前言
提示:这里可以添加本文要记录的大概内容:
SPWM(Sinusoidal PWM)全称是正弦脉冲宽度调制,是一种 广泛应用于电机驱动,逆变电源等领域的调制技术。SPWM波是一种按正弦规律变化的一种PWM波形,是PWM的一种延伸,是一种可以等效成正弦波效果的PWM技术。
SPWM的基本原理就是面积等效原理,即冲量相等而形状不同的窄脉冲加在具有惯性的环节上时,其效果基本相同。 我们在生成SPWM的过程中通常使用的采样方式有:自然采样法和规则采样法。
提示:以下是本篇文章正文内容,下面案例可供参考
一、如何生成SPWM波数组
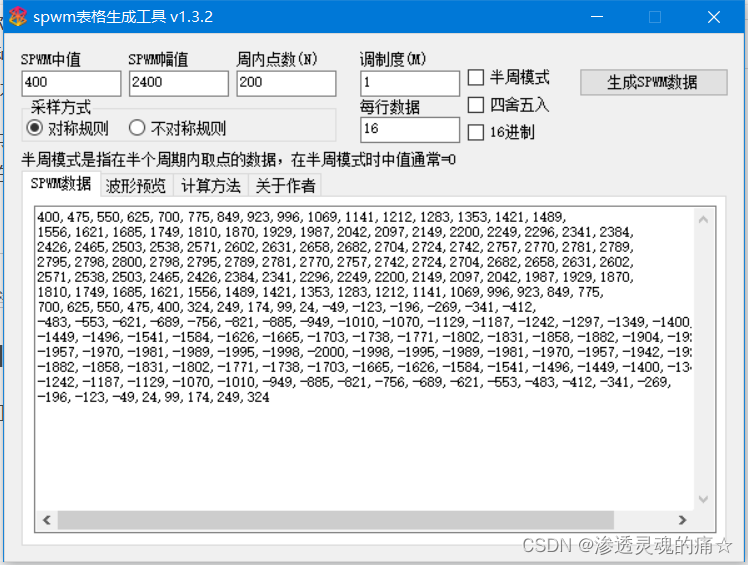
利用网友提供的SPWM波生成工具,可以生成任意的点数的波形。
或者使用excel生成也是一样的: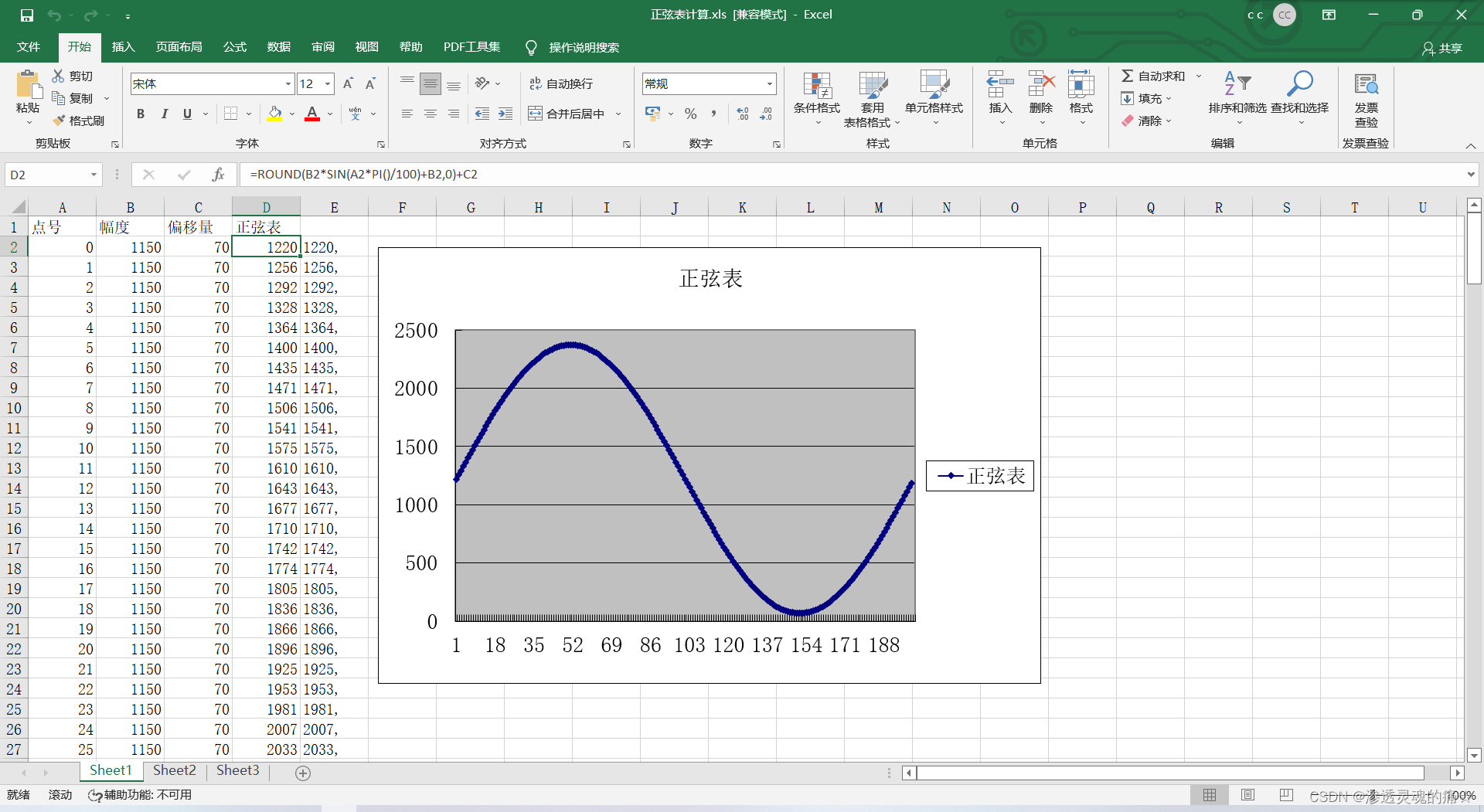
二、主要程序:
/******************************************
本程序输出频率固定, 如果需要变频, 请用户自己设计变频方案.
本程序从P6.0(PWM1P)输出正相脉冲, 从P6.1(PWM1N)输出反相脉冲(互补).
下载时, 选择时钟 24MHz (用户可自行修改频率).
******************************************/
#include <STC32G.H>
#include "stdio.h"
#include "intrins.h"
#include "T_SineTable.h"
typedef
unsigned char u8;
typedef
unsigned int u16;
typedef
unsigned long u32;
#define MAIN_Fosc
24000000UL
/****************************** 用户定义宏 ***********************************/
#define PWM1_1
0x00 //P:P1.0
N:P1.1
#define PWM1_2
0x01 //P:P2.0
N:P2.1
#define PWM1_3
0x02 //P:P6.0
N:P6.1
#define PWM2_1
0x00 //P:P1.2/P5.4
N:P1.3
#define PWM2_2
0x04 //P:P2.2
N:P2.3
#define PWM2_3
0x08 //P:P6.2
N:P6.3
#define PWM3_1
0x00 //P:P1.4
N:P1.5
#define PWM3_2
0x10 //P:P2.4
N:P2.5
#define PWM3_3
0x20 //P:P6.4
N:P6.5
#define PWM4_1
0x00 //P:P1.6
N:P1.7
#define PWM4_2
0x40 //P:P2.6
N:P2.7
#define PWM4_3
0x80 //P:P6.6
N:P6.7
#define PWM4_4
0xC0 //P:P3.4
N:P3.3
#define ENO1P
0x01
#define ENO1N
0x02
#define ENO2P
0x04
