串口通信(Serial Communications)是指外设与计算机间,通过数据线按位进行传输数据的一种通讯方式。尽管比按字节(byte)的并行通信慢,但是串口可以在使用一根线发送数据的同时用另一根线接收数据。虽然串口通信传输速度不高,但程序简单,能实现远距离通信且成本较低,通信长度可达1200米。常用的仪器仪表大多都支持串口通信协议。
LabVIEW的自带函数库中有现成的串口通信模块,方便快速搭建堪比串口调试助手的软件。
今天分享一个STM32F103C8T6工控板与LabVIEW的串口通讯实例,主要工作如下:
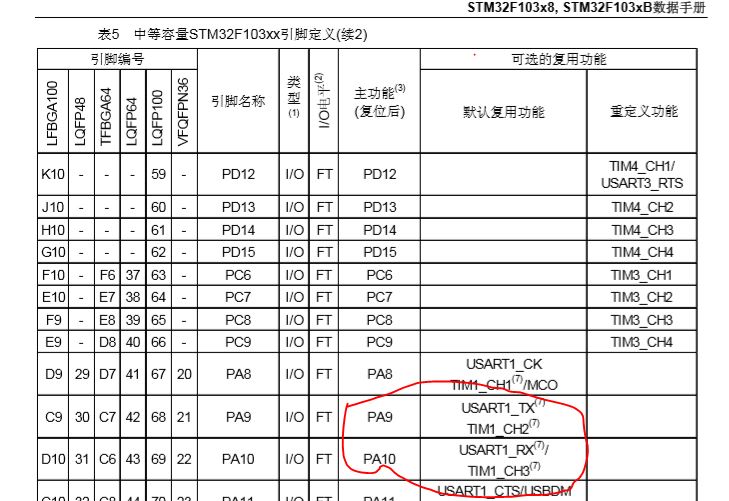
1)基于Keil MDK写一个串口通信程序,主要配置STM32F103C8T6芯片的USART1相关参数并创建串口1中断服务函数(对应引脚为PA9和PA10,可在手册中看到,如下图所示);
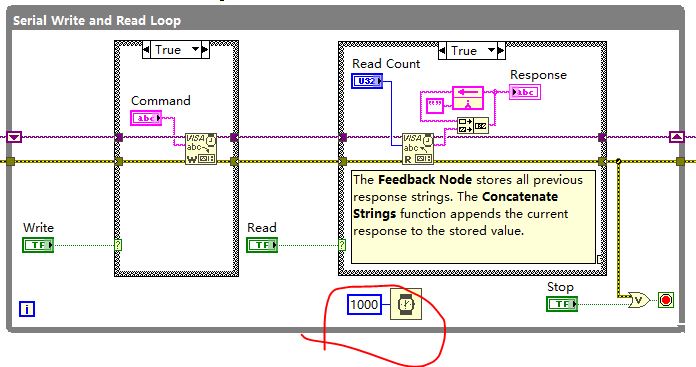
2)基于LabVIEW编写一个串口调试助手,用于与STM32F103C8T6工控板进行实时通信,具体使用的串口通信模块位于程序框图的函数选板–>Instrument I/O -->Serial里,如下图所示。

3)具体实现的功能为:从LabVIEW发送一个命令到STM32F103C8T6工控板中,然后STM32F103C8T6工控板不进行任何处理,将接收到的命令反馈给LabVIEW。
硬件部分
1)某宝网上购买的STM32F103C8T6工控板,价格50¥左右;
2)某宝网上购买的232转USB数据线(如下图所示),价格15¥左右。

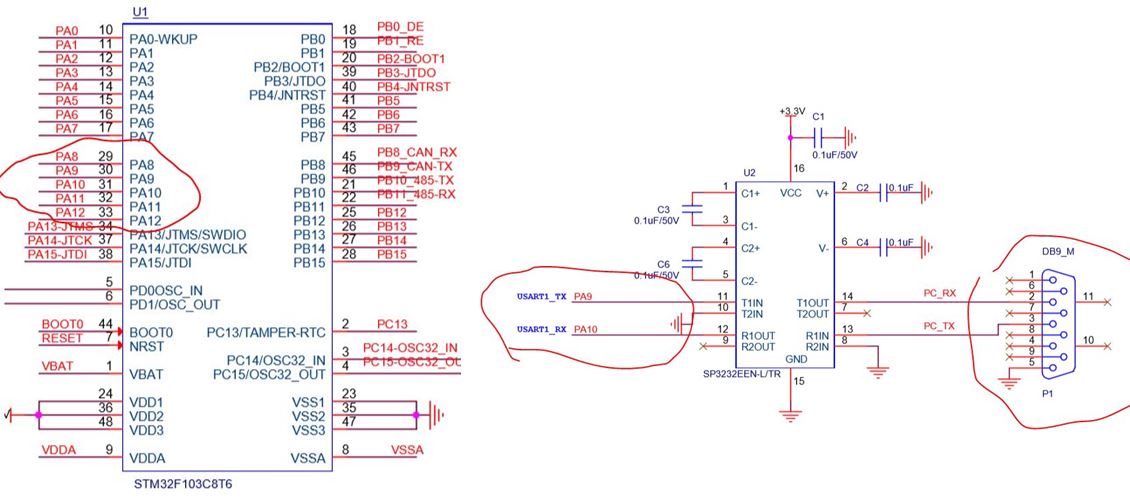
STM32F103C8T6工控板部分原理图
1)下图是STM32F103C8T6工控板的芯片接线,PA9和PA10对应USART1_TX和USART1_RX,PA9和PA10经SP3232EEN-L/TR芯片至9pin的接口处,如下图所示。
思路
1)对于STM32F103C8T6,配置并使能USART1,使能USART1更新中断并创建相关中断服务函数;
2)对于STM32F103C8T6,在接收到从LabVIEW发来的串口数据后,运行中断服务函数,将接收到的数据传回LabVIEW;
3)对于LabVIEW,配置串口通信,相关参数(如波特率、校验位、停止位等必须与STM32F103C8T6的USART1配置的参数一样!!!
4)对于LabVIEW,利用事件结构的while循环,每当发送命令的控件发送一次串口数据时,并接收一次串口数据。
相关代码
1)针对STM32F103C8T6工控板
- 串口初始化配置函数(头文件)
该头文件只包含一个函数,即针对串口1的初始化配置函数,用于跟电脑进行串口通信:
/**
******************************** STM32F10x *********************************
* @文件名称: serial_communication.h
* @作者名称: 闲人Ne
* @库版本号: V3.5.0
* @工程版本: V1.0.0
* @开发日期: 2021年1月17日
* @摘要简述: serial_communication头文件
******************************************************************************/
/*----------------------------------------------------------------------------
* @更新日志:
* @无
* ---------------------------------------------------------------------------*/
#ifndef __SERIAL_COMMUNICATION_H
#define __SERIAL_COMMUNICATION_H
/* 函数申明 ------------------------------------------------------------------*/
void My_USART1_Init(void);
#endif /* __SERIAL_COMMUNICATION_H */
