资料来源:南京沃旭通讯科技有限公司
1、 基于测距的定位方案;
定位标签和定位基站逐一测距,得到所有的距离数据之后,服务器计算标签的位置。
2、 基于到达时间差(TDOA)的定位方案
基站时间同步之后,标签只需要发送一个广播报文,所有基站将收到这个报文的时间戳发送到服务器,服务器计算标签的位置。
1 定位系统逻辑单元
定位系统由至少三个逻辑单元组成:
定位标签:即被定位设备;
定位基站:信息收集单元;
定位服务器:位置计算单元;
2 进入检测
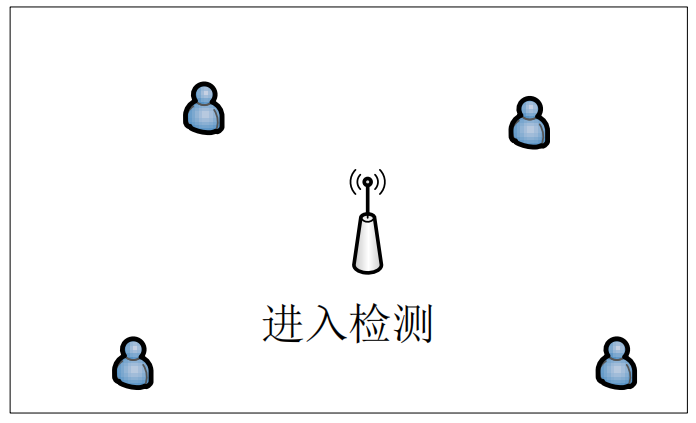
这种模式,主要是用于检测目标是否在指定区域。这种模式,只需要一个基站,标签和基站进行测距即可完成。
3 按维定位
根据应用场景的不同,可以实现一、二、三维定位。
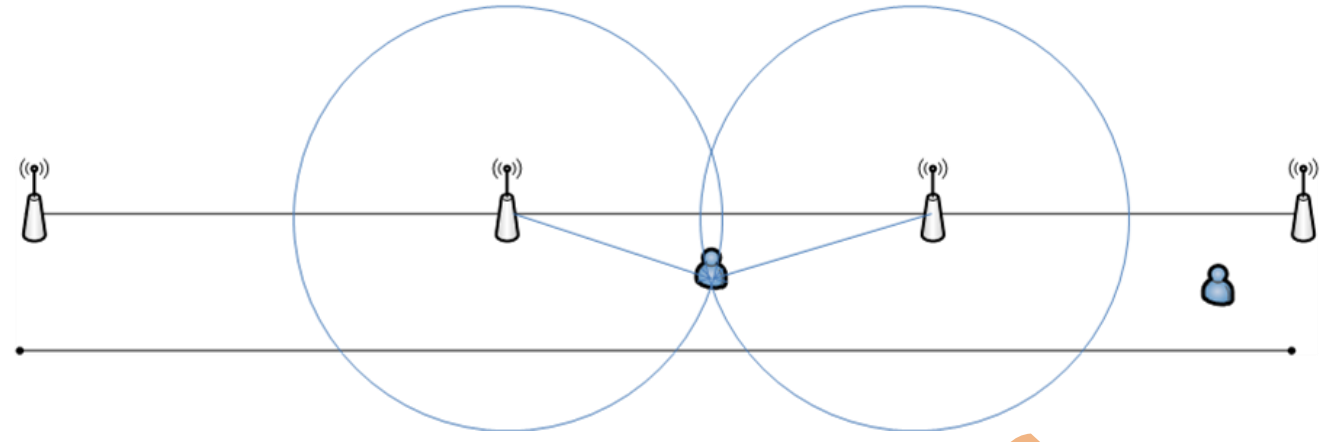
3.1 一维定位
典型应用为巷道定位,只需要定位目标在这个巷道的相对位置。一般会忽略巷道的宽度。

在这种模式下,可以采用基站时间同步的方式实现一维定位。
3.2 二维定位
二维定位需要确定在空间的 X、Y 坐标。分两种情况
1、 类似于道路的伪二维定位
和一维定位非常类似,但采用测距的方式实现定位功能。通过标签离基站的距离,计算标签的位置,有于场景的特殊性,可以计算出标签的最终位置。
2、 标准二维定位
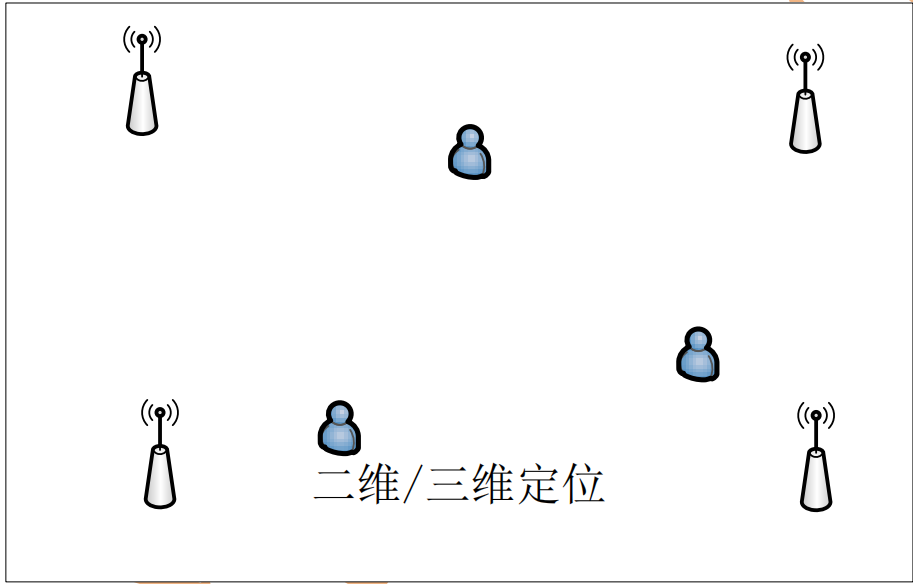
