(1)搭建一个场景,添加车辆
(2)将点云传感器添加到车辆上
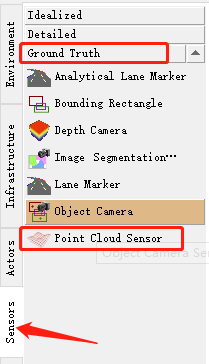
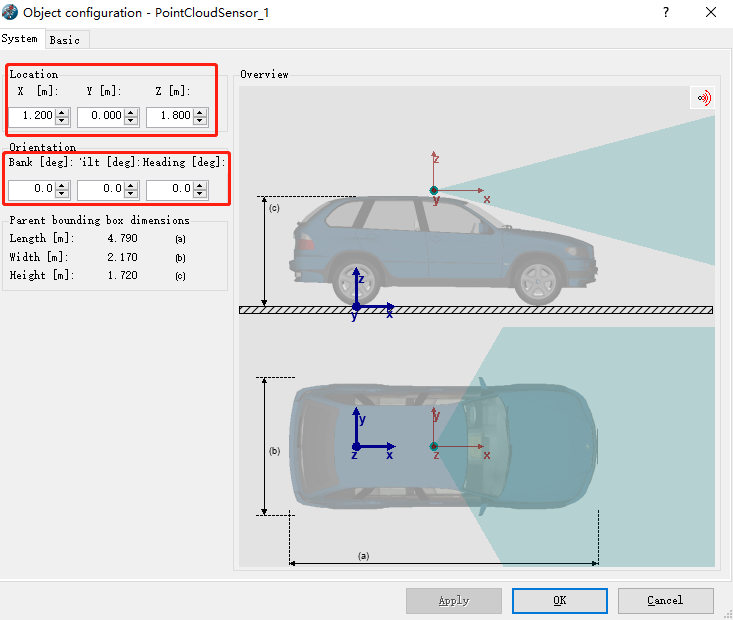
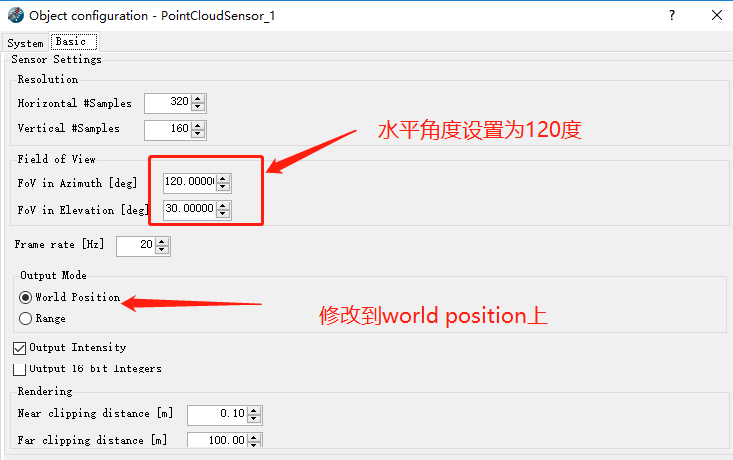
(3)添加三个点云传感器,system配置如下
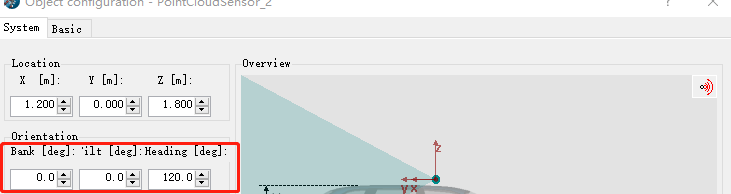
第二第三个点云传感器的角度设置

(4)编译并打开simulink,在模型汇中添加
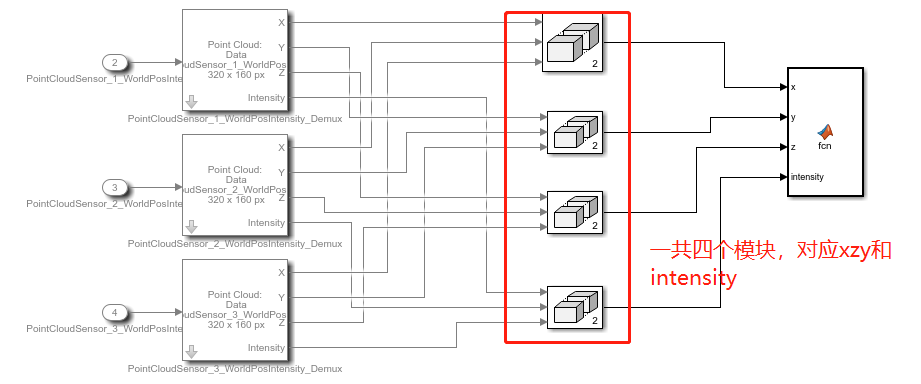
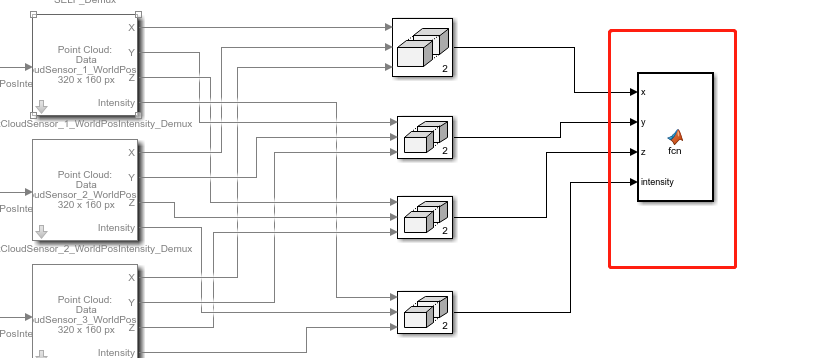
(5)一共添加4个 matrix 模块,并对应将三个传感器的 x 与 x,y 与 y,z 与 z,intensity 与 intensity 连接起来
(6)回到主界面,打开用户定义模块
