2021年的9月底收到老师的委托之后,开始着手使用MATLAB探索开发一些实验,控制对象为ROS中的仿真小车
为什么要用MATLAB呢?因为这个实验是面向机器人专业的全体学生的,而不是个别学生,这就意味着如果直接使用ROS开发,那么部分没有接触过ROS,零基础的同学可能会感到比较吃力,而如果仅仅是把程序给他们,让他们运行一下,看看效果,估计收获甚微,为了让全体同学都自己动手去完成实验内容,选择了大家比较熟悉的MALTAB作为开发工具,依托SImulink中的ROS工具箱与ROS建立联系,并在此基础上探索开发一些实验去控制ROS中的小车
在明白了大体的任务后,就开始构思如何实现了,说实话,刚接到任务后,确实感觉无从下手,先说一下我的ROS基础,2020年的10月份,我学习了古月居的ROS入门21讲,利用课余时间大约学了一个月左右,这就是当时我所有的ROS基础,是不是少的可怜?
对了,我还有对ROS机器人的无限热爱, 因为热爱,所以无所畏惧。 我大体整理了一下思路,我将整个实现过程规划为以下几个阶段
第一阶段:建立MATALB与ROS的通讯
第二阶段:在虚拟机的Gazebo中进行小车仿真的可行性验证
第三阶段: 探索建立Simulink与Gazebo中仿真小车的通讯
第四阶段: 探索在Simulink中设计实验来控制Gazebo中小车
第五阶段: 将在Simulink中设计的实验生成ROS代码
第六阶段: 推广测试阶段
第七阶段: 探索对实物进行控制
2021年10月1日,我正式开始了第一阶段的探索
首先,便是ROS的安装,综合考虑之下,决定采用虚拟机安装的方式,VMware16.1.1+Ubuntu20.04+ROS Noetic,我2020年10月份学习的时候装过,也踩过了很多的坑,整理成了博客,链接如下:
详细介绍如何在ubuntu20.04中安装ROS系统,以及安装过程中出现的常见错误的解决方法,填坑!!!【点击可跳转】
今年,我又将其安装步骤进行了优化处理,整个VMware16.1.1 +Ubuntu20.04+ROS Noetic的安装过程压缩到了三个小时以内,同样编写了博客,链接如下:
详细介绍如何在ubuntu20.04中安装ROS系统,超快完成安装(最新版教程)【点击可跳转】
刚开始的时候,是想采用Ubuntu下的MATLAB与ROS进行联合仿真的,耗时三天,在踩过一个个坑之后终于在Ubuntu中装好了MATLAB2021a,于次日借助小海龟,实现和验证了MATLAB与ROS的通讯,相关博客链接如下:
虚拟机中的Ubuntu扩容及重新分区方法【点击可跳转】
在ubuntu20.04中安装MATLAB时常见问题及解决方法 【点击可跳转】
详细介绍如何在Ubuntu中实现MATLAB与ROS的通讯,借助MATALB进行ROS开发【点击可跳转】
此时考虑到,部分同学电脑硬件也许很难支持在虚拟机中同时运行MATLAB/Simulink+Gazebo+Rviz,尤其是进行Slam建图及导航相关的实验
