目录
5.3 传递函数模型
5.3.1 概述
5.3.2 模型建立
5.3.3 MATLAB中
5.3 传递函数模型
5.3.1 概述
(1)概念
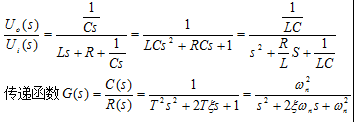
传递函数:当初始条件为零时,系统输出量(响应函数)的拉氏变换表达式与系统输入量(驱动函数)的拉氏变换表达式之比,称为该系统的传递函数,其一般表达式为:
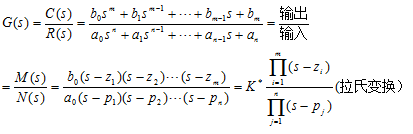
特征多项式:传递函数的分母![]() 为系统的特征多项式;极点:特征多项式等于0组成特征方程的根;阶数:特征多项式的最高阶数n;根轨迹增益:
为系统的特征多项式;极点:特征多项式等于0组成特征方程的根;阶数:特征多项式的最高阶数n;根轨迹增益:![]() ;
;
拉普拉斯变换:可采用传递函数代替常系数微分方程来描述系统的特性。这就为采用直观和简便的图解方法来确定控制系统的整个特性、分析控制系统的运动过程,以及提供控制系统调整的可能性。
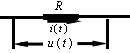
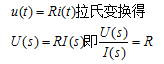
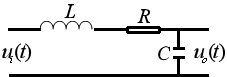
(2)算子阻抗法
参考:https://download.csdn.net/download/qq_38693598/10969179
https://wenku.baidu.com/view/f11c8023915f804d2b16c1ef.html?sxts=1550723655119
| 模型 | 算子阻抗 | |
|
输入为电流,输出位电压 |
| 电阻:R |
|
|
| 电容: |
|
|
| 电感:Ls |
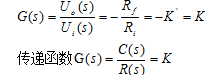
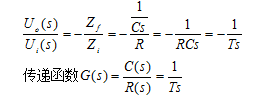
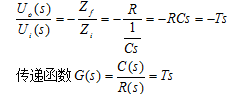
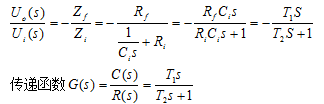
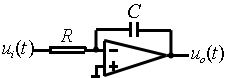
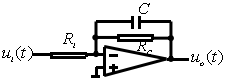
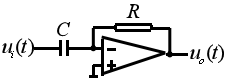
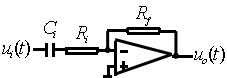
(3)典型电路环节
| 
|
|
|
|  |
| |
|  |
| |
| |
|  |
|  |
| |
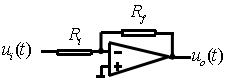
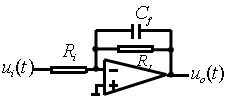
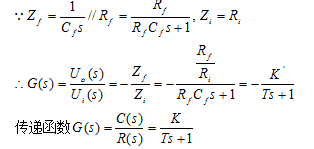
| K=Rf/Ri;T=Rf*Cf,积分/微分时间常数,也叫再调时间; ωn=1/T称为无阻尼自然振荡角频率;ζ-阻尼比,当0<ζ<1二阶振荡环节 具有一对实部为负的共轭复数极点,其单位阶跃响应曲线是衰减振荡;(时域分析会用到) | |
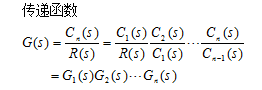
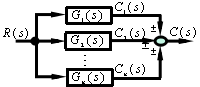
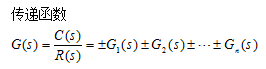
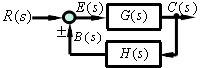
(4)串/并/反馈结构图
|
| |
|
|
|
|
| 闭环系统闭环传递函数
图中+对应正反馈,-对应负反馈,传递函数中正好相反 |
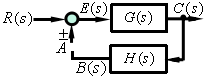
| 如把反馈通道在A点处断开 | 闭环系统开环传递函数:
此时,闭环系统闭环传递函数(单位反馈)为
| |
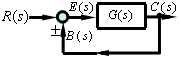
| 当H(s)=1时
| 单位反馈
| |
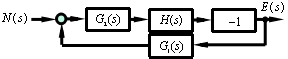
|
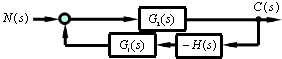
①求C(s)对R(s)的传递函数,令N(s)=0得 | |
| ②求C(s)对N(s)的传递函数,令R(s)=0得
| ||
| ③求C(s)对R(s)和N(s)的传递函数, 若G1(s)G2(s)H(s)>>1,负反馈能有效的抑制被反馈回路所包围的干扰 | ||
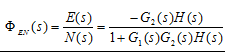
| ④求E(s)对R(s)的传递函数,即令N(s)=0,比较点内‘-’为串联‘-1’增益
| ||
| ⑤求E(s)对N(s)的传递函数,即令R(s)=0, | ||


