如果您想使用MPC控制器控制您的系统,但不确定哪些方法可用? 那么,请继续阅读本文章,因为我会给您提供一些方法。
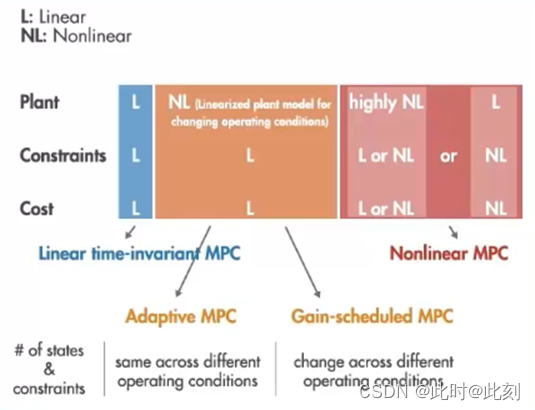
我首先要从煎饼配方开始,如果您耐心等待一会儿,您会看到它与MPC的联系。如果您有面粉、鸡蛋和牛奶,就可以做煎饼,很多人以前都试过这个配方,这很简单,不会出错。同样,如果您有一个由线性被控对象模型表示的线性系统,并且您有线性约束和二次成本函数,那么您可以使用线性时不变 MPC 来控制您的系统。
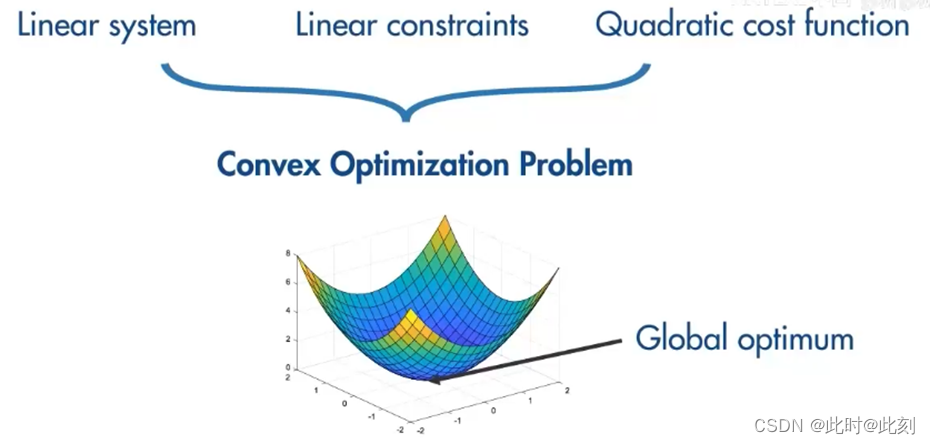
具有这些良好特性的 MPC问题会产生凸优化问题,其中成本函数具有单个全局最优值,而优化的目标是找到这个最优值,这是一个经过充分研究的问题,您可以使用多种数值方法和软件来解决它。
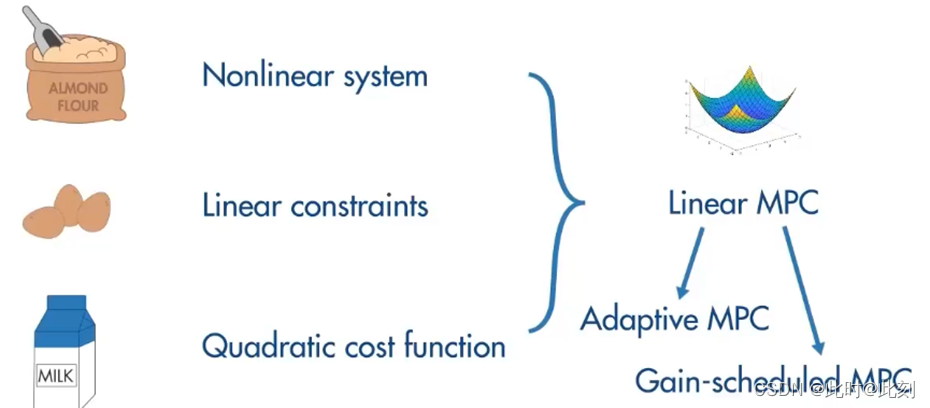
让我们回到煎饼上︰如果您只有杏仁粉而不是面粉怎么办? 还能做煎饼吗?是的,可以! 同样,如果您处理的系统不是线性而是非线性的,您也可以使用线性MPC,并且仍然受益于凸优化问题的良好特性,在这种情况下可用的方法是自适应 MPC 控制器和增益调度MPC 控制器。
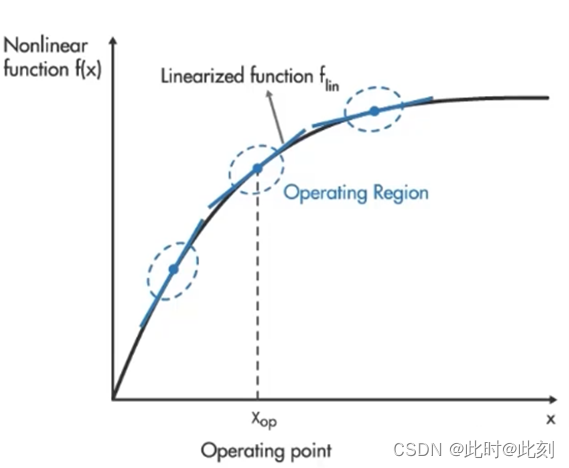
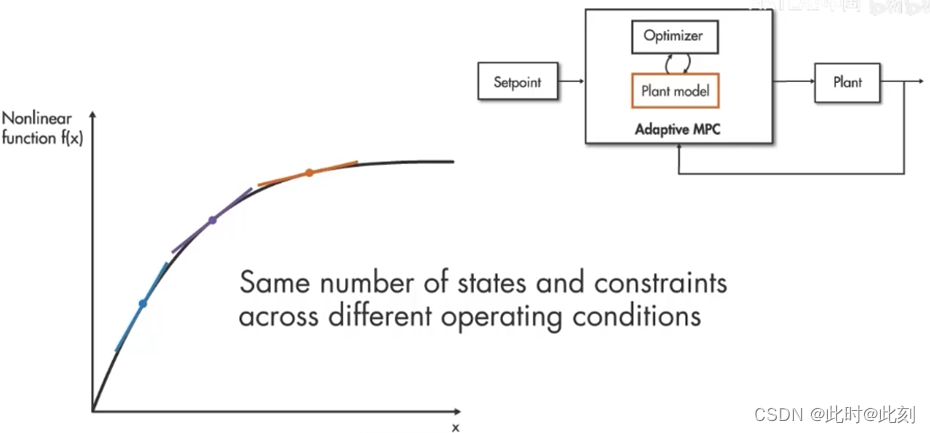
这些控制器处理非线性系统的方式基于线性化。例如,让我们看看这个非线性函数,我们可以在一个工作点对其进行线性化,这为我们提供了一个线性函数,该函数在工作点附近很好地逼近非线性系统,但是,在该区域之外,我们发现的线性函数将无法正常工作。因此,我们通常感兴趣的是找到多个线性化模型,每个模型都能很好地表示其工作点附近的非线性函数。
