Vehicle Body Total Road Load
汽车总负载模块
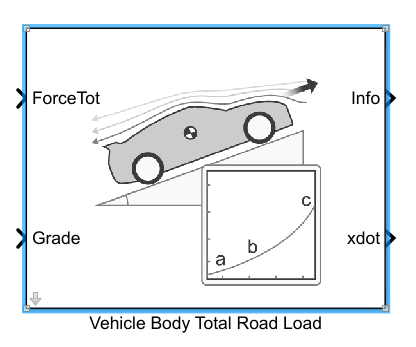
作用: 使用滑行测试产生的系数来描述车辆运动
原理公式:
F
r
o
a
d
=
a
+
b
x
˙
+
c
x
¨
+
m
g
sin
θ
F_{road}=a + bdot x + c ddot x + mgsin {theta}
Froad=a+bx˙+cx¨+mgsinθ
F
t
o
t
a
l
=
m
x
¨
+
F
r
o
a
d
F_{total} = m ddot x + F_{road}
Ftotal=mx¨+Froad
式中:
- F r o a d F_{road} Froad 为总负载力 (ForceTot)
- F t o t a l F_{total} Ftotal 为总牵引力 (PwrTot)
- x ˙ dot x x˙ 为纵向速度(xdot)
- a a a为静态滚动阻力
- b b b为动态滚动阻力系数与传动系统粘性阻力系数之和
- c c c为风阻系数
- m m m为汽车总质量
- g g g为重力加速度
- θ theta θ为坡度角(grade)
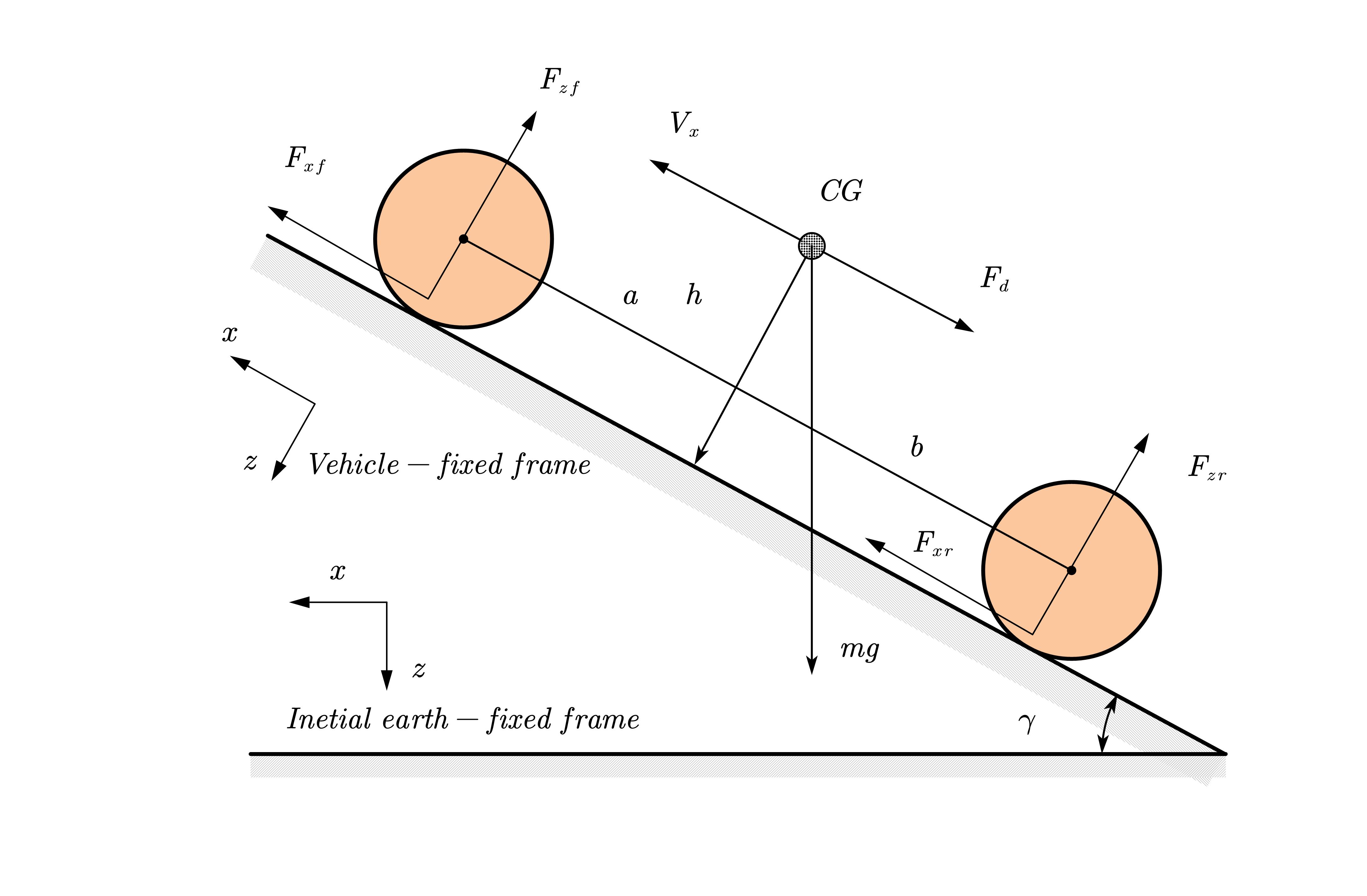
Vehicle Body 1 DOF Longitudinal
汽车纵向运动一自由度模型
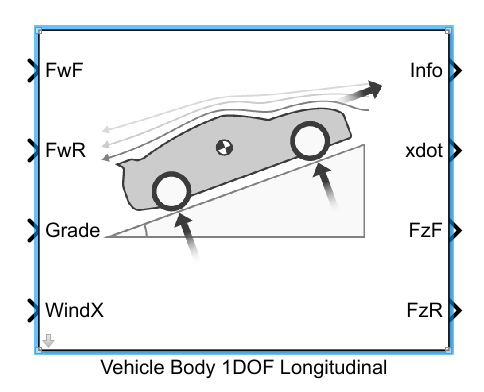
作用:使用双轴模型描述车辆正反向运动,相对于前一个模块,该模块完善了空气阻力的公式,并且考虑了前后轴负载在加减速等情况下的分配问题。忽略了牵引力和滚动阻力等的计算,它们的合力称为纵向力
原理公式:
m
V
˙
x
=
F
x
−
F
d
−
m
g
⋅
sin
γ
mdot{V}_x=F_x-F_d-mgcdot sin gamma
mV˙x=Fx−Fd−mg⋅sinγ
F x = N f F x f + N r F x r F_x=N_fF_{xf}+N_rF_{xr} Fx=NfFxf+NrFxr
F d = 1 2 C d ρ A ( V x + V w ) 2 ⋅ s g n ( V x + V w ) F_d=frac{1}{2}C_drho A( V_x+V_w) ^2cdot sgn(V_x +V_w) Fd=21CdρA(Vx+Vw)2⋅sgn(Vx+Vw)
F z f = − h ( F d + m g sin γ + m V ˙ x ) + b ⋅ m g cos γ N r ( a + b ) F_{zf}=frac{-hleft( F_d+mgsin gamma +mdot{V}_x right) +bcdot mgcos gamma}{N_rleft( a+b right)} Fzf=Nr(a+b)−h(Fd+mgsinγ+mV˙x)+b⋅mgcosγ
F z r = + h ( F d + m g sin γ + m V ˙ x ) + a ⋅ m g cos γ N r ( a + b ) F_{zr}=frac{+hleft( F_d+mgsin gamma +mdot{V}_x right) +acdot mgcos gamma}{N_rleft( a+b right)} Fzr=Nr(a+b)+h(Fd+mgsinγ+mV˙x)+a⋅mgcosγ
N
f
F
z
f
+
N
r
F
z
r
=
m
g
cos
γ