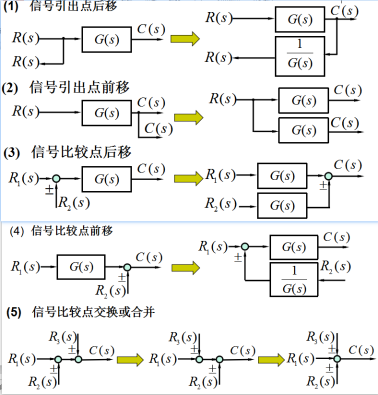
等效变换的方法:
信号引出点前移乘、后移除;信号比较点前移除、后移乘、互换合并不变
(5)零/极点分布图
将传递函数的零、极点表示在复平面上的图形称为传递函数的零、极点分布图。图中,零点用“O”表示,极点用“×”表示。

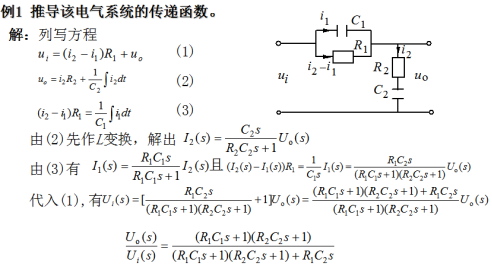
5.3.2 模型建立
(1)步骤
| 传递函数列写大致步骤: | |
|
|
(2)拉氏变换
| 原函数 | 象函数 |
| 单位脉冲函数δ(t) | 1 |
| 单位阶跃函数1(t) | |
| K常数函数 | |
| t 单位斜坡函数 | |
| | |
| | |
| sinωt | |
| cosωt | |
| 微分 | s*F(s) |
| 积分 |
|
| 衰减定律 | F(s+a) |
|
| |
5.3.3 MATLAB中模型建立
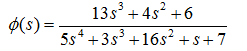
| 多项式传递函数 tf/tfdata |
num=[13 4 0 6];%多项式分子各项系数降次排列 den=[5 3 16 1 7];%多项式分母各项系数降次排列 sys=tf(num,den);%建立传递函数模型 或s=tf('s'); sys=10/(s*(0.5*s+1)*(0.1*s+1));%此处不能用sym代替tf, %[num,den]=tfdata(sys,’v’);%返回传递函数sys的分子分母多项式 | |
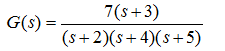
| 零极点式:zpk/zpkdata |
z=[-3];%输入零点%注意s系数为1%必须是列向量,无点则空向量 p=[-2 -4 -5];%输入极点 k=7;%输入增益 sys=zpk(z,p,k); %建立传递函数模型 %[z,p,k]=zpkdata(sys,’v’);%返回传递函数sys的零极点/增益多项式 | |
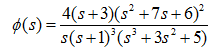
| 相关函数 | 因子式conv | 功能:实现2个多项式降次系数乘积运算
num=4*conv([1 3],conv([1 7 6]),conv([1 7 6]))); den=conv([1 0],conv([1 1],conv([1 1],conv([1 1],[1 3 0 5])))); sys=tf(num,den); |
| 部分分式展开函数residue ( ) | 功能:对两个多项式的比进行部分展开, [r, p, k]=residue(num, den); %求B(s)/A(s)的部分分式展开式,向量b和a是按s降幂排列的多项式系数,给出部分分式展开式的留数r、极点p和余数k: | |
| 模型转换 | 多项式/零极点式 zpk至tf:[num, den]=zp2tf(z, p, k);%注意前[]后() tf至zpk:[z, p, k]=tf2zp(num, den) | |
最后
以上就是清爽电灯胆最近收集整理的关于MATLAB/simulink控制系统之传递函数模型(0基础)的全部内容,更多相关MATLAB/simulink控制系统之传递函数模型(0基础)内容请搜索靠谱客的其他文章。








发表评论 取消回复