1.硬件准备
摄像头、arduino单片机,连接线

(如图为双目摄像头)

(如图为单目摄像头)
摄像头和arduino连接上树莓派
2.软件准备
配置opencv、numpy库
具体配置方法可以看这篇博客:(经验帖)不易出错的树莓派配置opencv方法,解决“No module named ‘cv2‘“问题. 亲测有效_长弓同学的博客-CSDN博客
3.代码
双目摄像头代码
import cv2
import serial
import numpy as np
import time
def connection(str):
ser = serial.Serial('/dev/ttyACM0', 115200, timeout=1)
try:
while(True):
send = str
time.sleep(1)
ser.write(send.encode())
print(send)
str1 = send.readline().decode()
except:
ser.close()
def main():
cap = cv2.VideoCapture(0)
lower_bule = np.array([100, 43, 46])
upwer_bule = np.array([124, 255, 255])
while(True):
ret,frame=cap.read()
frameHSV = cv2.cvtColor(frame, cv2.COLOR_BGR2HSV)
mask = cv2.inRange(frameHSV, lower_bule, upwer_bule)
median = cv2.medianBlur(mask, 5)
res = cv2.bitwise_and(frame, frame, mask=median)
erzhi = cv2.cvtColor(res, cv2.COLOR_BGR2GRAY)
gs = cv2.GaussianBlur(erzhi, (5, 5), 0)
_,contours, hierarchy = cv2.findContours(gs, cv2.RETR_EXTERNAL, cv2.CHAIN_APPROX_SIMPLE)
cv2.drawContours(gs, contours, -1, (0, 255, 255), 2)
area = []
for i in range(len(contours)):
area.append(cv2.contourArea(contours[i]))
max_idx = np.argmax(area)
for i in range(max_idx - 1):
cv2.fillConvexPoly(gs, contours[max_idx - 1], 0)
cv2.fillConvexPoly(gs, contours[max_idx], 255)
moment = cv2.moments(contours[max_idx])
if moment['m00'] != 0:
cx = int(moment['m10'] / moment['m00'])
cy = int(moment['m01'] / moment['m00'])
cnt_centroid=cx, cy
cv2.circle(contours[max_idx],cnt_centroid,5,[255,0,255],-1)
frame = cv2.resize(gs, (256, 256))
#左画面大小
frame_left = frame[:, 0:128]
#右画面大小
frame_right = frame[:, 128:257]
#左画面的图像值
left = np.sum(frame_left == 255)
#右画面的图像值
right = np.sum(frame_right == 255)
full = np.sum(frame == 255)
