文章目录
- 1 简介
- 2 绪论
- 2.1 课题背景
- 2.2 实现功能
- 3 系统设计
- 3.1 系统架构
- 3.2 硬件设计
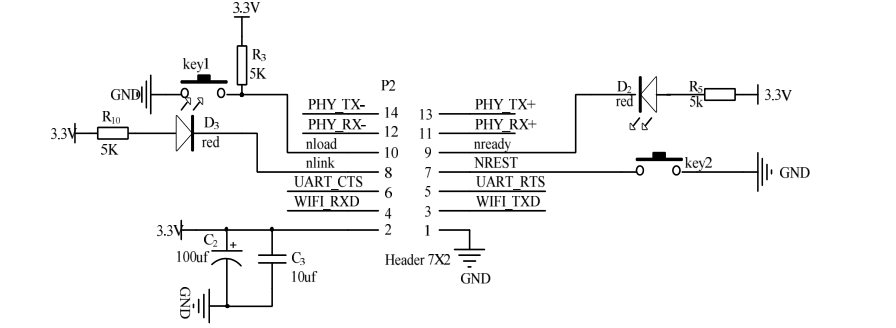
- 3.2.1 wifi电路设计
- 3.2.2 其他电路设计
- 3.3 软件设计
- 3.3.1 软件工作流程
- 3.3.2 闹铃提醒程序设计
- 3.3.3 液晶显示程序设计
- 3.3.4 信息存储程序设计
- 3.3.5 报警电路程序设计
- 3.4 部分实现代码
- 4 最后
1 简介
Hi,大家好,今天向大家介绍一个学长做的单片机项目
基于STM32的智能药箱系统设计与实现
大家可用于 课程设计 或 毕业设计
2 绪论
2.1 课题背景
照顾老人, 特别是提醒老人准时吃药已经成为了一个社会关心的问题。长期记录吃药种类、 吃药时间能为分析老人的病理提供有力的依据。
基于目 前市场需求, 学长设计了一款基于 STM32F103 并结合网络来提醒老人按时吃药的系统。
整个智能药箱系统分为智能药箱端与远程服务器端两个部分, 智能药箱端用于提醒, 服务器端用于记录监督
2.2 实现功能
整个系统经过多次测试和应用, 各功能模块都可以正常运行, 符合设计要求。 具有的功
能包括: 从服务器端的数据库中实时获取药物信息, 闹钟信息等并存储。 播放音频文件提醒老人用药, 在液晶屏上提示吃药信息, 老人可以根据显示信息正确用药。 智能药箱端能记录药箱中每种药的数目, 并进行药量检测, 在药量不足时发出提醒, 提示用户配药。 另外还可以对老人取药动作进行记录, 将取药状态通过互联网传输给服务器监控端, 为以后看病做依据。 另外, 智能药箱端通过程序界面方便的配置智能药箱内部的网络信息,包括服务器地址、端口、 网关等。
它的主要功能分为下面几个部分:
-
- 提醒功能
-
- 取药监督
-
- 记录吃药时间
-
- 对老人是否吃药及时做出反应
-
- 显示吃药信息
服务器中记录下的取药时间可以作为以后看病的有力依据, 使医生能够准确对老人的病情做出判断, 减少一定的医学失误。
尽管智能药箱的发展并没有早期预期的那么快。 但是, 它的应用价值极高, 针对性也很
强, 可以有效的管理老年人用药, 减少儿女对父母吃药问题上的担心。 所以, 随着科技的发展, 智能药箱的普及将指日可待。
3 系统设计
3.1 系统架构
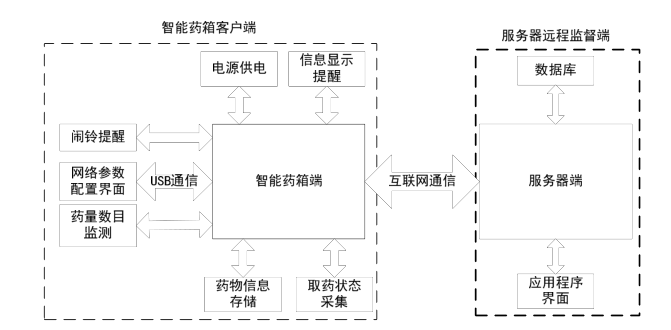
设计上必须从上图架构出发, 从上图可以得出智能药箱系统的总体功能:
- a) 闹钟提醒吃药
- b) 液晶显示吃药信息
- c) 实时采集取药状态
- d) 存储从服务器端获取的信息
- e) 配置界面配置药箱端的网络参数
- f) 实时检测药数量, 不足提醒用户
- g) 增加服务器端, 记录药物信息, 闹钟, 取状态药等信息
3.2 硬件设计
3.2.1 wifi电路设计
3.2.2 其他电路设计
略,内容相对冗余,也不是本文介绍的重点,需要详细设计方案,可以在文章末尾联系学长。
3.3 软件设计
3.3.1 软件工作流程
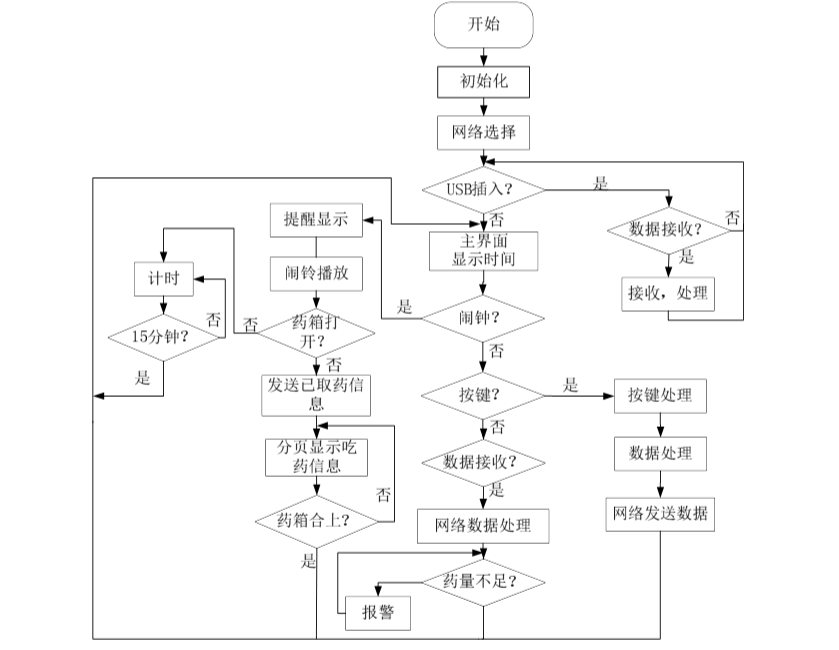
程序包括模块的驱动与功能操作, 驱动主要是硬件的驱动, 每个模块只有在硬件驱动成功后, 才能执行其余功能。
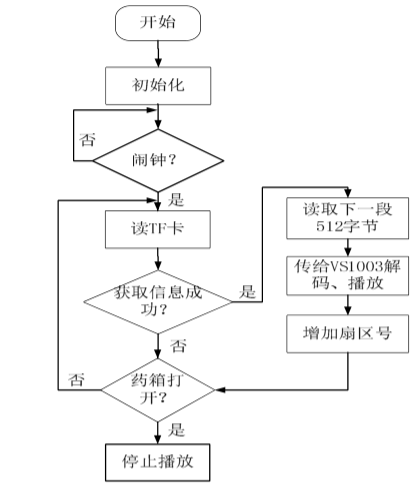
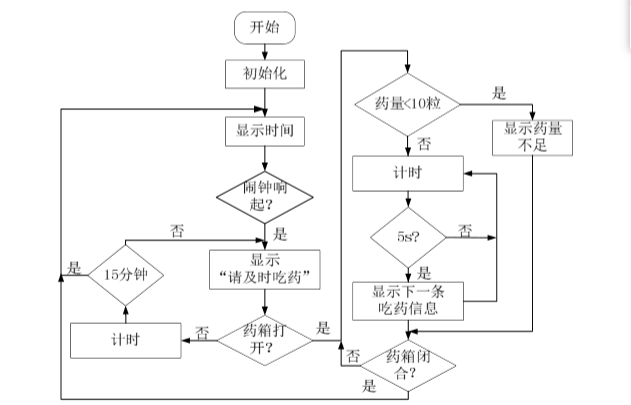
3.3.2 闹铃提醒程序设计
下图是闹铃提醒的程序流程图, STM32 从 TF 卡中读取 512 字节数据, 按顺序传输给VS1003 进行音频转换和播放。 然后, 依次读取下一个扇区的 512 个字节进行播放。 如果播放过程中检测到药箱打开, 则停止闹铃并退出。
3.3.3 液晶显示程序设计
下图是闹铃提醒的程序流程图, STM32 从 TF 卡中读取 512 字节数据, 按顺序传输给VS1003 进行音频转换和播放。 然后, 依次读取下一个扇区的 512 个字节进行播放。 如果播放过程中检测到药箱打开, 则停止闹铃并退出。
3.3.4 信息存储程序设计
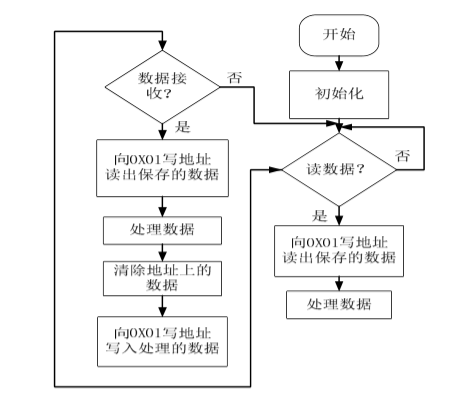
存储信息的过程如下:
