论文地址:https://arxiv.org/pdf/1611.09224.pdf
代码地址:https://github.com/martin-danelljan/ECO
ECO:(Efficient Convolution Operators for Tracking)是CVPR2017的一篇基于相关滤波的文章,本文主要对其matlab版本配置运行进行介绍,并简要分析其跟踪原理,分享自己的一些心得。
一、matlab代码运行
1、matconvnet下载
下载地址: https://github.com/vlfeat/matconvnet
下载后放置到external_libs/matconvnet/目录下
2、PDollar Toolbox下载
下载地址:https://github.com/pdollar/toolbox
下载后放置在external_libs/pdollar_toolbox/目录下
3、预训练模型imagenet-vgg-m-2048.mat下载
下载地址:https://www.vlfeat.org/matconvnet/pretrained/
如果点击出现乱码,无法下载,建议换个浏览器下载
在feature_extraction/目录下新建文件夹networks,并将下载的网络放置底下
4、运行install.m
如果是第一次在matlab运行matconvnet可能会比较麻烦点,CPU版本运行详解步骤可以参考我的上一篇博客CCOT代码运行,如果是GPU版本运行可以参考我的另一篇博客SiameseFC的运行两者是一样的流程。如果不想装visual studio,也可以参考这篇博客
运行成功显示如下
5、跟踪
作者给了好几个版本,都可以查看效果
- demo_ECO----CPU版本
- demo_ECO_gpu----GPU版本
- demo_ECO_HC----不使用CNN特征,只使用HOG+CN
三者跟踪速度差距较大,在我的matlab上跟踪速度如下:
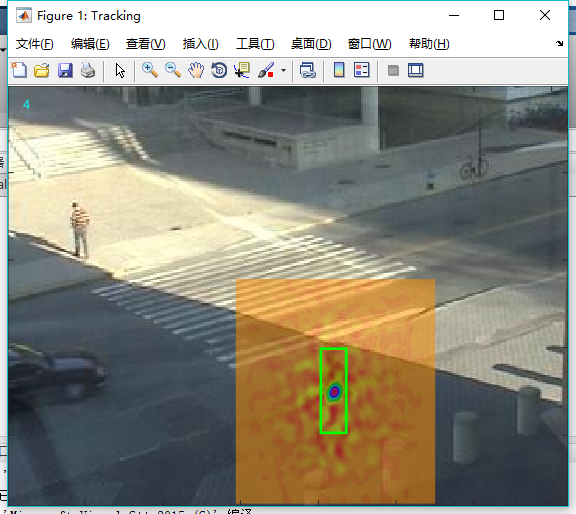
跟踪效果如下
二、ECO算法简介
ECO是在CCOT的基础上进行改进的,两者也是出自同一作者,ECO主要是作者为解决CCOT过拟合、速度慢等问题进行的改进。
2.1背景
基于相关滤波的目标跟踪可以说是这几年的一个重要分支。为提高其跟踪的精度和鲁棒性,人们普遍采用1、多维度特征;2、目标尺寸预测;3、非线性核;4、对前几帧模型的存储;5、复杂的学习模型和6、减少边缘效应等手段,但这些方法都是以牺牲跟踪速度为前提的。
这些手段虽然提高了精度和跟踪鲁棒,但也带来了过拟合的风险。
为什么会过拟合?
目标跟踪通过第一帧来训练模型,训练数据相当有限,可是为了提高跟踪性能,滤波器模板越来越复杂(尤其是深度特征,数据量相当庞大),想利用有限的训练数据形成庞大复杂的训练模型,过分的训练少量的数据,导致复杂模型存在过拟合(以CCOT算法为例,每次更新模型需要改变800,000个参数)
总结起来,影响相关滤波速度的主要有
1、滤波器模型越来越大,不仅给计算带来负担,而且容易引起过拟合。
2、训练集越来越大,训练集主要用于保存之前每一帧的跟踪结果,所以每一次更新滤波器模型时,都要用到之前的样本,那么随着跟踪的进行,训练集保存的样本将越来越多,这明显不实际。一般都是丢弃老的样本,保存新的样本,但这种取舍导致模型更新过于依赖最近几帧目标的外观形状,但出现遮挡等现象,可能会污染模型,导致失败
3、模型更新策略,每帧更新模型不仅耗时,而且容易过拟合
2.2本文的三个贡献
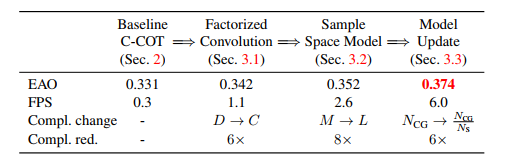
本文主要是提出三个核心点,并解决了三个问题
1、Factorized Convolution Operator–特征的删减
先简要分析一下CCOT,CCOT的核心贡献在于将离散的feature map插值到连续域,解决了不同feature map的尺寸问题。
对离散feature map输入进行插值

b
d
{b_{d}}
bd实际是一个sinc函数
x
d
[
n
]
x^{d}[n]
xd[n]第d维特征对应的离散输入
N
d
N^{d}
Nd离散输入的数量,或者可以理解为feature map的分辨率
J
d
J^{d}
Jd插值结果,第d维对应的连续的feature map
滤波器模型预测结果:

