1.连续线性系统的数学模型与MATLAB表示
1.1传递函数模型

方法一:
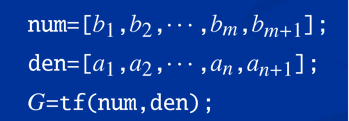
方法二:tf('s')算子
示例:
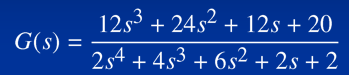
%方法一:
B=[0 12 24 12 20];A=[2 4 6 2 2];%降幂排列,注意系数对齐
G=tf(B,A)
%方法二:
s=tf('s')
G=(12*s^3+24*s^4+12*s+20)/(2*s^4+4*s^3+6*s^2+2*s+2)1.2状态方程模型

线性状态方程:
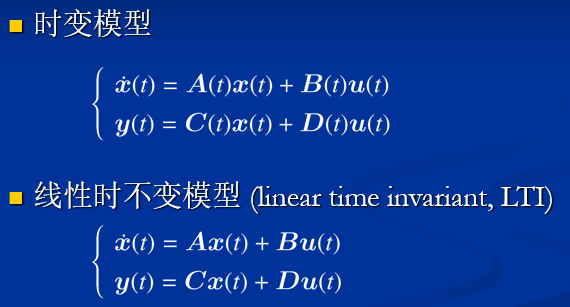
线性时不变模型的matlab描述:
G=ss(A,B,C,D)
示例:
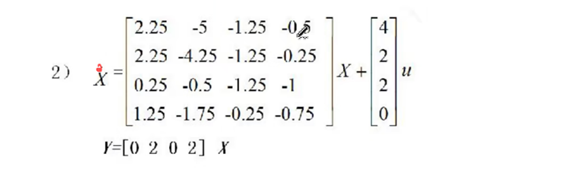
A=[2.25 -5 -1.25 -0.5;2.25 -4.25 -1.25 -0.25;0.25 -0.5 -1.25 -1;1.25 -1.75 -0.25 -0.75]
B=[4;2;2;0]
C=[0 2 0 2]
D=[]
G=ss(A,B,C,D)%D其实可以省略1.3零极点模型

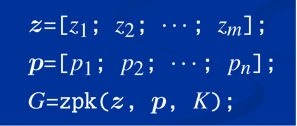
matlab表示:G=zpk(z,p,k),pzmap(G)可以绘制零极点分布图
2.线性离散系统的数学模型
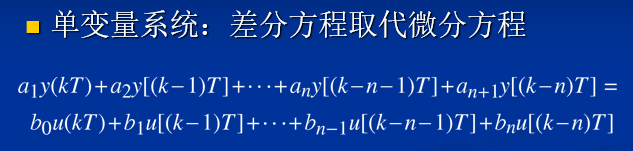
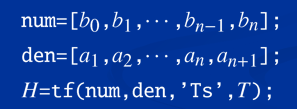
2.1离散传递函数模型

方法一:
方法二:z=tf('z',T)算子输入法
2.2离散状态方程
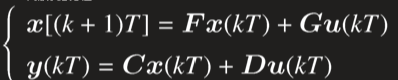
H=ss(F,G,C,D,'Ts','T')
离散延迟系统的状态方程

H=ss(F,G,C,D,'Ts','T','ioDelay',m)
3.方框图
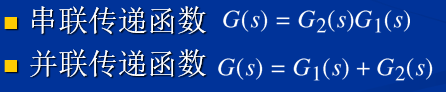
3.1串并联
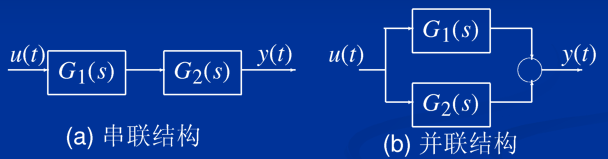
%matlab计算
G=G2*G1 %串联
G=G1+G2 %并联3.2反馈
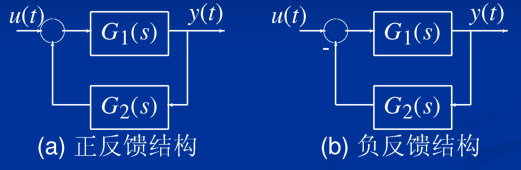
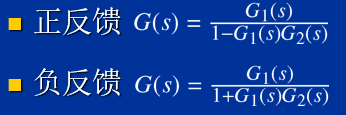
G=feedback(G1,G2) %负反馈
G=feedback(G1,G2,1) %正反馈4.系统模型的相互转换
4.1连续模型和离散模型的相互转换
G1=c2d(G,T) %连续转换为离散
G2=d2c(G) %离散模型连续化4.2一般传递函数与零极点模型转换
G=tf([1 3 6],[3 2 5])
Gzpk=zpk(G) %zpk()函数可以将其他模型转换为零极点模型,同理ss()函数也可以
G1=tf(Gzpk) %tf()函数可以将其他模型转换为一般的传递函数模型最后
以上就是单纯雪糕最近收集整理的关于matlab描述线性系统传递函数的全部内容,更多相关matlab描述线性系统传递函数内容请搜索靠谱客的其他文章。
本图文内容来源于网友提供,作为学习参考使用,或来自网络收集整理,版权属于原作者所有。








发表评论 取消回复