根据设计好的控制系统在Simulink中搭建对应模块进行求解,编译没问题,但在运行时出现报错信息如下:
Derivative of state '1' in block 'problem2/Subsystem/Integrator1' at time 4.4501477170144018E-309 is not finite. The simulation will be stopped. There may be a singularity in the solution. If not, try reducing the step size (either by reducing the fixed step size or by tightening the error tolerances)
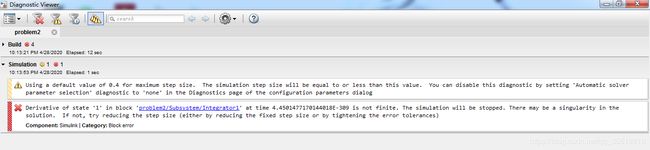
大致意思是说Interrator1积分器在很短的时间内就发散到无穷了,所以仿真被停止,系统可能存在奇异点。如果原系统在设计上并没有奇异点存在,那可以通过减小步长使得解收敛。
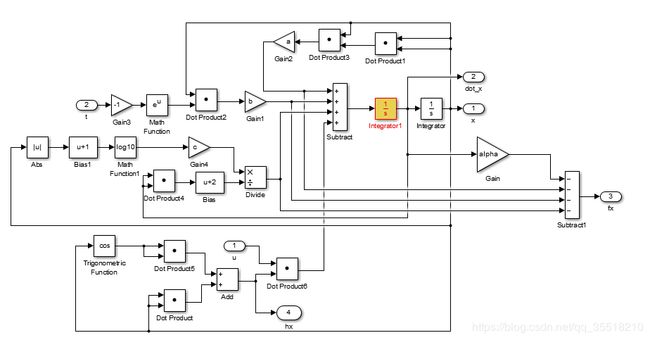
我可以比较肯定控制器的设计不存在奇异点,所以我选择将原来的可变步长求解器ode45改为定步长求解器ode3,并设置固定步长为0.001。如此一来,系统的解达到了收敛(控制目标是让状态变量x追踪给定信号xd),效果如下:
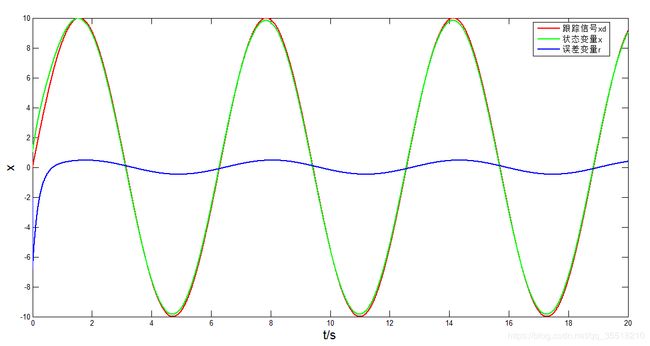
但这个效果并不理想,因为我的控制器在设计时是让误差r能够指数收敛于0的,上面的结果显示误差是有界的,但并没有收敛到0。我尝试将跟踪信号xd改变为一个常数,最终的误差能够达到收敛于0。
控制系统跟踪常数信号误差可以收敛于0,但跟踪正弦信号只能最终有界(通过调整误差反馈增益可以减小界限,但仍然存在,且成周期性)。所以我猜测是否利用Simulink搭建模块时产生了延迟导致,状态变量和跟踪信号总是存在误差。
于是我尝试使用编写S函数的方式实现仿真,下面是搭建的含有S函数的仿真系统,比直接用simulink模块少了不少(因为系统函数的表示通过代码写在了S-Function里面)
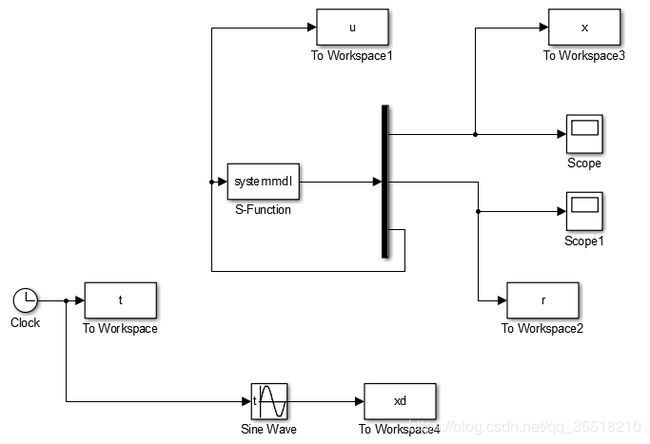
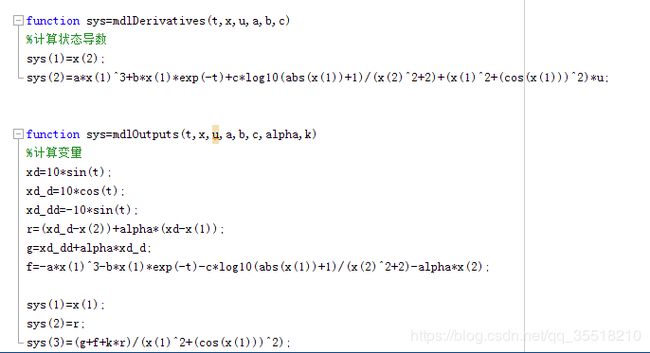
S函数中微分函数和输出函数主要内容:
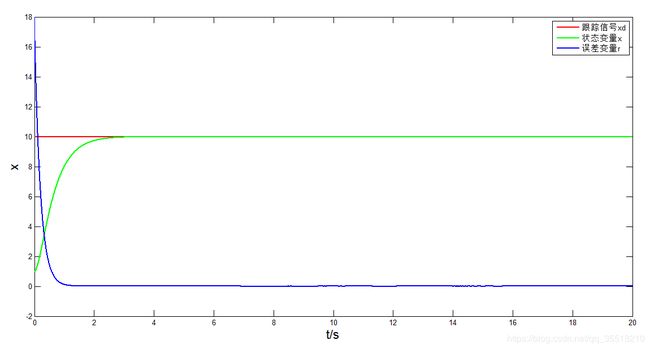
最后的仿真效果图:
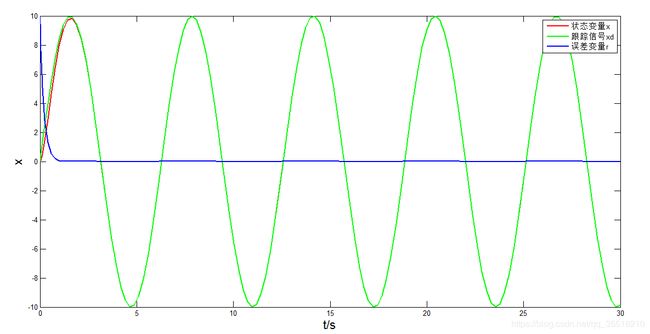
误差完美收敛到0。
总结来看,之所以前后两种控制系统仿真效果不一样,可能是因为利用simulink搭建较复杂的系统,通过太多模块连接会出现信号延迟的问题,毕竟整个信号传递通道中的输入输出连接都存在个先后的顺序问题,而S函数就很好的规避了这个问题。
最后
以上就是温婉小鸭子最近收集整理的关于matlab输入信号延迟simulink,Simulink仿真报错积分器不收敛存在奇异点的问题及Simulink仿真信号延迟问题...的全部内容,更多相关matlab输入信号延迟simulink,Simulink仿真报错积分器不收敛存在奇异点内容请搜索靠谱客的其他文章。








发表评论 取消回复