Point Cloud Sensor是真值传感器,能够输出原始的点云数据
转载请注明出处:https://blog.csdn.net/gloria_iris/article/details/105720798
目录
1. 介绍
(1). Angular Sample Map
(2). Sample Accuracy
(3). Angular error correction
(4). Frame rate
(5). Output mode
(6). Detection range
(7). Output data representation
(8). User Interface(UI) vs. data model API
2. PCS的配置
3. PCS在Simulink中的输出
1. 介绍
PCS(Point Cloud Sensor)是以高数据速率和高更新速率构造点云数据的理想传感器,具有固定但可配置的模式,并针对性能(速度)进行了优化。PCS是gound truth(真值)传感器,从传感器视角对世界采样,采样方向称为角度采样图,对每个采样方向返回点云数据,根据传感器配置对每个采样点提取信息。
(1). Angular Sample Map
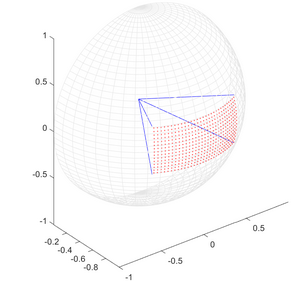
指定了所需样本方向的集合,实际采样方向可能有些差异。the angular sample map由4个参数构成,这些参数描述了单位球面上的规则网格,因而方向可球形坐标中描述:
| 参数 | 描述 | 默认值 | Min. | Max. |
|---|---|---|---|---|
| FoV in Azimuth(deg) | 传感器的水平视场角 | 60 | 0.1 | 120 |
| FoV in Elevation(deg) | 每个azimuth方向,相同的垂直视场 | 30 | 0.1 | 60 |
| #水平采样 | azimuth方向上等角距离样本的数量 | 320 | 1 | 3840 |
| #垂直采样 | elevation方向上等角距离样本的数量 | 160 | 1 | 2160 |
传感器位于半球中心,蓝线表示视场角的线。仔细看会发现蓝线没有完全结束于采样点的corner,这是为了无缝并排排放多个PCSs,以构建更宽的视场或将视场从一个时间步长移动到另一个时间步长。例子中60度azimuth进行30次采样,采样间隔=2deg。azimuth角度是[-29,-27,...,-1,1,...,27,29]。
(2). Sample Accuracy
PCS有基本的采样策略,规定了一组可能的采样方向。传感器报告有关采样点的信息,意味着采样点与the angular sample map中指定的点可能不重合。方位角和仰角的最大误差由标中的两个参数控制:
| 参数 | 描述 | 默认值 |
|---|---|---|
| azimuth sample accuracy(deg) | azimuth方向的角度误差<=azimuth采样精度的一半 | 0.05 |
| elevation sample accuracy(deg) | elevation方向的角度误差<=elevation采样精度的一半 | 0.05 |
当前只能通过模型API访问这些值,因为PreScan对这些值不施加任何限制,必须小心配置参数。较小的值会提高角度精度,但也会使传感器变慢,甚至发生意外情况。
(3). Angular error correction
PCS有有效算法来估计传感器在准确方向上的采样,该算法默认开启,可通过API关闭。
| extrapolation | angular accuracy | range accuracy | points are real intersections |
|---|---|---|---|
| false | azimuth/elevation采样精度的一半 | 约为0m | always |
| true | 约为0度 | 无界,但优于均值 | mostly |
(4). Frame rate
帧率=水平采样*垂直采样的集合
(5). Output mode
有两种输出模式:
- World Position(default):返回每个点在Prescan世界坐标系中的(x,y,z)坐标位置;
- Range mode:返回每个点的距离。
选项:可在采样点返回目标的反射率,该反射率是red channel的漫反射。在用户界面intensity复选框,值的范围[0.0,1.0];
(6). Detection range
通过near clipping distance和far clipping distance参数来配置检测到的最小和最大距离。
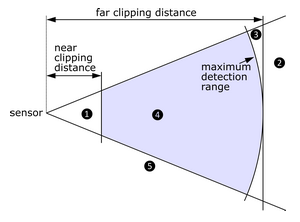
图2中对象1的深度<near clipping,因此不被检测,移除后不会遮挡任何其他目标;目标2的深度>far clipping,故不被检测;PCS的最大检测距离=far clipping distance,即目标3不被检测;目标4在检测范围内,可被检测;目标5在FOV外,不被检测。
| 参数 | 描述 | 默认值 | min. | max. |
|---|---|---|---|---|
| Near clipping distance(m) | 深度小于ncd的区域将被移除 | 0.1 | 0.01 | fcd-0.01 |
| Far clipping distance(m) | 深度大于fcd的区域将被移除 | 150 | 0.02 | 1000 |
(7). Output data representation
PCS返回的值是单精度(32位)浮点型,当图2的蓝色区域无检测时,输出的Range=inf,X,Y,Z=NaN(取决于输出模式)。
(8). User Interface(UI) vs. data model API
| 参数 | In UI | In model API | 参数 | In UI | In model API |
|---|---|---|---|---|---|
| FoV in Azimuth(deg) | Yes | Yes | FoV in Elevation(deg) | Yes | Yes |
| #horizontal samples | Yes | Yes | #vertical samples | Yes | Yes |
| horizontal sample accuracy | No | Yes | vertical sample accuracy | No | Yes |
| extrapolation | No | Yes | |||
| Output mode | Yes | Yes | Output intensity | Yes | Yes |
| near clipping distance | Yes | Yes | far clipping distance | Yes | Yes |
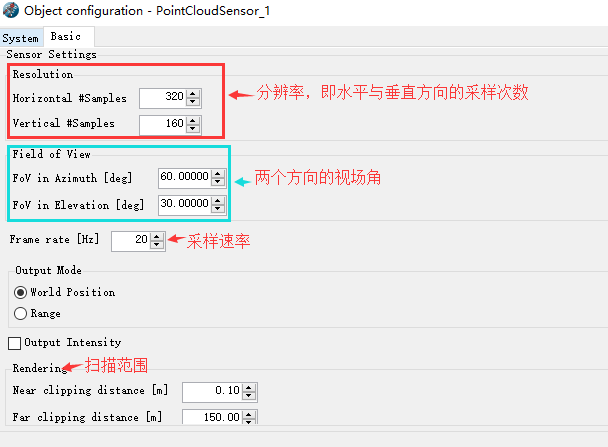
2. PCS的配置
- System tab:位置和方向;
- Basic Tab:配置如图3.
3. PCS在Simulink中的输出

输出端口x,y,z,Rnage, Intensity是矩阵形式,矩阵维数对应PCS的水平和垂直采样。可在Compilation Sheet的’Open Useful Blocks‘中找到点云可视化模块。
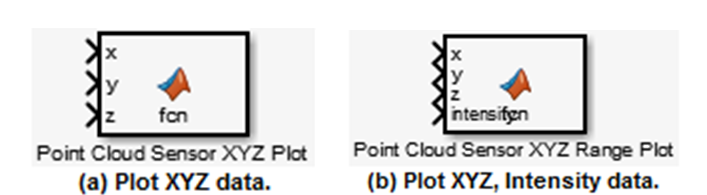
图5 点云数据可视化的两个模块
最后
以上就是彪壮心情最近收集整理的关于PreScan传感器(四)——Point Cloud Sensor1. 介绍2. PCS的配置3. PCS在Simulink中的输出的全部内容,更多相关PreScan传感器(四)——Point内容请搜索靠谱客的其他文章。








发表评论 取消回复