基础准备
两台电脑:PCWindows PCUnbuntu
用局部路由器连线两个电脑,两个电脑在Windows系统环境下连网


第一步 PCWindows PCUbuntu
PCWindows PCUbuntu 均为windows系统
- 关闭两个电脑防火墙
电脑>>属性>>大图标查看>>防火墙管理 - 常看电脑通信ip
在windows的cmd中输入ipconfig,ip为:
无线局域网适配器 WLAN:
IPv4 地址 . . . . . . . . . . . . : 192.168.3.207
据此:PCWindows的IP为:192.168.3.207
PCUbuntu的IP为:192.168.3.111 - 两台电脑ip通信测试
在PCWindows的cmd中输入:ping 192.168.3.111
出现以下信息:
正在 Ping 192.168.3.111 具有 32 字节的数据:
来自 192.168.3.111 的回复: 字节=32 时间=2ms TTL=128
来自 192.168.3.111 的回复: 字节=32 时间=2ms TTL=128
来自 192.168.3.111 的回复: 字节=32 时间=2ms TTL=128
来自 192.168.3.111 的回复: 字节=32 时间=3ms TTL=128
192.168.3.111 的 Ping 统计信息:
数据包: 已发送 = 4,已接收 = 4,丢失 = 0 (0% 丢失),
往返行程的估计时间(以毫秒为单位):
最短 = 2ms,最长 = 3ms,平均 = 2ms
在PCUnbuntu的cmd中输入:ping 192.168.3.207
两个电脑网络连接成功;
第二步 PCUbuntu
PCUnbuntu从Windows系统切换到Ubuntu系统
- 查看ip
Ctrl+alt+T打开命令窗口,输入:ifconfig
Wlp3s0: inet 192.168.3.111
据此:PCUbuntu的IP为:192.168.3.111
同一台电脑即使切换了系统,ip也不会发生改变 - 两台电脑ip再次通信测试
PCUbuntu再次ping输入:ping 192.168.3.207
PCWindows的cmd中输入:ping 192.168.3.111
通信成功 - 执行下面代码运行节点
rosclean purge
cd ~/catkin_ws
catkin build hierarchy_avoid
source devel/setup.bash
roslaunch hierarchy_avoid hierarchy_avoid.launch
第三步 PCWindows
- 通过PreScan打开Matalb
- Matalb设置ros通信
在matlab的命令窗口输入:
setenv(‘ROS_MASTER_URI’,‘http://192.168.3.111:11311’)
setenv(‘ROS_IP’,‘192.168.3.207’)
rosinit - simulink中ROS的网络
Run对应的后缀为.slx的simulink文件,报错:ROS network addresses configuration,点击open:
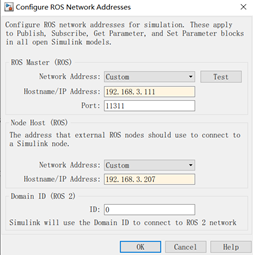
test成功,可以选择message类型,由此,完成通信设置
最后
以上就是甜甜帆布鞋最近收集整理的关于PreScan-Simulink-ROS通信设置笔记的全部内容,更多相关PreScan-Simulink-ROS通信设置笔记内容请搜索靠谱客的其他文章。
本图文内容来源于网友提供,作为学习参考使用,或来自网络收集整理,版权属于原作者所有。








发表评论 取消回复