当智能药箱接收网络参数, 药物信息时, 首先对数据按协议正确处理, 然后向 24C08 发送存储地址, 如果地址上已经有数据, 则读取。 然后将地址上的数据清空, 将刚才接收并处理的信息与从存储芯片读取的数据进行统一处理, 保留不变的, 修改已改变的数据, 再存入地址中。 如果需要读取存储芯片上的数据, 则向 24C08 发送地址读取数据即可, 程序流程图如下图所示。
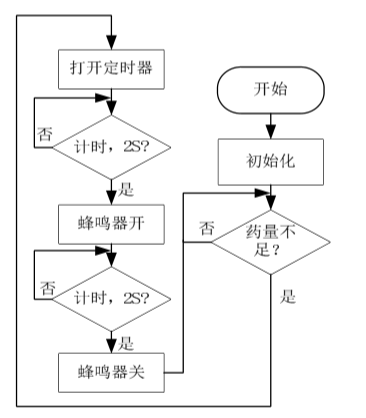
3.3.5 报警电路程序设计
智能药箱与服务器之间每半小时需要药数目的校正, 以便两者之间可以同步。 当药箱内部药量不足时, 就会触发蜂鸣器以示提醒。 蜂鸣器采用是有源蜂鸣器, 接通电流就会发声,整个报警的程序流程图如下图所示。
3.4 部分实现代码
#include <Arduino.h>
#include "MAX30105.h"
#include "heartRate.h"
#include "motor.h"
#define DEBUG
#define OUT_POSITION 1
#define TAKE_POSITION 2
#define OPEN_POSITION 5
bool isTaskTake = false;
int boxdisplacement = 0;
int pillsParameters[2] = {3, 1};
enum BOXNAME { BOX1 = 1, BOX2, BOX3, BOX4, BOX5, BOX6 };
TaskHandle_t taskGreenLEDHandler;
void rotateToOpen(int boxName);
void rotateToClose(int boxName);
void rotateToTake(int boxName);
void rotateToOut(int boxName);
void takePills(int boxName, int pillsNumber);
void taskTakePills(void *pvParameters);
void takePillsTest();
void setup() {
Serial.begin(115200);
delay(1000);
motor_init();
// xTaskCreate(taskPrint, "taskPrint", 1000, NULL, 1, NULL);
}
void loop() {
if (Serial.available()) {
char message = ' ';
message = Serial.read();
if (message == 't') {
if (!isTaskTake) {
isTaskTake = true;
Serial.println("*************n*开始取药过程*n*************");
// xTaskCreate(taskTakePills, "taskTakePills", 20000,
// pillsParameters, 1, NULL);
takePills(3, 1);
} else {
Serial.println("已经有一个取药任务了");
}
}
if (message == 'i') { //开盖
if (!isTaskTake) {
isTaskTake = true;
taskOpenBox(NULL);
isTaskTake = false;
} else {
Serial.println("已经有一个取药任务了");
}
}
if (message == 'j') { //关盖
if (!isTaskTake) {
isTaskTake = true;
taskCloseBox(NULL);
digitalWrite(PIN_ENABLE, HIGH);
isTaskTake = false;
} else {
Serial.println("已经有一个取药任务了");
}
}
if (message == 'm') { //关盖
if (!isTaskTake) {
isTaskTake = true;
digitalWrite(PIN_ENABLE, LOW);
takePillsTest();
digitalWrite(PIN_ENABLE, HIGH);
isTaskTake = false;
} else {
Serial.println("已经有一个取药任务了");
}
}
if (message == 'g') { //左旋
if (!isTaskTake) {
isTaskTake = true;