不得不暂时放弃该方案,转而采用Win10下的MATLAB与虚拟机Ubuntu20.04中的ROS联合仿真的方案,并成功实现通讯,相关的博客链接如下:
实现Win10环境下的MATLAB与虚拟机Ubuntu中的ROS的通讯的方法 【点击可跳转】
2021年10月7日,我开始了第二阶段的探索
这一阶段,本来的设想是快速验证一下在虚拟机的Gazebo中进行小车仿真的可行性,于是购买了古月学院的《如何在Gazebo中实现阿克曼转向车的仿真》课程,拿到了课程资料,但是遗憾的是课程资料在Noetic版本的ROS中并不能运行,报了一堆的错误,网上查了一下,并没有解决
于是,我开始了自学之路,经过一段时间的学习和探索,课程资料的代码差不多读了各遍,走过一个个Error,成功纠正了所有发现的错误(这些错误其实是由于ROS和Python等版本的更新带来的),同时也不断搭建着实验所需的实验环境,比如相关必备的ROS功能包等,相关博客链接如下:
以阿克曼转向车为例对URDF和XACRO文件进行解读 【点击可跳转】
将xacro格式文件转换为urdf格式并对其进行检查格式,并生成机器人模型的结构图 【点击可跳转】
古月学院《如何在Gazebo中实现阿克曼转向车的仿真》课程资料在ROS Noetic版本中运行时的常见错误及解决方法【点击可跳转】
日常工作记录—在虚拟机中进行slam建图 【点击可跳转】
在虚拟机中对阿克曼转向车进行导航及避障的仿真测试 【点击可跳转】
对了,这里还有一个坑,在我进行了一天的探索后,成功在Ubuntu20.04中装好了RoboWare Studio,却一直都打不开,后来才知道Ubuntu20.04不支持RoboWare Studio(停止维护了),确实很遗憾,无奈转而使用Visual Studio Code 作为IDE
2021年10月26日,我开始了第三阶段的探索
其实本来很多工作是计划在第三阶段完成的,却被迫在第二阶段完成了,比如由于第二阶段把整个程序差不多读了一遍(有些地方读了很多遍),可以说对程序很熟悉了,很容易就找到了程序中用于阿克曼小车的接口,也就是车的线速度和前轮打角,再加上第一阶段的通讯基础,很快就建立了MATLAB与ROS中的仿真小车的通讯,并成功将MATLAB/Simulink作为控制器,Gazebo中的仿真小车作为控制对象,进行了简单的走直线和画圈测试
2021年10月28日,我开始了第四阶段的探索
经过前三个阶段,实验所需求的实验环境就搭建好了,在差不多一个月的时间里,我的理论基础和ROS开发能力有了很大的进步,当然这些进步是建立在独立解决一个个Error之上的
到这里,也就要正式开始实验相关内容的开发了,说到MATLAB与ROS的联合仿真,在网上很难找到想要的资料,可以说基本没有(或者说我没找到),更不用说适合ROS零基础的本科生的实验了,还是那句话 因为热爱,所以无所畏惧。 于是我开始了一边构思实验内容,一边探索的自研之路