/****** Copyright (C)2021 闲人Ne. All Rights Reserved ****** END OF FILE *******/
- 串口初始化配置函数(源文件)
串口初始化配置常规操作,大家可作为范例参考:
/**
******************************** STM32F10x *********************************
* @文件名称: serial_commuication.c
* @作者名称: 闲人Ne
* @库版本号: V3.5.0
* @工程版本: V1.0.0
* @开发日期: 2021年1月17日
* @摘要简述: serial_communication源文件
******************************************************************************/
/*-----------------------------------------------------------------------------
* @更新日志:
* @无
* ---------------------------------------------------------------------------*/
/* 包含的头文件 ---------------------------------------------------------------*/
#include "serial_communication.h"
#include "nvic_configuration.h"
#include "stm32f10x.h"
/************************************************
函数名称:My_USART1_Init()
函数功能:初始化USART1管脚配置,
入口参数:无
返回参数:无
开发作者:闲人Ne
*************************************************/
void My_USART1_Init(void)
{
GPIO_InitTypeDef GPIO_InitStruct;
USART_InitTypeDef USART_InitStruct;
// 第一步,使能相关时钟
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA, ENABLE); // 使能GPIOA时钟
RCC_APB2PeriphClockCmd(RCC_APB2Periph_USART1, ENABLE); // 使能USART1时钟
// 第二步,串口复位
USART_DeInit(USART1); // 将外设 USARTx寄存器重设为缺省值,复位USART1
// 第三步,GPIO端口模式设置,PA9对应TX,PA10对应RX
GPIO_InitStruct.GPIO_Mode=GPIO_Mode_AF_PP; // 复用推挽输出
GPIO_InitStruct.GPIO_Pin=GPIO_Pin_9; // 选择GPIO引脚9,作为发送端
GPIO_InitStruct.GPIO_Speed=GPIO_Speed_10MHz; // 随意设置,不重要
GPIO_Init(GPIOA,&GPIO_InitStruct);
GPIO_InitStruct.GPIO_Mode=GPIO_Mode_IN_FLOATING; // 浮空输入
GPIO_InitStruct.GPIO_Pin=GPIO_Pin_10; // 选择GPIO引脚10,作为接收端
GPIO_InitStruct.GPIO_Speed=GPIO_Speed_10MHz; // 随意设置,不重要
GPIO_Init(GPIOA,&GPIO_InitStruct);
// 第四步,串口1参数初始化,在电脑上进行串口通信时,串口调试软件也需按下述参数设置
USART_InitStruct.USART_BaudRate=115200; // 波特率为115200
USART_InitStruct.USART_HardwareFlowControl=USART_HardwareFlowControl_None; // 不使用硬件流控制