digitalWrite(PIN_ENABLE, LOW);
taskRotate(LEFT);
boxdisplacement--;
digitalWrite(PIN_ENABLE, HIGH);
isTaskTake = false;
} else {
Serial.println("已经有一个取药任务了");
}
}
if (message == 'h') { //右旋
if (!isTaskTake) {
isTaskTake = true;
digitalWrite(PIN_ENABLE, LOW);
taskRotate(RIGHT);
boxdisplacement++;
digitalWrite(PIN_ENABLE, HIGH);
isTaskTake = false;
} else {
Serial.println("已经有一个取药任务了");
}
}
if (message == 'k') {
if (!isTaskTake) {
isTaskTake = true;
Serial.println("开始推出药盒");
digitalWrite(PIN_ENABLE, LOW);
taskPushBoxOut(NULL);
delay(1000);
Serial.println("开始推入药盒");
taskPullBoxIn(NULL);
digitalWrite(PIN_ENABLE, HIGH);
isTaskTake = false;
} else {
Serial.println("已经有一个取药任务了");
}
}
if (message == '3') {
taskPillsOut(NULL);
}
if (message == 'a') { //开气泵
openPump();
}
if (message == 'b') { //关气泵
closePump();
}
}
}
void rotateToOpen(int boxName) {
int currentPosition = boxName + boxdisplacement;
int targetRotation = OPEN_POSITION - currentPosition;
if (targetRotation >= 0) {
#ifdef DEBUG
Serial.println("rorate right " + String(targetRotation) +
" step to open.");
Serial.println("向右旋转 " + String(targetRotation) + " 步以开盖.");
#endif
for (int i = 0; i < targetRotation; i++) {
taskRotate(RIGHT);
boxdisplacement++;
}
} else {
#ifdef DEBUG
Serial.println("rorate left " + String(-targetRotation) +
" step to open.");
Serial.println("向左旋转 " + String(-targetRotation) + " 步以开盖.");
#endif
for (int i = 0; i < -targetRotation; i++) {
taskRotate(LEFT);
boxdisplacement--;
}
}
}
void rotateToClose(int boxName) {
int currentPosition = boxName + boxdisplacement;
int targetRotation = OPEN_POSITION - currentPosition;
if (targetRotation >= 0) {
#ifdef DEBUG
Serial.println("rorate right " + String(targetRotation) +
" step to close.");
Serial.println("向右旋转 " + String(targetRotation) + " 步以关盖.");
#endif
for (int i = 0; i < targetRotation; i++) {
taskRotate(RIGHT);
boxdisplacement++;
}
} else {
#ifdef DEBUG
Serial.println("rorate right " + String(-targetRotation) +