损失函数(共有M个训练样本)

变换到频域

对滤波器f求导,解的

A
A
A:块对角矩阵,实际就是训练样本组成的矩阵,每个对角块代表一个样本
Γ
Gamma
Γ:包含每个训练样本权重
α
j
alpha _{j}
αj的矩阵
通过Conjugate Gradient(共轭梯度)迭代计算出使损失函数最小的
f
^
hat{f}
f^
CCOT在特征提取方面相当全面CNN+CN+HOG的组合使得其性能相当出色,但作者很快发现CCOT存在大量的过拟合,如下图
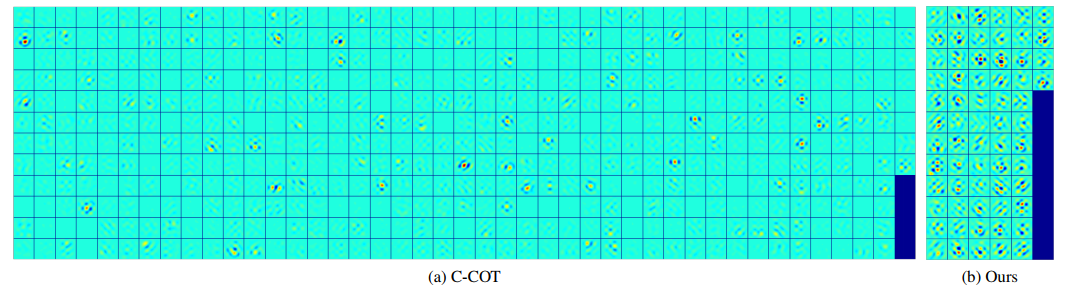
因此,ECO中,作者第一个贡献就是对CCOT特征提取的简化,对于CCOT,每一维特征都对应一个特定的滤波器,但通过观察可以发现,CCOT用到的滤波器很稀疏,如下图所示,绝大部分滤波器对跟踪定位没有帮助却占用计算时间,所以Factorized Convolution Operator就是为了保留对定位有重要贡献的滤波器。
具体步骤:
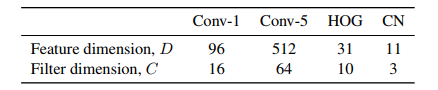
主要是引入一个常数矩阵P(尺寸为D×C),该矩阵的作用在于将高维特征进行删减,原来共有D维特征,加入P后只剩下C维(P对滤波器数量的删减可以理解为对提取特征维度的删减,因为一个滤波器对应一个特征)。
预测结果:

损失函数在频域中表现为:

这是一个非线性最小二乘问题,相比于CCOT,作者不仅用了Conjugate Gradient(共轭梯度),还引入高斯牛顿来对矩阵P,滤波器
f
^
hat{f}
f^进行展开
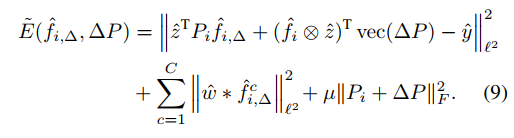
其中

其中高斯牛顿迭代了10次,共轭梯度迭代了20次,具体原理不明白可以不深究。
第一个贡献的效果:明显降低了滤波器的维度数量
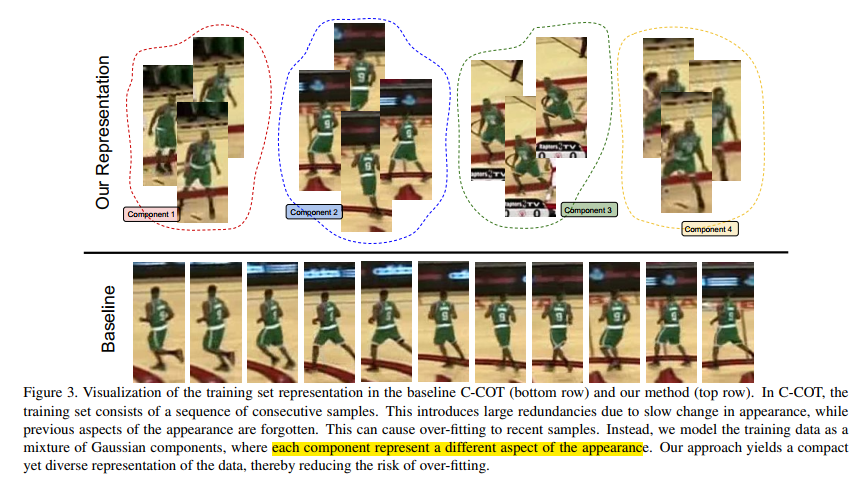
2、Generative Sample Space Model----保持样本的多样性并减少其数量
这一贡献主要是针对训练集进行改进,正如上文所提,训练集数量庞大,而且简单的舍弃老样本(如下图的第二行Baseline所示)导致滤波器模型过于依赖最近几帧的目标外观模型,且存在大量冗余。
为此作者通过样本x和预期目标输出y的联合概率分布p(x,y),将目标函数完善为

