参考几篇文章:
C语言实现卡尔曼滤波(转)
卡尔曼滤波的简单实现(Matlab & OC)
卡尔曼滤波简单理解及C语言代码
步骤:
- X(k|k-1)=X(k-1|k-1);
X(k-1|k-1)表示上个时刻的值,X(k|k-1)表示当前时刻的猜测值,猜测当前值和上一时刻的值相同; - P(k|k-1)=P(k-1|k-1)+Q;
P(k|k-1)表示当前预测的协方差,P(k-1|k-1)表示上一时刻的协方差,Q表示过程噪声的协方差,运算时并没有用到过程噪声,而是使用其协方差进行运算; - K(k)=P(k|k-1)/(P(k|k-1)+R);
R表示测量噪声的协方差,K(k)是用两个协方差得到的权值,称为卡尔曼增益; - X(k|k)=X(k|k-1)+K(k) * (Z(k)-X(k|k-1));
Z(k)表示当前时刻的测量值,X(k|k)为当前修正的值,等于 当前预测值 + 卡尔曼增益 * (当前测量值 - 上一次滤波后的值) - P(k|k)=(1-K(k))*P(k|k-1);
最后更新修正值的协方差;
Q:过程噪声,Q增大,动态响应变快,收敛稳定性变坏
R:测量噪声,R增大,动态响应变慢,收敛稳定性变好
调参主要是调QR, P可以随便设;