" step to close.");
Serial.println("向左旋转 " + String(-targetRotation) + " 步以关盖.");
#endif
for (int i = 0; i < -targetRotation; i++) {
taskRotate(LEFT);
boxdisplacement--;
}
}
}
void rotateToTake(int boxName) {
int currentPosition = boxName + boxdisplacement;
int targetRotation = TAKE_POSITION - currentPosition;
if (targetRotation >= 0) {
#ifdef DEBUG
Serial.println("rorate right " + String(targetRotation) +
" step to take pills.");
Serial.println("向右旋转 " + String(targetRotation) + " 步以取药.");
#endif
for (int i = 0; i < targetRotation; i++) {
taskRotate(RIGHT);
boxdisplacement++;
}
} else {
#ifdef DEBUG
Serial.println("rorate right " + String(-targetRotation) +
" step to take pills.");
Serial.println("向左旋转 " + String(-targetRotation) + " 步以取药.");
#endif
for (int i = 0; i < -targetRotation; i++) {
taskRotate(LEFT);
boxdisplacement--;
}
}
}
void rotateToOut(int boxName) {
int currentPosition = boxName + boxdisplacement;
int targetRotation = OUT_POSITION - currentPosition;
if (targetRotation >= 0) {
#ifdef DEBUG
Serial.println("rorate right " + String(targetRotation) +
" step to add pills.");
Serial.println("向右旋转 " + String(targetRotation) + " 步以换(加)药.");
#endif
for (int i = 0; i < targetRotation; i++) {
taskRotate(RIGHT);
boxdisplacement++;
}
} else {
#ifdef DEBUG
Serial.println("rorate right " + String(-targetRotation) +
" step to add pills.");
Serial.println("向左旋转 " + String(-targetRotation) +
" 步以换(加)药.");
#endif
for (int i = 0; i < -targetRotation; i++) {
taskRotate(LEFT);
boxdisplacement--;
}
}
}
void takePills(int boxName, int pillsNumber) {
digitalWrite(PIN_ENABLE, LOW);
// taskPillsUp(NULL);
rotateToOpen(boxName);
taskOpenBox(NULL);
rotateToTake(boxName);
// stepper2.runToNewPosition(5000);
midToLeft();
openPump();
// stepper2.runToNewPosition(6400);
delay(1000);
digitalWrite(PIN_STEPPER2_DIR, LOW);
for (int j = 0; j <= 5; j++) {
for (int i = 0; i < 500; i++) {