为了让同学们自己动手去实现实验内容,这部分的内容,我并没有写成博客在网上进行公布,但是在这部分的整个开发过程,我花费大量的时间写成了非常非常详细的文档资料,包括开发过程中的常见错误及解决方法等,后续有机会可能已博客形式发布出来,但是应该是在很长一段时间之后了
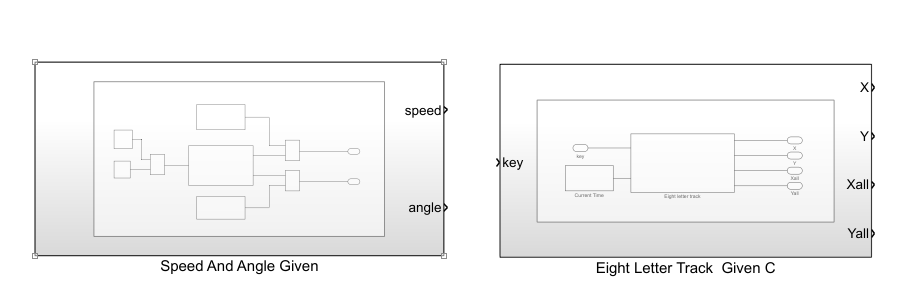
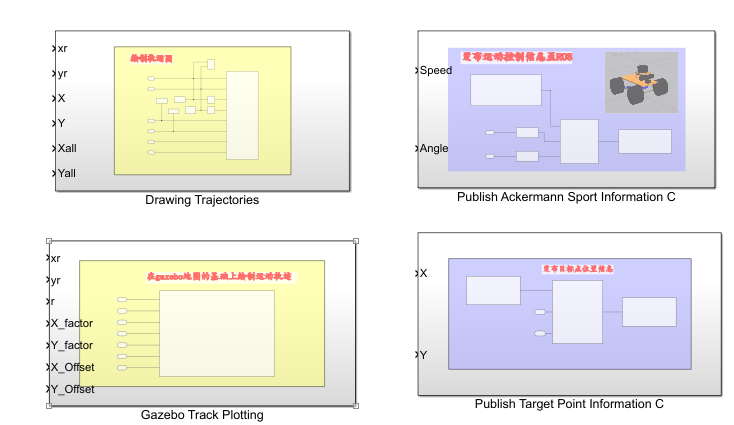
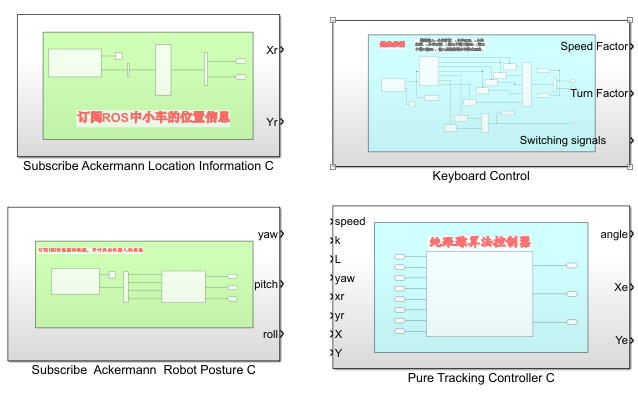
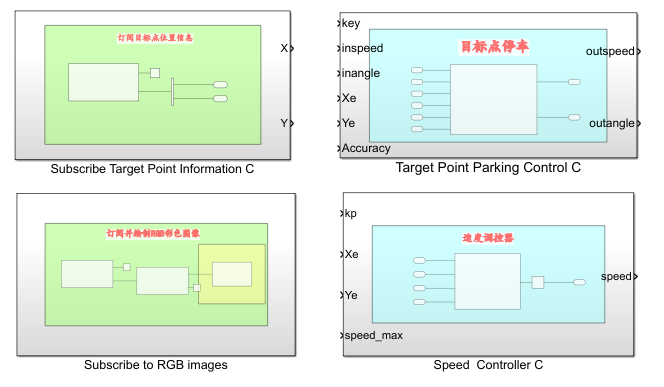
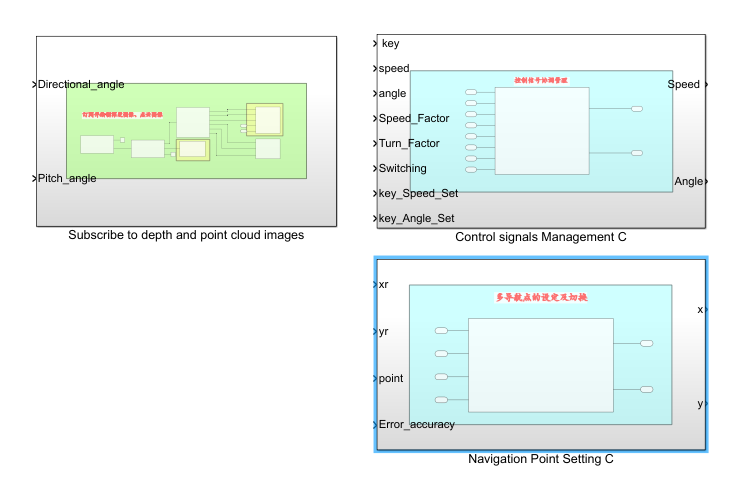
MATLAB与ROS联合仿真探索资料预览
历经一个月的设计和开发,也经过了多次测试和修改,最终我设计编写了以下Simulink模块,并将其模块化,具备很强的复用性和可移植性,推广使用也很方便
(白色背景的是给定类模块,淡黄色背景的是可视化绘图类模块,紫色背景的是发送消息至ROS类模块,绿色背景的是从ROS订阅消息类模块,淡蓝色背景的是控制类模块)
这些模块的详细介绍,使用方法及详细的搭建设计过程我都写成了详细的文档资料,因实验需要暂时不适合在网上公布
相关的博客链接如下(大部分内容目前未发布):
使用MATLAB绘制Gazebo中的仿真小车的运动轨迹【点击可跳转】
在Simunlink中使用Read image模块或Read Point Could模块读取ROS中图像时显示全黑的解决方法【点击可跳转】
这一阶段所完成的主要内容,如下面的视频所示:
MATLAB与ROS联合仿真探索总结
2021年11月25日,我开始了第五阶段的探索
成功将实验内容中,不涉及绘图及视频播放的部分由Simulink生成了ROS代码,并成功在ROS中独立运行
2021年12月份,我将开始第六阶段的探索
目前实验内容的初稿已经完成了,但是还没在其他电脑上验证过,这一阶段,需要找多台电脑,进行可行性测试,并解决在推广中可能出现的问题,以使其具备广泛的可推广性
至于第七阶段,对实物的探索将于2022年1月开始
车已拿到了,这绝对是我买过的最贵的小车了(7K),暂时实在无暇研究,只得暂时抑制兴奋之感
最后说一下探索开发的感受吧
一路走来,踩过一个个坑,解决了一个个Error
经历过痛苦和折磨,但确实收获良多
最惨的一次,被一个Error,折磨了三天三夜
可参考的资料真的真的少得可怜
大部分内容得靠自已钻研
所谓热爱和喜欢,也许就是
在困境面前,会毫不犹豫选择勇往直前
即使充满无力感,也不会萌生放弃的念头
道阻且长,行则将至
因为热爱,所以无所畏惧
同时也祝愿小伙伴们,所愿皆所得
学习/科研/工作
硕果累累,顺顺利利666
最后
以上就是真实摩托最近收集整理的关于为期两个月的MATLAB与ROS联合仿真探索总结——因为热爱,所以无所畏惧的全部内容,更多相关为期两个月内容请搜索靠谱客的其他文章。








发表评论 取消回复