1 背景
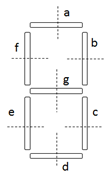
利用opencv识别数码管,采用传统的穿线法,前提是利用深度学习目标检测的方法,在机柜中将数码管区域切割出来,然后再对切割出来的区域进行识别,判断数字是多少。切割出来的形状如图所示:

数码管各段表示为
2 识别思路
先对数码管进行灰度化和二值化,将数字变为255,背景变为0,然后利用穿线法,对abcdefg7个区域依次穿线,判断是否有255的值,有则表示该区域高亮,最后结合7个区域的高亮信息,综合判断数字是多少
a b c d e f g result
0 √ √ √ √ √ √ 63
1 √ √ 6
2 √ √ √ √ √ 91
3 √ √ √ √ √ 79
4 √ √ √ √ 102
5 √ √ √ √ √ 109
6 √ √ √ √ √ √ 125
7 √ √ √ 7
8 √ √ √ √ √ √ √ 127
9 √ √ √ √ √ 1033 灰度化
opencv有自带的灰度化函数cv2.cvtColor(),但是在使用过程中发现,对于一些整体亮度低的数码管灰度化后,会丢失数字信息,看不出来哪段亮,考虑到数码管都是红色的,红色通道的数据最重要,因此设计了一个自己灰度化的函数
def tomygray(image):
height = image.shape[0]
width = image.shape[1]
gray = np.zeros((height, width, 1), np.uint8)
for i in range(height):
for j in range(width):
# pixel = max(image[i,j][0], image[i,j][1], image[i,j][2])
pixel = 0.0 * image[i, j][0] + 0.0 * image[i, j][1] + 1 * image[i, j][2]
gray[i, j] = pixel
return gray 4 二值化
opencv有多种二值化的方法,主要包括固定阈值和自适应阈值的方法,具体介绍可看《OpenCV之阈值化操作总结》
自适应阈值主要适用于一张图片中亮度不一样的情况,而对于我们的数码管来说,由于大小很小,基本上没有亮度变化,因此使用固定阈值的方法即可。函数原型如下
ret, dst = cv2.threshold(src, thresh, maxval, type)
函数最重要的部分是thresh值的设置,由于不同图片的数码管亮度不同,不可以选择同一个阈值,需要分别计算每张图片的固定阈值,计算阈值有很多方法,我用到的方法有以下两种
4.1 统计直方图
统计直方图中像素的分布情况,根据数量最多的像素值来设置一个阈值(下边的参数都是调试效果比较好的值,自己可根据具体情况来设置)
hist = cv2.calcHist([image_gray], [0], None, [256], [0,256])
#plt.hist(hist.ravel(), 256, [0,256])
#plt.savefig(filename + "_hist.png")
#plt.show()
min_val, max_val, min_index, max_index = cv2.minMaxLoc(hist)
ret, image_bin = cv2.threshold(image_gray, int(max_index[1])-7, 255,
cv2.THRESH_BINARY)4.2 计算平均值
计算灰度图的平均像素值,根据平均值设定阈值
mean,stddev = cv2.meanStdDev(image_gray)
ret, image_bin = cv2.threshold(image_gray, meanvalue + 65, 255,
cv2.THRESH_BINARY)5 穿线法
得到二值化的图像后,将图像进行分割,切成一个一个的数字,然后每个都用穿线法来判断值是多少
def TubeIdentification(filename, num, image):
tube = 0
tubo_roi = [
[image.shape[0] * 0/3, image.shape[0] * 1/3, image.shape[1] * 1/2,
image.shape[1] * 1/2],
[image.shape[0] * 1/3, image.shape[0] * 1/3, image.shape[1] * 2/3,
image.shape[1] - 1 ],
[image.shape[0] * 2/3, image.shape[0] * 2/3, image.shape[1] * 2/3,
image.shape[1] - 1 ],
[image.shape[0] * 2/3, image.shape[0] -1 , image.shape[1] * 1/2,
image.shape[1] * 1/2],
[image.shape[0] * 2/3, image.shape[0] * 2/3, image.shape[1] * 0/3,
image.shape[1] * 1/3],
[image.shape[0] * 1/3, image.shape[0] * 1/3, image.shape[1] * 0/3,
image.shape[1] * 1/3],
[image.shape[0] * 1/3, image.shape[0] * 2/3, image.shape[1] * 1/2,
image.shape[1] * 1/2]]
i = 0
while(i < 7):
if(Iswhite(image, int(tubo_roi[i][0]), int(tubo_roi[i][1]),
int(tubo_roi[i][2]),int(tubo_roi[i][3]))):
tube = tube + pow(2,i)
cv2.line(image, ( int(tubo_roi[i][3]),int(tubo_roi[i][1])),