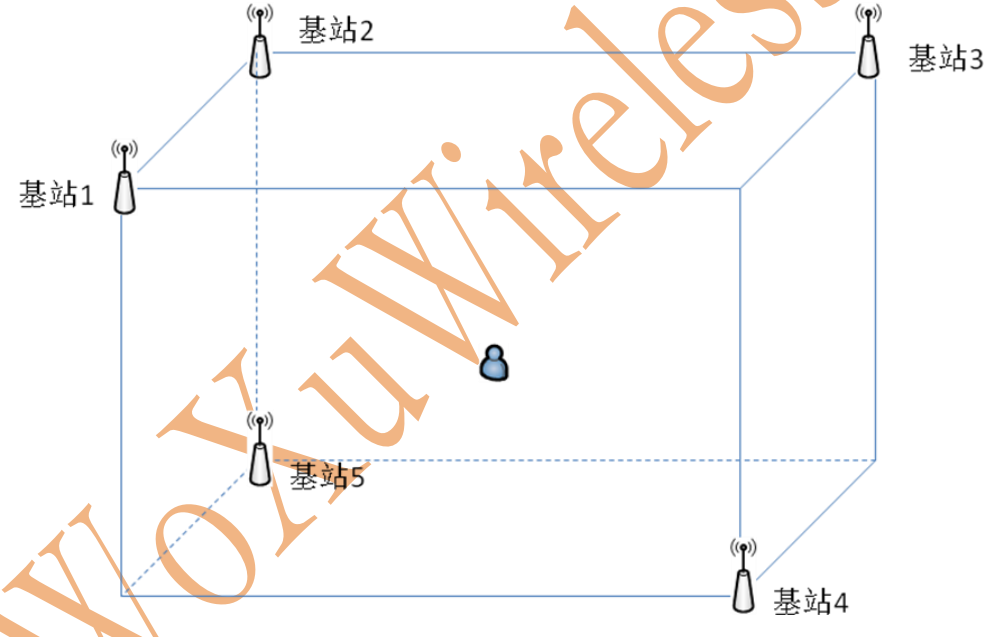
通过三个以上的基站,确定区域内的标签的位置。可以得出基站的二维坐标。在这个系统中,由于只有二维坐标,需要关注“垂直投影”带来的误差。如下图:
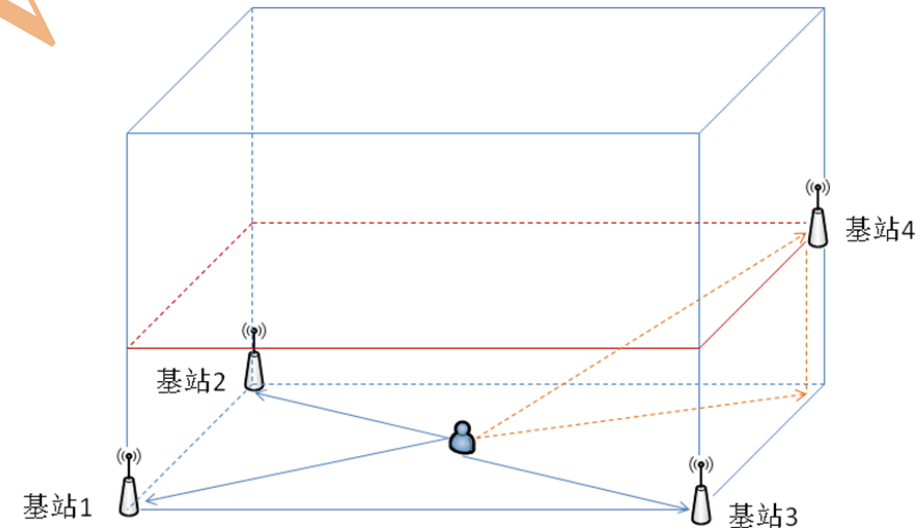
基站 4 和其他基站不在同一个平面上,若做测距,得到的是标签和基站4 的斜边的距离,需要通过投影到平面进行计算。
3.3 三维定位
实现三维定位,需要求出被定位设备的 XYZ 三维坐标,在基站架设的时候,需要特别拉开 Z 轴的高度差,以确保在 Z 轴上的精确度。若用测距的方式,三个基站就可以完成三维定位,用 TDOA 的方式,必须要四个以上基站才能完成。
4 方案优势与不足
4.1 基于测距的不足
在上文中提到,采用测距的方式,标签需要和基站逐个测距,然后才能完成定位。在 6.8Mbps 的工作速率下,完成一次 TWR 测距,需要 2ms,若有 4 个基站,完成一轮测距需要 8 ms。导致系统容量比较低;
另外一个方面,由于测距需要多次的报文发送,和较长的等待接收的时间,系统的功耗增加,导致电池的待机时间变短。
但基于测距的系统,由于不需要时间同步,其实施相对简单,容易上手。
4.2 TDOA的优势与不足
相对于测距,TDOA 每次定位,只需要发送一个广播报文,即可完成定位。
其容量远高于基于测距模式,同时,功耗也极大降低。理想情况下,按 1Hz 计算,系统容量可以达到 1500 个标签。