#define ENO2N
0x08
#define ENO3P
0x10
#define ENO3N
0x20
#define ENO4P
0x40
#define ENO4N
0x80
/*****************************************************************************/
/*************
本地常量声明
**************/
/*************
本地变量声明
**************/
u16 PWM1_Duty;
u8 PWM1_Index; //SPWM查表索引
u16 PWM2_Duty;
u8 PWM2_Index; //SPWM查表索引
u16 PWM3_Duty;
u8 PWM3_Index; //SPWM查表索引
/*************
本地函数声明
**************/
/********************* 主函数 *************************/
void main(void)
{
WTST = 0;
//设置程序指令延时参数,赋值为0可将CPU执行指令的速度设置为最快
EAXFR = 1; //扩展寄存器(XFR)访问使能
CKCON = 0; //提高访问XRAM速度
P0M1 = 0x00;
P0M0 = 0x00;
//设置为准双向口
P1M1 = 0x00;
P1M0 = 0x00;
//设置为准双向口
P2M1 = 0x00;
P2M0 = 0x00;
//设置为准双向口
P3M1 = 0x00;
P3M0 = 0x00;
//设置为准双向口
P4M1 = 0x00;
P4M0 = 0x00;
//设置为准双向口
P5M1 = 0x00;
P5M0 = 0x00;
//设置为准双向口
P6M1 = 0x00;
P6M0 = 0x00;
//设置为准双向口
P7M1 = 0x00;
P7M0 = 0x00;
//设置为准双向口
PWM1_Duty = 70;
PWM2_Duty = 1677;
PWM3_Duty = 1805;
PWMA_CCER1 = 0x00; //写 CCMRx 前必须先清零 CCxE 关闭通道
PWMA_CCER2 = 0x00;
PWMA_CCMR1 = 0x60; //通道模式配置
PWMA_CCMR2 = 0x60;
PWMA_CCMR3 = 0x60;
//
PWMA_CCMR4 = 0x60;
PWMA_CCER1 = 0x55; //配置通道输出使能和极性
PWMA_CCER2 = 0x05;
PWMA_ARRH = 0x09; //设置周期时间
PWMA_ARRL = 0x60;
// PWMA_PSCRH = 0x00;
// PWMA_PSCRH = 0x0B;
PWMA_CCR1H = (u8)(PWM1_Duty >> 8); //设置占空比时间
PWMA_CCR1L = (u8)(PWM1_Duty);
PWMA_CCR2H = (u8)(PWM2_Duty >> 8); //设置占空比时间
PWMA_CCR2L = (u8)(PWM2_Duty);
PWMA_CCR3H = (u8)(PWM3_Duty >> 8); //设置占空比时间
