1.简介
自动驾驶仿真实验台是一款集模块化、简洁化、可定制化为一身的自动驾驶汽车教育及科研软硬件一体化平台,以自主研发的面向汽车自动驾驶技术与产品研发的一体化仿真与测试平台——PanoSim,为自动驾驶仿真实验台的技术核心。
2.平台特性
- 该平台模块化的设计,可以从感知、控制、执行三个层面进行软硬件替换,覆盖智能汽车研发、实践与教学的全链路,满足不同的客户群体;
- 高精度的车辆动力学模型,满足科研用户对车辆数字化要求;
- 高保真三维渲染场景、人机工程学座舱、类真车力感方向盘,为用户提供沉浸式驾驶体验;
- 预置ADAS算法实验,满足用户智能驾驶操作体验,便于了解、学习智能驾驶汽车;
- 友好的HMI交互设计,实验平台操作方便;
- 开放式接口模块,支持驾驶员行为分析、疲劳检测,车载通信单元等外部设备的接入。
3.主要实现方式和产品功能
智能汽车仿真平台硬件部分主要由两部分组成,驾驶座舱及控制硬件部分及高保真场景服务器部分,软件部分主要是由一体化仿真测试平台PanoSim5.0、高保真场景地图以及ADAS算法预置实验所构成。
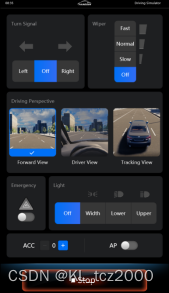
基于PanoSim5.0的系统环境配置,用户可以实现通过触摸屏打开HMI界面选择预置实验,Start开始运行实验;运行实验后,会弹出如下图所示界面,用户可以根据界面上功能开关,选择驾驶视角、车灯、雨刷以及算法使能,用户也可以根据自身需要进行添加新建实验或算法编写,通过仿真实验台实现个人需求。


4.基于V2X的测试预警场景
HLW:前方有事故或有障碍物出现触发预警
在车辆行驶过程中,经常会遇到违规车辆违规行驶导致事故发生,一旦发生交通事故,在临近事故地的驾驶员无法第一时间得知事故情况,HLW告警可以提醒驾驶员及时改变规划路线,以便于交通通畅,防止事故损失扩大
IVS:前方有告示牌时触发预警
在车辆行驶过程中,告示牌可能会因为车辆等物体遮挡而进入视野盲区,为防止驾驶员因没有及时发现告示牌提示而发生交通事故,IVS的算法提前预警给驾驶员提供了第二方案。
RLVW:误闯红灯触发预警
在车辆行驶过程中,驾驶员没有注意到红灯已亮起的情况下提前触发闯红灯预警,防止意外发生。
VRUCW:行人突然从视野盲区出现触发碰撞预警
在车辆行驶过程中,因前方车辆遮挡,驾驶员可能未及时发现遮挡物背后的行人,VRUCW算法可以在靠近行人一定距离时提醒驾驶员注意,防止意外发生。
5.ACC/LCC自适应巡航和车道保持
驾驶员在车辆行驶过程中可以开启ACC自动控制车速进行自适应巡航,此时驾驶员可脱离油门和刹车,ACC设计一共三个挡位,可提供不同的行驶速度反馈,同时能够在前方出现其他车辆时自动识别并减速至稳定行驶,待车辆离开后继续恢复至预设挡位车速;开启LCC可以实现车道保持,此时驾驶员可脱离方向盘,汽车会根据车道线保持稳定行驶在车道线内;同时开启ACC/LCC即可以实现车辆自动驾驶。

最后
以上就是害羞机器猫最近收集整理的关于基于PanoSim的自动驾驶仿真实验台——智能驾驶算法开发实践1.简介2.平台特性3.主要实现方式和产品功能5.ACC/LCC自适应巡航和车道保持 的全部内容,更多相关基于PanoSim内容请搜索靠谱客的其他文章。








发表评论 取消回复