以前读书的时候学习自动控制原理,就是为了考试,各种相频幅频特性题咣咣做,一点都不含糊,但是实际代表什么意义一点都不知道。现在真是发现,这个东西有用得一批。这篇文章从一阶惯性环节为切入点,对自动控制原理进行一个简单的复习。还蛮喜欢博客里面写东西的,按照自己思路,按照逻辑一点一点往下,不像发文章八股文一样。
1 一阶惯性环节的bode图
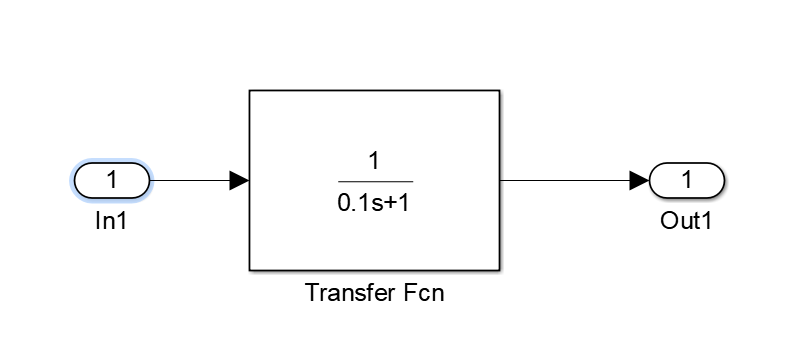
对于这个非常常见的一阶惯性系统而言,其关键指标就是截止频率。
转折频率:s系数前面的倒数,分母一定是 n*s + 1 的形式。
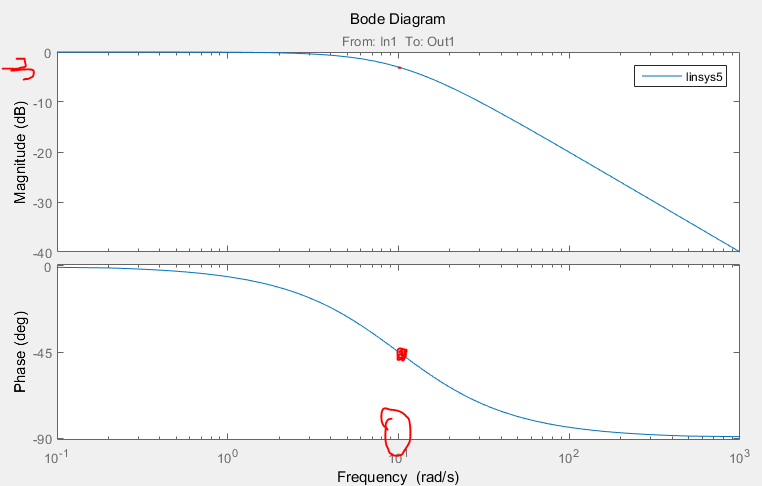
截止频率的定义:从频域响应的角度讲,当保持输入信号的幅度不变,改变频率使输出信号降至最大值的0.707倍,即用频响特性来表述即为-3dB点处即为截止频率。通俗的的讲就是幅频特性-3dB的点和相频特性滞后45°(-45°)的点。
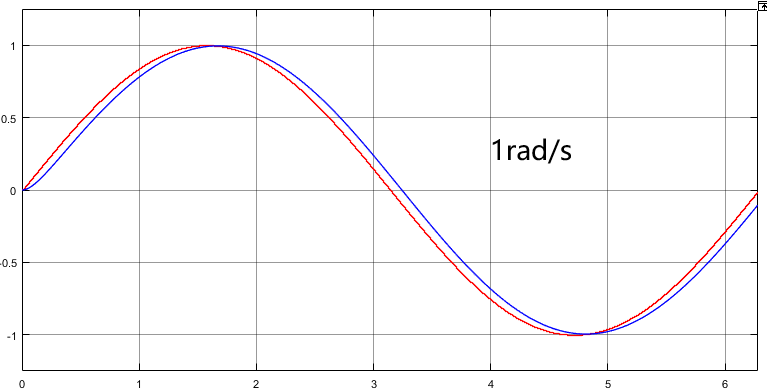
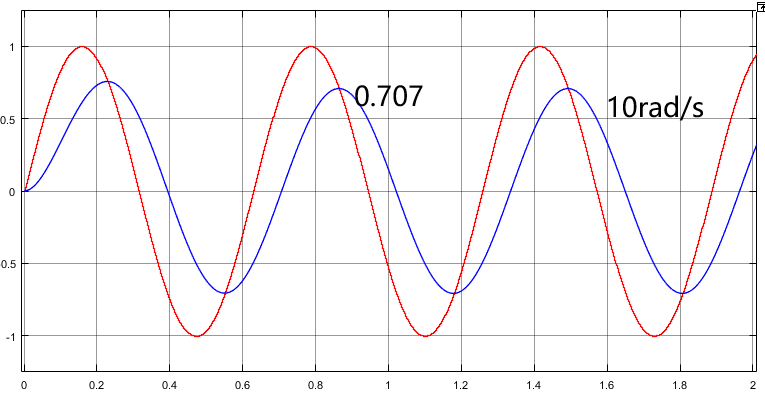
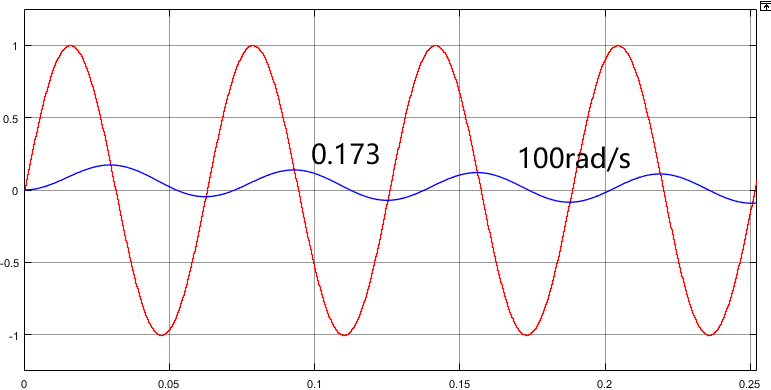
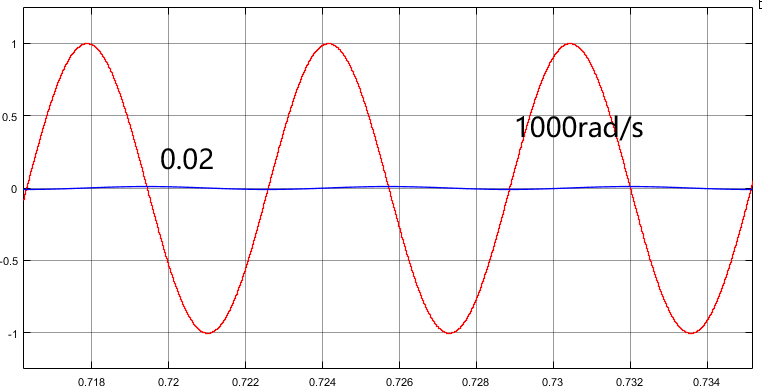