PWMA_CCR3L = (u8)(PWM3_Duty);
PWMA_DTR = 0x0C;
//设置死区时间
PWMA_ENO = 0x00;
PWMA_ENO |= ENO1P; //使能输出
PWMA_ENO |= ENO1N; //使能输出
PWMA_ENO |= ENO2P; //使能输出
PWMA_ENO |= ENO2N; //使能输出
PWMA_ENO |= ENO3P; //使能输出
PWMA_ENO |= ENO3N; //使能输出
//
PWMA_ENO |= ENO4P; //使能输出
//
PWMA_ENO |= ENO4N; //使能输出
PWMA_PS = 0x00;
//高级 PWM 通道输出脚选择位
PWMA_PS |= PWM1_3; //选择 PWM1_3 通道
PWMA_PS |= PWM2_3; //选择 PWM2_3 通道
PWMA_PS |= PWM3_3; //选择 PWM3_3 通道
//
PWMA_PS |= PWM4_3; //选择 PWM4_3 通道
PWMA_BKR = 0x80; //使能主输出
PWMA_IER = 0x01; //使能中断
PWMA_CR1 |= 0x01; //开始计时
EA = 1;
//打开总中断
while(1)
{
}
}
/******************** 中断函数 **************************/
void PWMA_ISR() interrupt PWMA_VECTOR
{
if(PWMA_SR1 & 0X01)
{
PWMA_SR1 &=~0X01;
PWM1_Duty = A_SinTable[PWM1_Index];
if(++PWM1_Index >= 200) PWM1_Index = 0;
//
PWM1_Index++;
PWMA_CCR1H = (u8)(PWM1_Duty >> 8); //设置占空比时间
PWMA_CCR1L = (u8)(PWM1_Duty);
PWM2_Duty = B_SinTable[PWM2_Index];
if(++PWM2_Index >= 200) PWM2_Index = 0;
//
PWM2_Index++;
PWMA_CCR2H = (u8)(PWM2_Duty >> 8); //设置占空比时间
PWMA_CCR2L = (u8)(PWM2_Duty);
PWM3_Duty = C_SinTable[PWM3_Index];
if(++PWM3_Index >= 200) PWM3_Index = 0;
//
PWM3_Index++;
PWMA_CCR3H = (u8)(PWM3_Duty >> 8); //设置占空比时间
PWMA_CCR3L = (u8)(PWM3_Duty);
}
PWMA_SR1 = 0;
}
最后
以上就是笨笨白羊最近收集整理的关于如何用STC32产生SPWM波一、如何生成SPWM波数组二、主要程序:的全部内容,更多相关如何用STC32产生SPWM波一、如何生成SPWM波数组二、主要程序内容请搜索靠谱客的其他文章。
本图文内容来源于网友提供,作为学习参考使用,或来自网络收集整理,版权属于原作者所有。








发表评论 取消回复