N_fF_{zf}+N_rF_{zr}=mgcos gamma
NfFzf+NrFzr=mgcosγ
式中:
- F x f , F x r F_{xf},F_{xr} Fxf,Fxr为地面作用在单个前(后)轮上的总的纵向作用力(FwF,FwR)
- F z f , F z r F_{zf},F_{zr} Fzf,Fzr为地面作用在,单个前(后)轮上的负载反作用力(FzF,FzR)
- F d F_d Fd为风阻力
- V x V_x Vx车辆的速度,大于零时正向移动,小于零时负向移动
- V w V_w Vw风速,绝对量,相对于地球坐标系
- N f , N r N_f,N_r Nf,Nr前轮数量,后轮数量
- γ gamma γ坡度角
- m m m汽车质量
- a , b a,b a,b前后轴与质心的距离
- h h h 质心与地面的距离
- C d C_d Cd 风阻系数
- A A A 正面迎风面积
- ρ rho ρ空气密度
-
g
g
g重力加速度
注: 牵引力和滚动阻力合力成总的纵向作用力,实际上当牵引力为负时,其又名制动力。
Vehicle Body 3DOF Single Track
汽车三自由度单轨模型
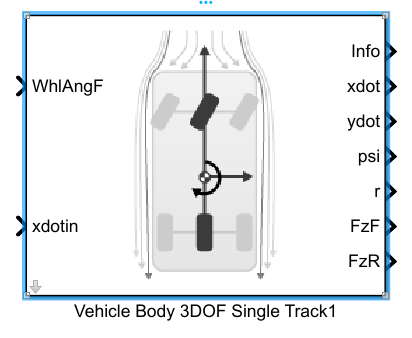
描述:汽车三自由度运动包括纵向、横向和偏航,单轨模型质心在前轴和后轴的中心线上。其不考虑横向载荷分配。
模块输入端口:
- WhlAngF — Front wheel steering angles,前轮转角 δ F delta_F δF
- WhlAngR — Rear wheel steering angles,后轮转角 δ R delta_R δR
- xdotin — Longitudinal velocity,汽车纵向速度
- FwF — Total force on the front wheels,地面对单个前轮的总的纵向力
- FwR — Total force on the rear wheels,地面对单个后轮的总的纵向力
- WindXYZ — Wind speed各方向风速,世界坐标系 x,y,z
- Mu — Tire friction coefficient,摩擦系数
- Fext — External force on vehicle CG,个方向对质心的力,车辆坐标系
- Mext — External moment about vehicle CG,各方向对质心的转矩,车辆坐标系
模块输出端口:
- Info — Bus signal
- xdot — Vehicle longitudinal velocity,汽车纵向速度
- ydot — Vehicle lateral velocity,汽车横向速度
- psi — Yaw,汽车的偏航角
- r — Yaw rate,汽车偏航角速度
- FzF — Normal force on front wheels,地面对前轮的法向支持力
- FzR — Normal force on rear wheels,地面对后轮的法向支持力
最后
以上就是酷酷树叶最近收集整理的关于Vehicle Dynamic Blockset #Vehicle BodyVehicle Body Total Road LoadVehicle Body 1 DOF LongitudinalVehicle Body 3DOF Single Track的全部内容,更多相关Vehicle内容请搜索靠谱客的其他文章。








发表评论 取消回复