原始的损失函数(公式3)只不过是
p
(
x
,
y
)
=
∑
j
=
1
M
α
j
δ
x
j
,
y
j
(
x
,
y
)
p(x,y)=sum_{j=1}^{M} alpha _{j} delta _{x_{j},y_{j}}(x,y)
p(x,y)=∑j=1Mαjδxj,yj(x,y)的一个特例,另外预期目标输出y其实形状一致,只不过峰值位置发生平移,所以作者将y设置成一样,而峰值位置的平移放入x中进行考虑。所以只需要考虑p(x),此处引入高斯混合建模(GMM)
高斯混合模型,英文全称:Gaussian mixture model,简称GMM。高斯混合模型就是用高斯概率密度函数(二维时也称为:正态分布曲线)精确的量化事物,将一个事物分解为若干基于高斯概率密度函数行程的模型
高斯混合模型也被视为一种聚类方法,是机器学习中对“无标签数据”进行训练得到的分类结果。其分类结果由概率表示,概率大者,则认为属于这一类。
对GMM模型的理解
类似于傅里叶变换,自然界任何复杂曲线都可以用无数个不同形状sin和cos曲线组成,高斯函数也是如此(如下图,摘自博客),只要数量够多,高斯函数可以表征任意复杂的曲线,换成高维空间也是一个道理。
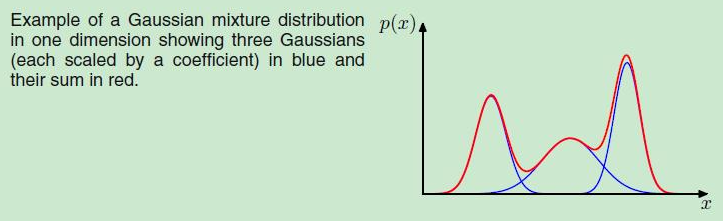
总结一句话,通过多个不同形状的高斯函数(component对应上图中蓝色的单一高斯曲线),可以拟合任意曲线(GMM模型对应上图中红色的高斯叠加曲线)。
训练集采集样本步骤:
- 每来一帧新图片,使用 π m = γ pi_{m}=gamma πm=γ和 μ m = x j mu_{m}=x_{j} μm=xj(训练样本输入)来初始化一个新component m
- 如果此时component的数量超过L(事先设定的值),开始简化GMM模型,反之,直接进行保存
- 简化GMM,比较GMM各个components的
μ
m
mu_{m}
μm,根据两者之间的距离
∣
∣
μ
k
−
μ
l
||mu_{k}-mu_{l}
∣∣μk−μl,找出距离最近的两个components,并将其合为一个component,该component的
μ
mu
μ和
π
pi
π由下可计算得

- 持续更新,直到M个训练样本都结束完
损失函数为

相比原来的损失函数,滤波器由M减为L(文中L=M/8)
3、Model Update Strategy----每6帧更新一次模型
模型更新没什么难理解,每隔
N
s
=
6
N_{s}=6
Ns=6更新一次。
但这里有的需要注意得,那就是训练集样本component仍然是每帧更新的,但是GMM模型是每
N
s
N_{s}
Ns更新一次
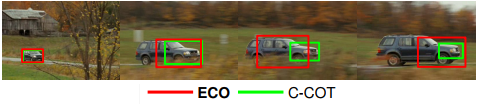
2.3跟踪效果
相比于CCOT,其精度更佳,速度更快,三个贡献都相当有效
参考博客
深度理解高斯混合模型(GMM)
目标跟踪算法二:ECO: Efficient Convolution Operators for Tracking(2016年11月)
最后
以上就是大力毛豆最近收集整理的关于目标跟踪之ECO代码运行及原理简介的全部内容,更多相关目标跟踪之ECO代码运行及原理简介内容请搜索靠谱客的其他文章。








发表评论 取消回复