digitalWrite(PIN_STEPPER2_STEP, HIGH);
delayMicroseconds(400);
digitalWrite(PIN_STEPPER2_STEP, LOW);
delayMicroseconds(400);
}
delay(500);
digitalWrite(PIN_STEPPER2_DIR, HIGH);
for (int k = 0; k < 500; k++) {
digitalWrite(PIN_STEPPER2_STEP, HIGH);
delayMicroseconds(400);
digitalWrite(PIN_STEPPER2_STEP, LOW);
delayMicroseconds(400);
}
digitalWrite(PIN_STEPPER2_DIR, LOW);
}
// stepper2.setMaxSpeed(2500);
// stepper2.setAcceleration(1500);
// stepper2.runToNewPosition(-20000);
leftToMid();
taskMidToRight(NULL);
closePump();
openAir();
delay(3000);
closeAir();
delay(2000);
taskPillsOut(NULL);
taskRightToMid(NULL);
// xTaskCreate(taskRightToMid, "taskRightToMid", 1000, NULL, 1, NULL);
isTaskTake = false;
digitalWrite(PIN_ENABLE, HIGH);
}
void taskTakePills(void *pvParameters) {
int boxName = ((int *)pvParameters)[0];
int pillsNumber = ((int *)pvParameters)[1];
#ifdef DEBUG
Serial.println("boxName: " + String(boxName));
Serial.println("pillsNumber: " + String(pillsNumber));
#endif
takePills(boxName, pillsNumber);
vTaskDelete(NULL);
}
void takePillsTest() {
midToLeft();
openPump();
// stepper2.runToNewPosition(6400);
delay(1000);
digitalWrite(PIN_STEPPER2_DIR, LOW);
for (int j = 0; j <= 5; j++) {
for (int i = 0; i < 500; i++) {
digitalWrite(PIN_STEPPER2_STEP, HIGH);
delayMicroseconds(400);
digitalWrite(PIN_STEPPER2_STEP, LOW);
delayMicroseconds(400);
}
delay(500);
digitalWrite(PIN_STEPPER2_DIR, HIGH);
for (int k = 0; k < 500; k++) {
digitalWrite(PIN_STEPPER2_STEP, HIGH);
delayMicroseconds(400);
digitalWrite(PIN_STEPPER2_STEP, LOW);
delayMicroseconds(400);
}
digitalWrite(PIN_STEPPER2_DIR, LOW);
}
// stepper2.setMaxSpeed(2500);
// stepper2.setAcceleration(1500);
// stepper2.runToNewPosition(-20000);
leftToMid();
taskMidToRight(NULL);
closePump();
openAir();
delay(3000);
closeAir();
taskRightToMid(NULL);
}
作品展示:

4 最后
最后
以上就是帅气马里奥最近收集整理的关于毕业设计 单片机智能药箱系统 - STM321 简介2 绪论3 系统设计4 最后的全部内容,更多相关毕业设计内容请搜索靠谱客的其他文章。








发表评论 取消回复