(int(tubo_roi[i][2]), int(tubo_roi[i][0])),
(255,0,0), 1)
i += 1
if(tube==63):
onenumber = 0
elif(tube==6):
onenumber = 1
elif(tube==91):
onenumber = 2
elif(tube==79):
onenumber = 3
elif(tube==102 or tube==110):
#110是因为有干扰情况
onenumber = 4
elif(tube==109):
onenumber = 5
elif(tube==125):
onenumber = 6
elif(tube==7):
onenumber = 7
elif(tube==127):
onenumber = 8
elif(tube==103):
onenumber = 9
else:
onenumber = -1
cv2.imwrite(filename + '_' + str(num) + '_' + str(onenumber) + '.png', image)
return onenumber
def Iswhite(image, row_start, row_end, col_start, col_end):
white_num = 0
j=row_start
i=col_start
while(j <= row_end):
while(i <= col_end):
if(image[j][i] == 255):
white_num+=1
i+=1
j+=1
i=col_start
#print('white num is',white_num)
if(white_num >= 5):
return True
else:
return False
6 识别主程序
def digitalrec(image):
filename = str(image).split(".jpg", 1)[0]
image_org = cv2.imread(image)
height = image_org.shape[0]
width = image_org.shape[1]
#transe image to gray
#image_gray = cv2.cvtColor(image_org, cv2.COLOR_RGB2GRAY)
image_gray = tomygray(image_org)
cv2.imwrite(filename + '_gray.png',image_gray)
meanvalue = image_gray.mean()
if meanvalue >= 200:
hist = cv2.calcHist([image_gray], [0], None, [256], [0,256])
#plt.hist(hist.ravel(), 256, [0,256])
#plt.savefig(filename + "_hist.png")
#plt.show()
min_val, max_val, min_index, max_index = cv2.minMaxLoc(hist)
ret, image_bin = cv2.threshold(image_gray, int(max_index[1])-7, 255,
cv2.THRESH_BINARY)
else:
mean,stddev = cv2.meanStdDev(image_gray)
ret, image_bin = cv2.threshold(image_gray, meanvalue + 65, 255,
cv2.THRESH_BINARY)
#image_bin = cv2.adaptiveThreshold(image_gray, 255,
# cv2.ADAPTIVE_THRESH_GAUSSIAN_C,
# cv2.THRESH_BINARY, 11,
# 0)
x, y, w, h = cv2.boundingRect(image_bin)
image_bin = image_bin[max(y-5,0) : h+10, max(x-5,0) : w+10]
cv2.imwrite(filename + '_bin.png',image_bin)
#split number and identify it
num = 0
result = ''
while True:
if(num < 3):
roi = image_bin[0: height, int(width / 3 * num):
int(width / 3 * (num + 1))]
onenumber = TubeIdentification(filename, num, roi)
if(onenumber == -1):
result += "0"
else:
result += str(onenumber)
num += 1
else:
break
print("picture of %s detect result is %s"%(filename,result))
return result7 识别效果

8 展望
上边介绍的方法可以实现数码管的识别,但是由于有很多对像素的操作,比较耗时,平均识别一张图片需要2s左右,而且使用传统的方法来识别数码管,涉及到很多参数的设置与调试,鲁棒性不强,尤其是在灰度化和二值化的时候,参数设置很关键。
最好的解决方法是可以利用深度学习的方法来识别,提高识别率,有时间的话会尝试新的方法来解决。
最后
以上就是虚拟高跟鞋最近收集整理的关于OpenCV之七段数码管识别(含代码)1 背景2 识别思路3 灰度化4 二值化5 穿线法6 识别主程序7 识别效果8 展望的全部内容,更多相关OpenCV之七段数码管识别(含代码)1内容请搜索靠谱客的其他文章。






![6.0 动态数码管 _ [AT89C51/2] [从零开始的单片机]](https://www.shuijiaxian.com/files_image/reation/bcimg21.png)

发表评论 取消回复