#print(full)#需要重测
#print(left)
#print(right)
if (left < right & full>80):
connection("L")
print("left")
else:
connection("R")
print("right")
cv2.imshow('frame',gs)
if cv2.waitKey(1)==ord('q'):
break
if __name__ == '__main__':
main()单目摄像头代码:
import cv2
import numpy as np
area = 0
cap = cv2.VideoCapture(1) # 打开摄像头
while True:
ret, frame = cap.read() # 读取摄像头
#BGR转HSV
frameHSV = cv2.cvtColor(frame, cv2.COLOR_BGR2HSV)
#HSV中蓝色的范围
lower_bule = np.array([100, 43, 46])
upwer_bule = np.array([124, 255, 255])
#图像处理去除蓝色以外的颜色
mask = cv2.inRange(frameHSV, lower_bule, upwer_bule)
#中值检测
median = cv2.medianBlur(mask,5)
res = cv2.bitwise_and(frame, frame, mask=mask)
#canny边缘检测
Canny = cv2.Canny(median,10,200)
#二值化操作
# ret , binary = cv2.threshold(mask,0,255,cv2.THRESH_BINARY)
#膨胀操作
#kelnel = np.ones((9,9),np.uint8)
#dilaiton = cv2.dilate(binary,kelnel,iterations=1)
#获取图像轮廓坐标
contours, hierarchy = cv2.findContours(Canny,cv2.RETR_EXTERNAL,cv2.CHAIN_APPROX_SIMPLE)
if len(contours) > 0:
boxes = [cv2.boundingRect(cnt) for cnt in contours]
for box in boxes:
x,y,w,h =box
#画框
cv2.drawContours(frame,contours,-1,(0,0,255),3)
#计算图像面积大小
for i in contours:
area+=cv2.contourArea(i)
print(area)
#图像显示
cv2.imshow('frame',frame)
cv2.imshow('median',median)
cv2.imshow('Canny',Canny)
#cv2.imshow('binary',binary)
#cv2.imshow('kelnel',kelnel)
cv2.imshow("mask",mask)
cv2.imshow("res", res)
if cv2.waitKey(1) & 0xFF == ord('q'): # 按q退出
break
cap.release()
cv2.destroyAllWindows()
# 距离的判断根据色块的大小
# 判断色块位置图像侵占
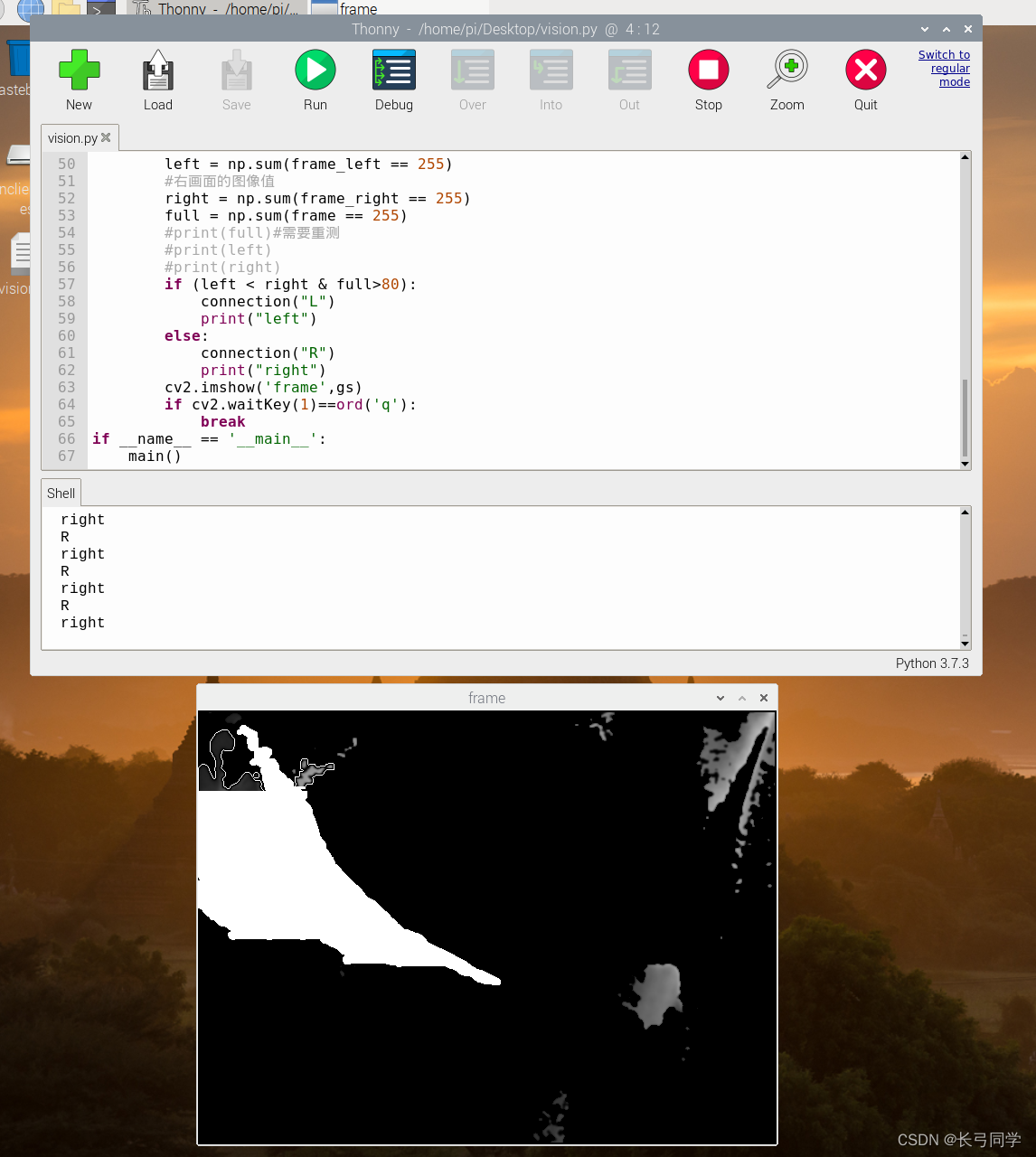
4.运行结果如下
最后
以上就是花痴超短裙最近收集整理的关于树莓派教程——树莓派连接并打开摄像头的全部内容,更多相关树莓派教程——树莓派连接并打开摄像头内容请搜索靠谱客的其他文章。
本图文内容来源于网友提供,作为学习参考使用,或来自网络收集整理,版权属于原作者所有。








发表评论 取消回复