我们具体的看看不同频率的输入在经过以上一个一阶惯性环节之后的效果。如下面四张图所示,截止频率以前,1rad/s时输出信号的保真度较高,基本能够实现跟随;在截止频率10rad/s处幅值降至0.707,相位滞后45°;100rad/s时,幅值降至0.173,相位滞后将近80°;1000rad/s基本已经没有响应了。证明截止频率对输入信号的响应性能能够提供直接指标。
2 开环增益与截止频率对bode图的影响
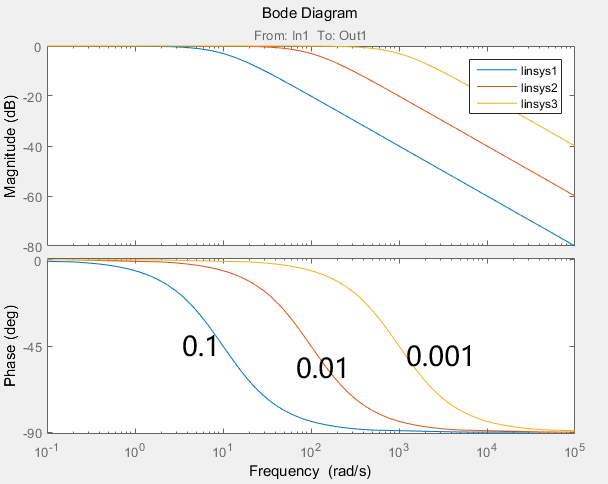
2.1 更改转折频率
更改s的系数之后,观察一阶惯性环接的相幅特性,可以看到,截止频率随着系数减小在逐渐右移,右移也代表着转折频率逐渐增大。其实这个地方我们可以把s前面的系数理解为采样时间,其实采样时间越小,采样频率越高,这个可以跟随的频率也就更高,这也是为什么高采样率的系统,高控制频率的系统他的性能更好的原因。可能0.01就可以能够很好跟随10rad/s的输入,但是如果是0.00001就能够更好的跟随了。这也是这么多年FPGA能够逐渐占领市场的原因。
2.1 更改开环增益
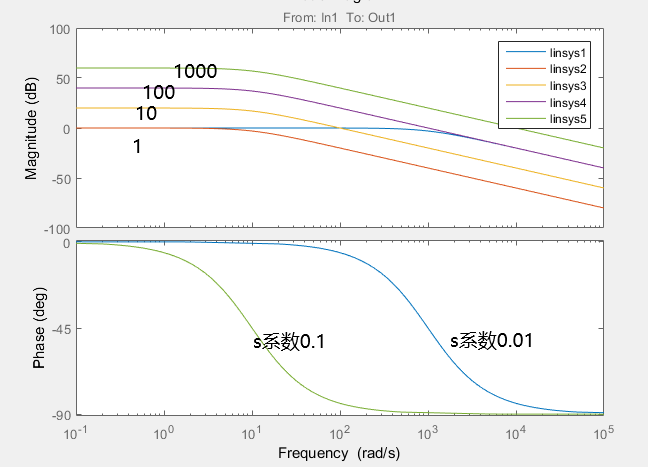
上图中一直都是按照开关增益为1来进行实验的,现在看看开环增益对相幅特性的影响。这张图蓝色的线是s系数为0.01,也就是转折频率为100的曲线,其他四个是转折频率为10的曲线。观察下图可以得到一下两个结论:
1、增大一阶惯性环节的开环增益,会导致幅频曲线上移,导致幅频曲线与横轴0的交点右移,也就是截止频率wc增大。