这是我们之前讨论过的常规 MPC 控制图(如下图所示),它使用内部被控对象模型和优化器来计算控制动作。在自适应MPC 中,线性模型是随着工作条件的变化而动态计算的,并且在每个时间步长,您都可以使用此线性模型更新。MPC控制器使用的内部被控对象模型,请注意,在自适应MPC 中,优化问题的结构在不同的工作点上保持不变。这意味着在预测范围内,状态数量和约束数量不会因不同的操作条件而改变。
但是,如果它们确实发生了变化,则应使用增益调度MPC。在增益调度MPC 中,您可以在感兴趣的工作点进行离线线性化,并为每个工作点设计一个线性MPC控制器。每个控制器彼此独立,因此可能具有不同数量的状态和不同数量的约束。请注意,在这种方法中,您还需要设计一种算法,针对不同的工作条件在预定义的 MPC控制器之间进行切换。
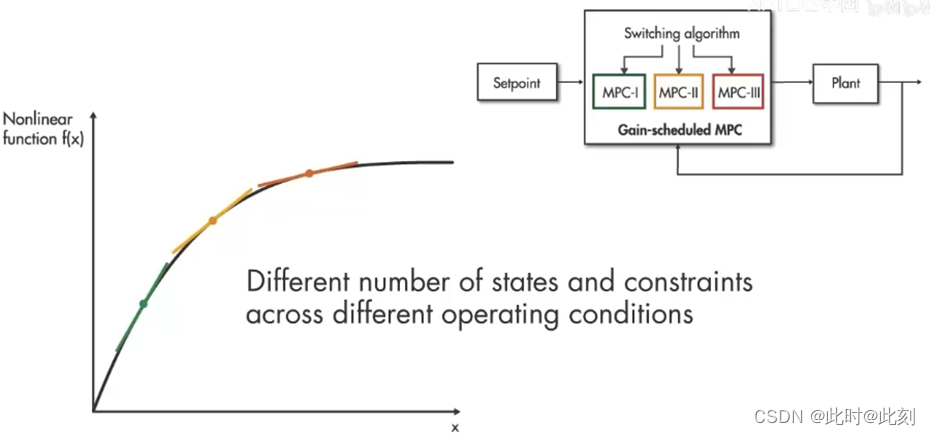
尽管拥有独立控制器是增益调度 MPC的一个优势,但它使用的内存要比自适应 MPC多。因此,如果可以在运行时找到线性被控对象模型,并且优化问题的结构在不同的工作条件下保持不变,建议使用自适应MPC。如果结构发生变化,则可以使用增益调度MPC,通过设计独立的MPC控制器来适应不断变化的工作条件。
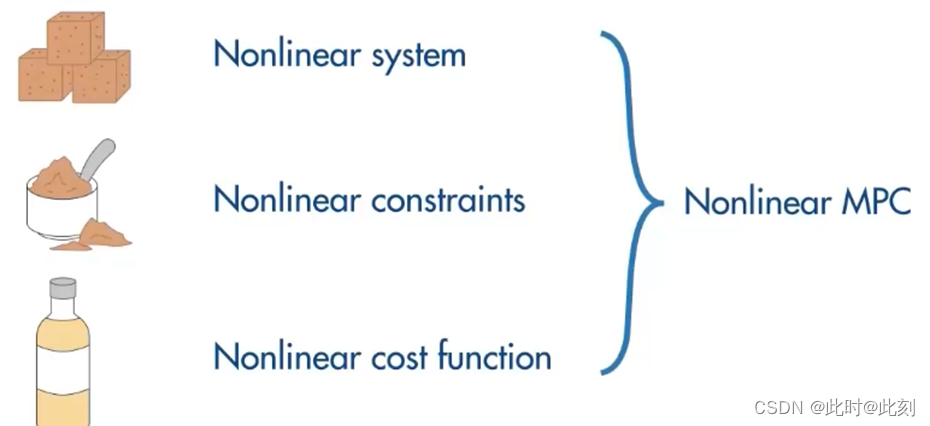
