]
GMFrequency: [0.4163 32.1207]
PhaseMargin: -180
PMFrequency: 0
DelayMargin: Inf
DMFrequency: 0
Stable: 0
4.10 已知控制系统的开环传递函数为 G 0 ( s ) = K ( s + 1 ) ( 0.5 s + 1 ) ( 0.2 s + 1 ) G_0(s)=frac{K}{(s+1)(0.5s+1)(0.2s+1)} G0(s)=(s+1)(0.5s+1)(0.2s+1)K试用 Nyquist 稳定判据判定开环放大系数 K K K 为 10 和 50 时闭环系统的稳定性。
>> G1=zpk([],[-1,-2,-5],100)
G1 =
100
-----------------
(s+1) (s+2) (s+5)
Continuous-time zero/pole/gain model.
>> nyquist(G1)
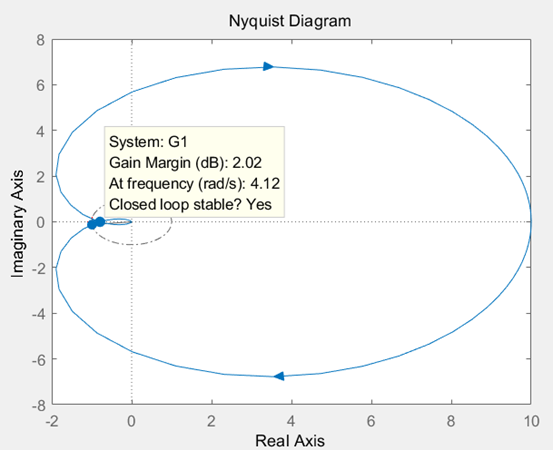
▲ 稳定
G1 =
500
-----------------
(s+1) (s+2) (s+5)
Continuous-time zero/pole/gain model.
>> nyquist(G1)
▲ 不稳定
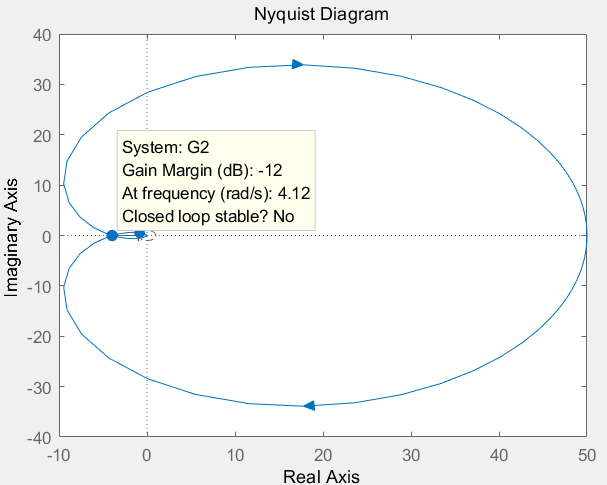
4.12 以下为某闭环系统开环传递函数,试确定闭环系统的稳定性。
G
0
(
s
)
=
s
3
+
15
s
2
+
16
s
+
200
s
5
+
10
s
4
+
30.6
s
3
+
155
s
2
+
153.7
s
+
5.56
G_0(s)=frac{s^3+15s^2+16s+200}{s^5+10s^4+30.6s^3+155s^2+153.7s+5.56}
G0(s)=s5+10s4+30.6s3+155s2+153.7s+5.56s3+15s2+16s+200
G=tf([1 15 16 200],[ 1 10 30.6 155 153.7 5.65])
G =
s^3 + 15 s^2 + 16 s + 200
--------------------------------------------------
s^5 + 10 s^4 + 30.6 s^3 + 155 s^2 + 153.7 s + 5.65
Continuous-time transfer function.
>> nyquist(G)
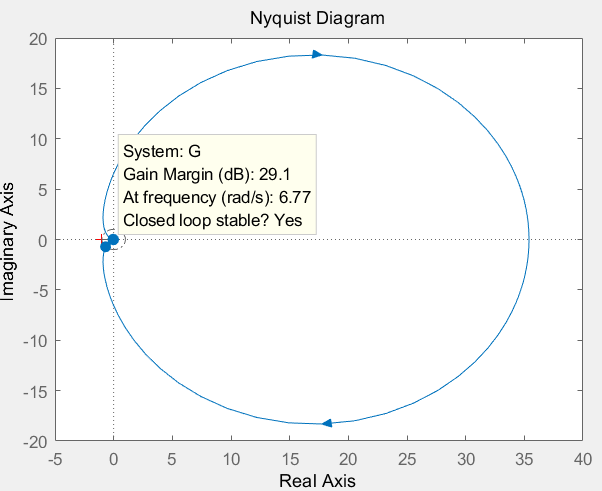
▲ 稳定
本次的分享就到这里

好书不厌百回读,熟读自知其中意。将学习成为习惯,用知识改变命运,用博客见证成长,用行动证明努力。
如果我的博客对你有帮助、如果你喜欢我的博客内容,请 “点赞” “评论” “收藏” 一键三连哦!
听说 ???? 点赞 ???? 的人运气不会太差,每一天都会元气满满呦!^ _ ^ ❤️ ❤️ ❤️
码字不易,大家的支持就是我坚持下去的动力。点赞后不要忘了???? 关注 ????我哦!
更多精彩内容请前往 AXYZdong的博客
如果以上内容有任何错误或者不准确的地方,欢迎在下面 ???? 留个言。或者你有更好的想法,欢迎一起交流学习~~~
最后
以上就是魁梧牛排最近收集整理的关于基于matlab的控制系统与仿真-4 习题4 的全部内容,更多相关基于matlab的控制系统与仿真-4 内容请搜索靠谱客的其他文章。








发表评论 取消回复