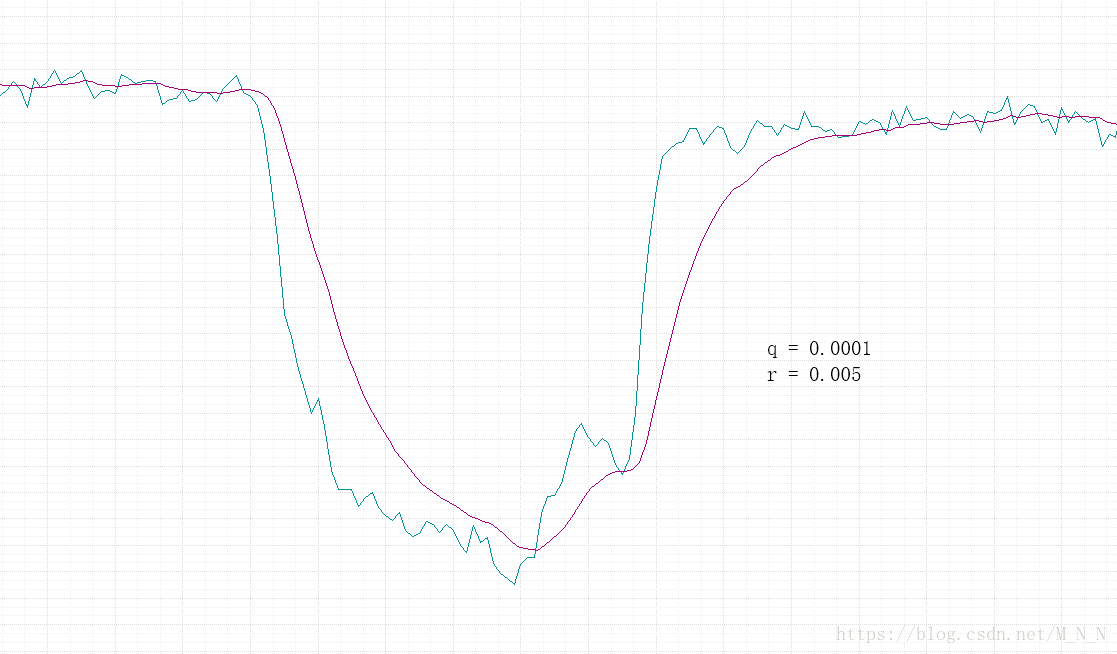
示例波形
Q = 0.0001 R = 0.005
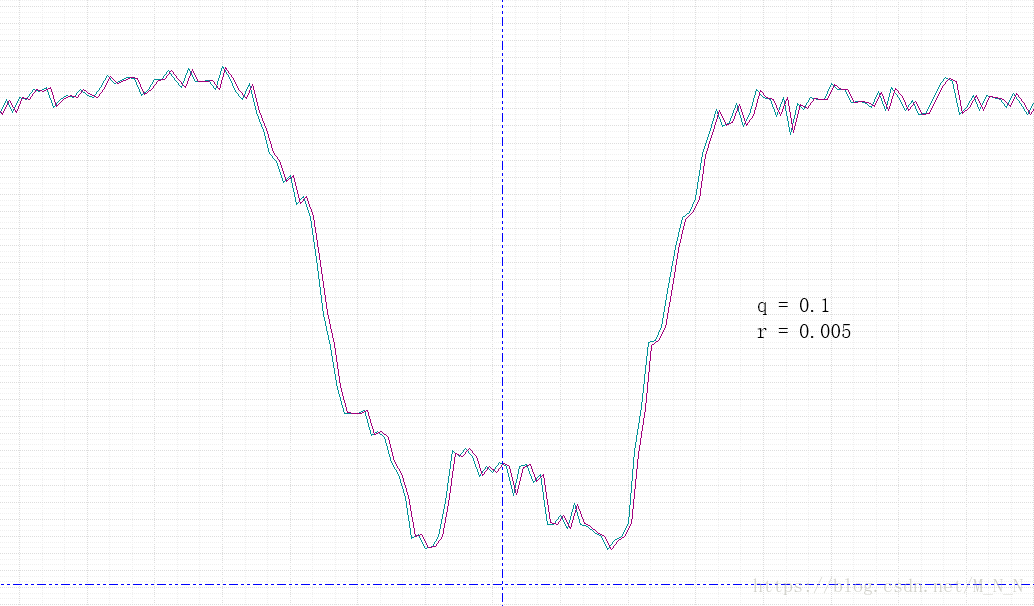
Q = 0.1 R = 0.005 (Q增大响应变快)
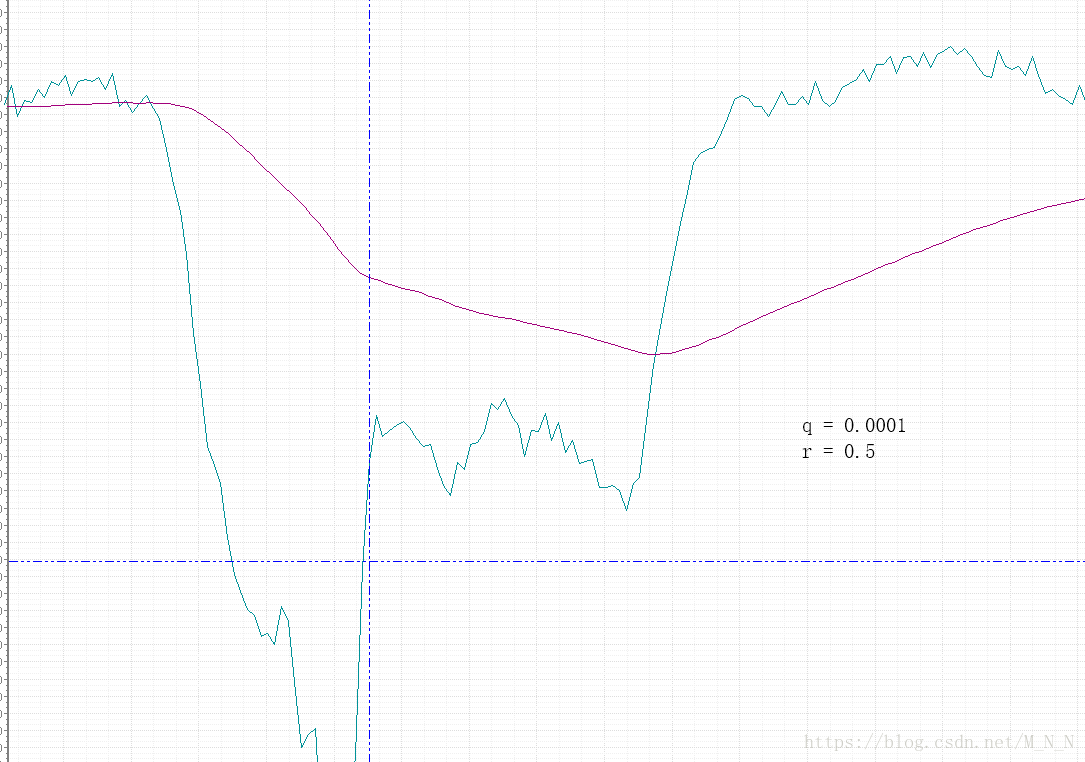
Q = 0.0001 R = 0.5 (R增大收敛稳定性变好)
static float prevData=0;
static float p=1000, q=0.0001, r=0.005, kGain=0;
float kalmanFilter_A(u32 inData)
{
p = p+q;
kGain = p/(p+r);
inData = prevData+(kGain*(inData-prevData));
p = (1-kGain)*p;
prevData = inData;
return inData;
}最后
以上就是鲜艳柚子最近收集整理的关于卡尔曼滤波测试参考几篇文章:步骤:的全部内容,更多相关卡尔曼滤波测试参考几篇文章内容请搜索靠谱客的其他文章。
本图文内容来源于网友提供,作为学习参考使用,或来自网络收集整理,版权属于原作者所有。








发表评论 取消回复