USART_InitStruct.USART_Mode=USART_Mode_Rx | USART_Mode_Tx; // 收发都使能
USART_InitStruct.USART_Parity=USART_Parity_No; // 不用奇偶校验位
USART_InitStruct.USART_StopBits=USART_StopBits_1; // 设置1个停止位
USART_InitStruct.USART_WordLength=USART_WordLength_8b; // 设字长为8,因为不用奇偶校验
USART_Init(USART1,&USART_InitStruct);
// 第五步,初始化NVIC,开启指定中断
NVIC_Configuration();
USART_ITConfig(USART1,USART_IT_RXNE,ENABLE); // 使能USART1的USART_IT_RXNE中断,RXNE是状态寄存器USART_SR的第5位,意思是接收中断
// 第六步,使能串口
USART_Cmd(USART1,ENABLE); // 使能USART1外设
}
/****** Copyright (C)2021 闲人Ne. All Rights Reserved ****** END OF FILE *******/
- 串口1中断服务函数
通过上面可知,在串口1初始化配置时,使能了串口1的接收中断,因此需要编写对应的中断服务函数。
/**********************************************************************************
函数名称:USART1_IRQHandler()
函数功能:USART1中断,当STM32F103C8T6通过串口1接收到从电脑发来的串口数据时,将所收到的数据再发回去。
入口参数:无
返回参数:无
开发作者:闲人Ne
***********************************************************************************/
void USART1_IRQHandler(void) // 函数名称是由startup_stm32f10x_hs.s文件里定义的
{
u8 data;
if(USART_GetITStatus(USART1,USART_IT_RXNE)) // 检查USART1的接受中断USART_IT_RXNE发生与否
{
data=USART_ReceiveData(USART1); // 返回USART1最近接收到的数据
USART_SendData(USART1,data); // 通过外设USART1发送单个数据
}
}
- 中断优先级配置
既然有中断服务函数,那么必须先进行中断优先级配置:
/************************************************
函数名称:NVIC_Configuration()
函数功能:中断优先级配置
入口参数:无
返回参数:无
开发作者:闲人Ne
*************************************************/
void NVIC_Configuration(void)
{
NVIC_InitTypeDef NVIC_InitStruct;
// 串口1中断优先级配置
NVIC_InitStruct.NVIC_IRQChannel=USART1_IRQn; // 选择位于stm32f10x.h文件中STM32F10X_HD中的USART1_IRQn
NVIC_InitStruct.NVIC_IRQChannelCmd=ENABLE; // 使能上述中断通道
NVIC_InitStruct.NVIC_IRQChannelPreemptionPriority=1; // 因为没有别的中断,参数可设0~3之间
NVIC_InitStruct.NVIC_IRQChannelSubPriority=1; // 因为没有别的中断,参数可设0~3之间
NVIC_Init(&NVIC_InitStruct);
}
- 主函数
/**
******************************** STM32F10x *********************************
* @文件名称: main.c