但 TDOA 实现难度更大,时间同步要求比较高。需要达到 0.2ns 以下,才能有效的保障系统精度。沃旭通讯提供无线时间同步的方式,系统定位精度达到30 厘米。
但 TDOA 也有不足,有一些场景无法适用于 TDOA,比如,基站在中间,标签在基站外围的情况下,其定位精度比较差,TDOA 不适用。
5 场景分析
方案选择
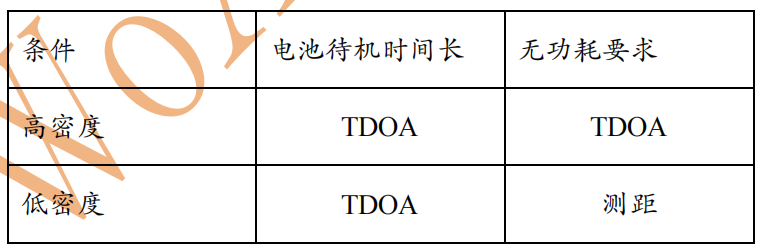
如何提高基于测距的系统容量:
由于 UWB 目前不支持 CSMA,同时也为了确保系统的容量,若采用自由冲突的方式,进行测距定位,系统的容量非常低。可以通过增加一个中间点,来控制标签的测距流程,以增加系统的容量。比如,在刚才的例子中,若一轮测距需要 8ms,1Hz 的工作模式下,可以达到 125 个标签的容量。
如何解决基站在中间,标签在外围的定位
在这种模式下,无法采用 TDOA 的方式实现定位,因为 TDOA 的方式,标签在外围的时候得到的精度会比较差,误差将超过 1 米以上,系统可用性会比较差。在这个模式,主要采用测距的方式来实现,但是测距的模式需要优化,如何在测距的同时,降低测距所需要的时间。
最后
以上就是潇洒书包最近收集整理的关于UWB 定位技术方案选择1 定位系统逻辑单元2 进入检测3 按维定位4 方案优势与不足5 场景分析的全部内容,更多相关UWB内容请搜索靠谱客的其他文章。








发表评论 取消回复