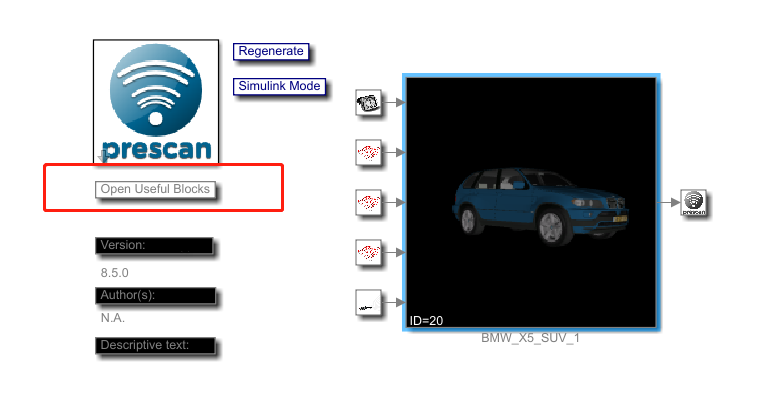
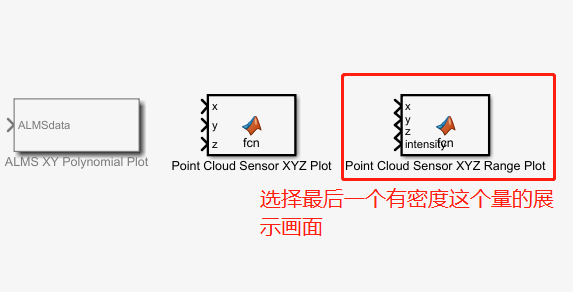
(7)将各个模块连接起来
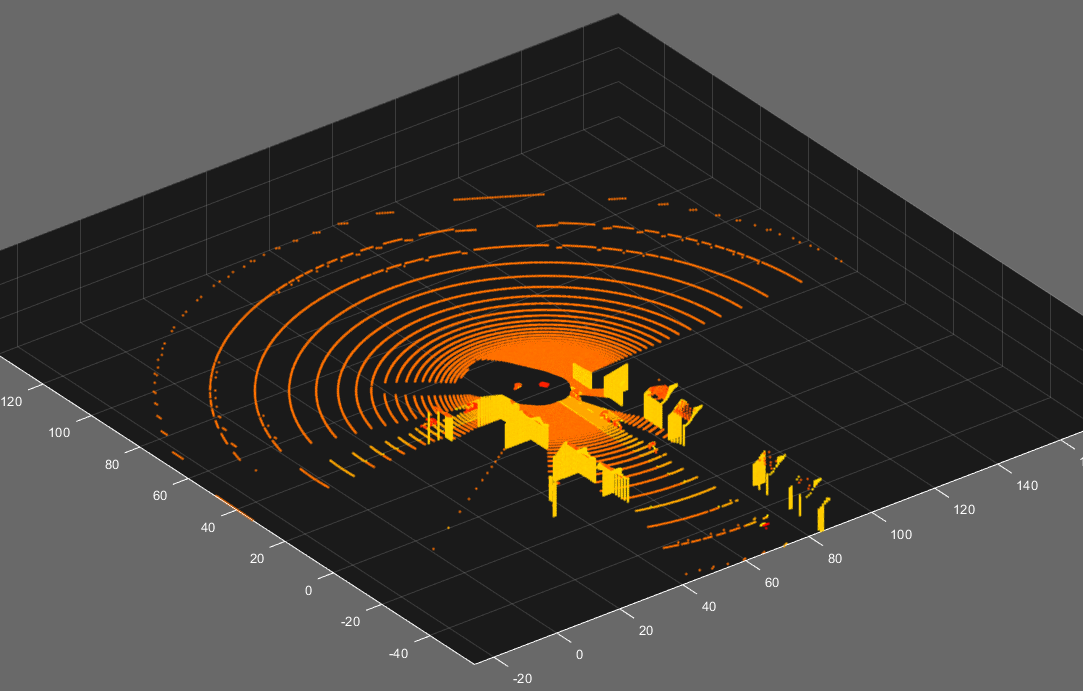
(8)运行结果
总结:
点云传感器是真值传感器,运算快,不能添加噪声;激光雷达传感器可以添加噪声,运算吃资源。同时,点云传感器最大配置角度是120°,所以要模拟激光雷达的可视化效果,需要将三个点云传感器做拼接。
备注:
感谢西门子 Tass Prescan 培训师谢工提供帮助。
最后
以上就是欢呼学姐最近收集整理的关于Prescan(九):配置点云 point cloud 传感器的全部内容,更多相关Prescan(九):配置点云内容请搜索靠谱客的其他文章。
本图文内容来源于网友提供,作为学习参考使用,或来自网络收集整理,版权属于原作者所有。








发表评论 取消回复