* @作者名称: 闲人Ne
* @库版本号: V3.5.0
* @工程版本: V1.0.0
* @开发日期: 2021年1月17日
* @摘要简述: 主函数
******************************************************************************/
/*-----------------------------------------------------------------------------
* @更新日志:
* @无
* ---------------------------------------------------------------------------*/
/* 包含的头文件 --------------------------------------------------------------*/
#include "led.h"
#include "sys.h"
#include "delay.h"
#include "serial_communication.h"
#include "nvic_configuration.h"
/*********************************************************************************
函数名称:int main()
函数功能:主函数,LED灯每隔500ms改变一次状态,表示系统正常运行,串口数据收发由中断控制
入口参数:无
返回参数:int
开发作者:闲人Ne
**********************************************************************************/
int main(void)
{
delay_init();
LED_Init();
NVIC_PriorityGroupConfig(NVIC_PriorityGroup_2); // 中断优先级配置
My_USART1_Init();
D1=1; // LED1灭
D2=0; // LED2亮
while(1)
{
D1=!D1;
D2=!D2;
delay_ms(500);
}
}
/****** Copyright (C)2021 闲人Ne. All Rights Reserved ****** END OF FILE *******/
2)针对LabVIEW上位机
LabVIEW工程可参考范例:Continuous Serial Write and Read.vi,该范例是最简的连续串口通信范例,在程序框图钟进行简单的修改:即在最后的While循环里添加等待1000ms模块(如下图所示)
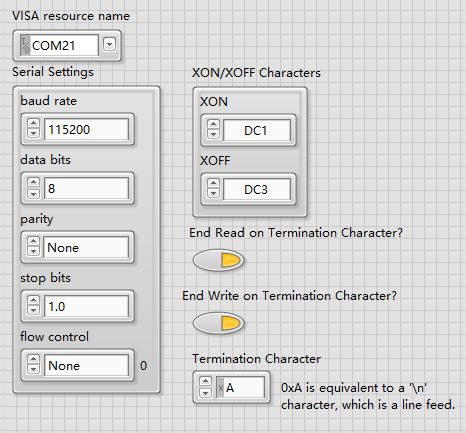
回到该范例的前面板,硬件连接好后,首先先选择com端口(如下图所示:COM21),然后按照之前在STM32F103C8T6工控板上的串口配置参数进行配置,如波特率设为115200等,其他参数默认即可。
实验效果
运行前,将LabVIEW前面板上的Write和Read控件设为真(即激活发送和接收功能),先烧入STM32F103C8T6工控板的程序并运行,然后运行LabVIEW程序,运行结果如下图所示:
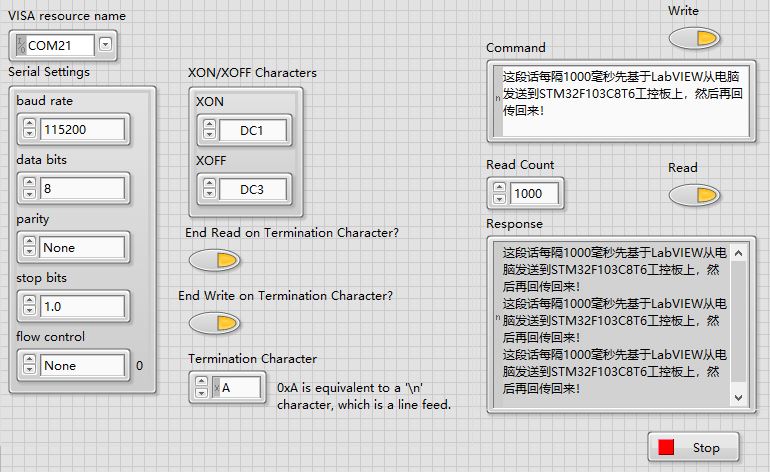
当Response显示字符串的控件每隔1000毫秒接收到一次串口数据时,则证明串口通信成功。
经验分享
- 在进行嵌入式开发时,利用仿真器Debug程序是首选方案,当然利用串口调试助手查程序的问题也是工程师比较喜欢的手段;
- 可以利用LabVIEW,串口通信为一些嵌入式开发板开发定制化的上位机软件:如开发板的功能是采集一些实验数据,利用LabVIEW为期开发一个上位机软件,通过串口通信获取开发板采集的数据,然后记录,生成报告等。这对于实验室一些非标测试的项目,开发的成本是很亲民的~
最后
以上就是神勇绿茶最近收集整理的关于STM32兴趣篇四:STM32F103C8T6工控板与LabVIEW的串口通讯实例的全部内容,更多相关STM32兴趣篇四:STM32F103C8T6工控板与LabVIEW内容请搜索靠谱客的其他文章。








发表评论 取消回复