现在让我们再次回到煎饼。假设您没有用来烘焙的常规食材,但有一些您甚至都不熟悉的非常独特的原料,用这些原料制作煎饼会颇具挑战性,但一旦您知道怎么做,它将是有史以来最好吃的煎饼。如果您有一个非线性系统不能用线性模型很好地逼近,那么您可以使用非线性 MPC。这是最有效的方法,因为它使用最准确的被控对象表示,即非线性被控对象模型,因此,控制器做出的预测更准确,这也会实现更好的控制动作。
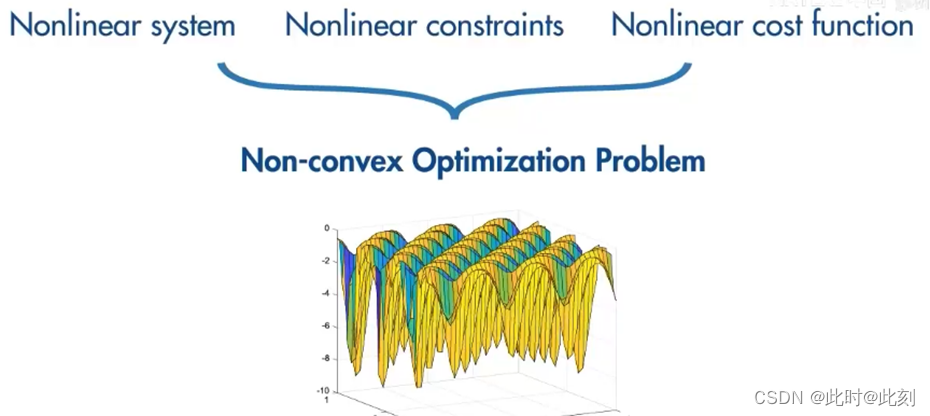
但是,它在实时求解方面最具挑战性,因为当您有非线性约束和非线性成本函数时,优化问题就变得非凸了,成本函数可能有多个局部最优解,找到全局最优解可能很困难。对需要大量计算的非凸优化问题的求解效率,取决于您拥有的非线性求解器。
总而言之,如果您处理的被控对象是非线性的,但可以通过线性模型逼近,则可以使用自适应MPC 控制器和增益调度 MPC 控制器。如果优化问题的结构在不同的工作条件下没有变化,则应使用自适应 MPC;但是,如果该结构有变化,则使用增益调度 MPC;如果因您有一个无法通过线性化进行良好逼近的高度非线性系统,从而导致以上这些方法都不起作用,则可以使用非线性MPC。
在下一篇文章中,我们将讨论更快地运行模型预测控制器的实现技巧。
文章内容的视频地址如下:
【Model Predictive Control】了解模型预测控制,第四部分:自适应、增益调度和非线性 MPC - MATLAB&Simulink_哔哩哔哩_bilibili
最后
以上就是可耐酸奶最近收集整理的关于了解模型预测控制4--自适应,增益调度和非线性MPC的全部内容,更多相关了解模型预测控制4--自适应内容请搜索靠谱客的其他文章。








发表评论 取消回复