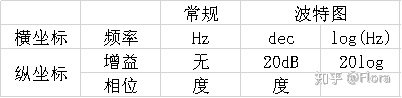
开环特性分析闭环系统的稳定性时会用到波特图,波特图很直观,比如分析运放的开环特性。根据系统传递函数求得的电压增益和相位随着频率变化曲线,其横纵坐标参数及其单位见表1.1所示。
在波特图中,每碰到一个极点,增益曲线以斜率-20dB/dec下降。而相位曲线在极点附近的斜率是-45度/dec,从0.1倍极点处开始下降,至极点处下降45度,至10倍极点处下降90度,然后相位保持不变至下一个极点。每碰到一个极点,增益曲线的斜率在累加,而相位曲线的斜率始终是-45度/dec。
相位裕度(phase margin, PM),增益曲线下降为1(或0dB)时,相位的变化值(相对于直流增益的相位)与180度的距离。
增益裕度(gain margin, GM),相对于直流增益的相位,相位的变化值为180度时,增益与0dB的距离。
单位增益带宽(unity gain bandwidth),增益曲线下降为1(或0dB)时所对应的频率。一般来说,开环系统带宽是指-3dB带宽,而闭环系统带宽是指单位增益带宽。
增益带宽积(gain-bandwidth product, GBW or GBP),增益(比值,无量纲)与带宽(单位为Hz)的乘积。
单位增益带宽与增益带宽积的关系?
如果是单极点的系统,单位增益带宽和增益带宽积相等。如果是多极点系统,单位增益带宽小于增益带宽积。推导过程如下。假设在(f1,a1)和(f2,a2)处增益带宽积相同,则有
-----------------------------------------------------------------------------------公式1.1
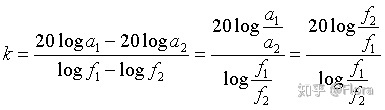
-----------------------------------------------------------------------------------公式1.2
当且仅有在公式1.2中,增益曲线的斜率为k=-20dB/dec时,才能满足公式1.1。
如果相位裕度为45度,单位增益带宽正好位于第二个极点P2,如图1.1所示。该增益曲线在第二极点(单位增益带宽)之前可以看成是单极点系统。因此有,

如果相位裕度要大于45度,单位增益带宽/GBW要低于第二个极点P2。
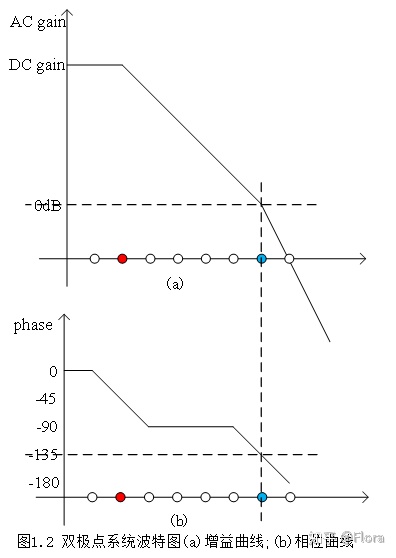
双极点系统,提高相位裕度的方法有二:其一,拉大第二极点P2与主极点P1的距离,二者距离越远相位裕度越好,降低主极点P1的位置,或者提高第二极点P2的位置;其二,降低DC gain,DC gain越低,在第一个极点P1之后,增益就越早降至0dB,相位裕度越好。
极点多见左半平面极点。
零点有左半平面零点和右半平面零点。每碰到一个左半平面零点,增益曲线以斜率+20dB/dec增加,相位曲线在左半平面零点附近的斜率是+45度/dec,从0.1倍零点处开始上升,零点处上升了45度,10倍零点处上升了90度。每碰到一个右半平面零点,增益曲线以斜率+20dB/dec增加,相位曲线在右半平面零点附近是-45度/dec,从0.1倍零点处开始下降,零点处下降了45度,10倍零点处下降了90度。
在原本只有双极点的系统里,增加零点会怎样?相位裕度/增益裕度/单位增益带宽
如果增加右半平面零点,增益增加,相位下降,恶化了相位裕度和增益裕度。因此应该尽量避免右半平面零点。同时单位增益带宽增加。
如果增加左半平面零点。如果左半平面零点与次极点P2位置相同,相互抵消,系统相当于单极点系统,提高相位裕度。同时单位增益带宽增加。如果左半平面零点的位置低于次极点P2,碰到零点时,增益曲线不再下降,斜率变为0,而相位曲线已增加45度,能起到补偿作用,提高相位裕度,其实可以理解是在补偿主极点。如果左半平面零点的位置略高于次极点P2的位置,但是低于单位增益带宽,还是能起到一定的补偿作用。因此,只要是左半平面零点的位置低于单位增益带宽,就能起到提高相位裕度的目的。
电压增益为什么用20log处理?采用对数的目的是在波特图上能完整直观地显示。系数乘以20的目的是为了与功率对应起来。

最后
以上就是开放龙猫最近收集整理的关于闭环系统的零极点图判定稳定性_波特图的全部内容,更多相关闭环系统内容请搜索靠谱客的其他文章。








发表评论 取消回复