2、增大一阶惯性环节的开环增益,不会对相频曲线产生任何影响。相频曲线只和s前的系数有关,只和转折频率有关。
从以上的分析我们可以得到结论:
1、截止频率对于一阶惯性而言,意味着信号响应性能的转折点,截止频率以前均能够较好的跟随,但是截止频率之后,输入信号被大幅度衰减。
2、伯德图能够对系统的响应特性进行一个直观的分析。(搞数学的真厉害啊)
3、增大一阶惯性环节的开环增益,会导致幅频曲线上移,导致幅频曲线与横轴0的交点右移,也就是截止频率wc增大。
4、增大一阶惯性环节的开环增益,不会对相频曲线产生任何影响。相频曲线只和s前的系数有关,只和转折频率有关。
整理不易,希望大家帮忙点个赞呀~谢谢啦~^_^
参数整定以及自动控制原理系列文章:
永磁同步电机矢量控制到无速度传感器控制学习教程(PMSM)(一)
如何用matlab画bode图——自动控制原理基础补充(一)
一阶惯性环节的性能分析——自动控制原理基础补充(二)
二阶系统的性能分析(开环相幅和阶跃响应)——自动控制原理基础补充(三)
转速环PI参数整定详解(一)——电机传递函数的来源
转速环PI参数整定详解(二)——转速环各个环节传递函数的来源
转速环PI参数整定详解(三)——转速环开环传函特性及其整定策略
最后
以上就是明理小懒虫最近收集整理的关于一阶惯性环节的性能分析——自动控制原理基础补充(二)的全部内容,更多相关一阶惯性环节内容请搜索靠谱客的其他文章。








发表评论 取消回复