文章目录
- ch1 矢量运算
- 基本概念
- 矢量列阵
- 矢量阵的运算
- 矢量的代数描述(重点)
- 坐标阵
- 坐标方阵
- 矢量运算和坐标阵的运算(*)
- 平面矢量
- 法矢量与平面矢量的叉积
ch1 矢量运算
基本概念
两重叉积
a
⃗
×
(
b
⃗
×
c
⃗
)
=
b
⃗
(
a
⃗
⋅
c
⃗
)
−
(
b
⃗
⋅
a
⃗
)
c
⃗
quad vec{a} times(vec{b} times vec{c})=vec{b}(vec{a} cdot vec{c})-(vec{b} cdot vec{a}) vec{c}
a×(b×c)=b(a⋅c)−(b⋅a)c
混合积
a
⃗
⋅
(
b
⃗
×
c
⃗
)
=
c
⃗
⋅
(
a
⃗
×
b
⃗
)
=
b
⃗
⋅
(
c
⃗
×
a
⃗
)
quad vec{a} cdot(vec{b} times vec{c})=vec{c} cdot(vec{a} times vec{b})=vec{b} cdot(vec{c} times vec{a})
a⋅(b×c)=c⋅(a×b)=b⋅(c×a)
矢量基: 三个相互正交的矢量构成的三维空间
基点:原点O
基矢量:构成矢量基的三个单位矢量
e
⃗
1
,
e
⃗
2
,
e
⃗
3
quad vec{e}_{1}, quad vec{e}_{2}, quad vec{e}_{3}
e1,e2,e3
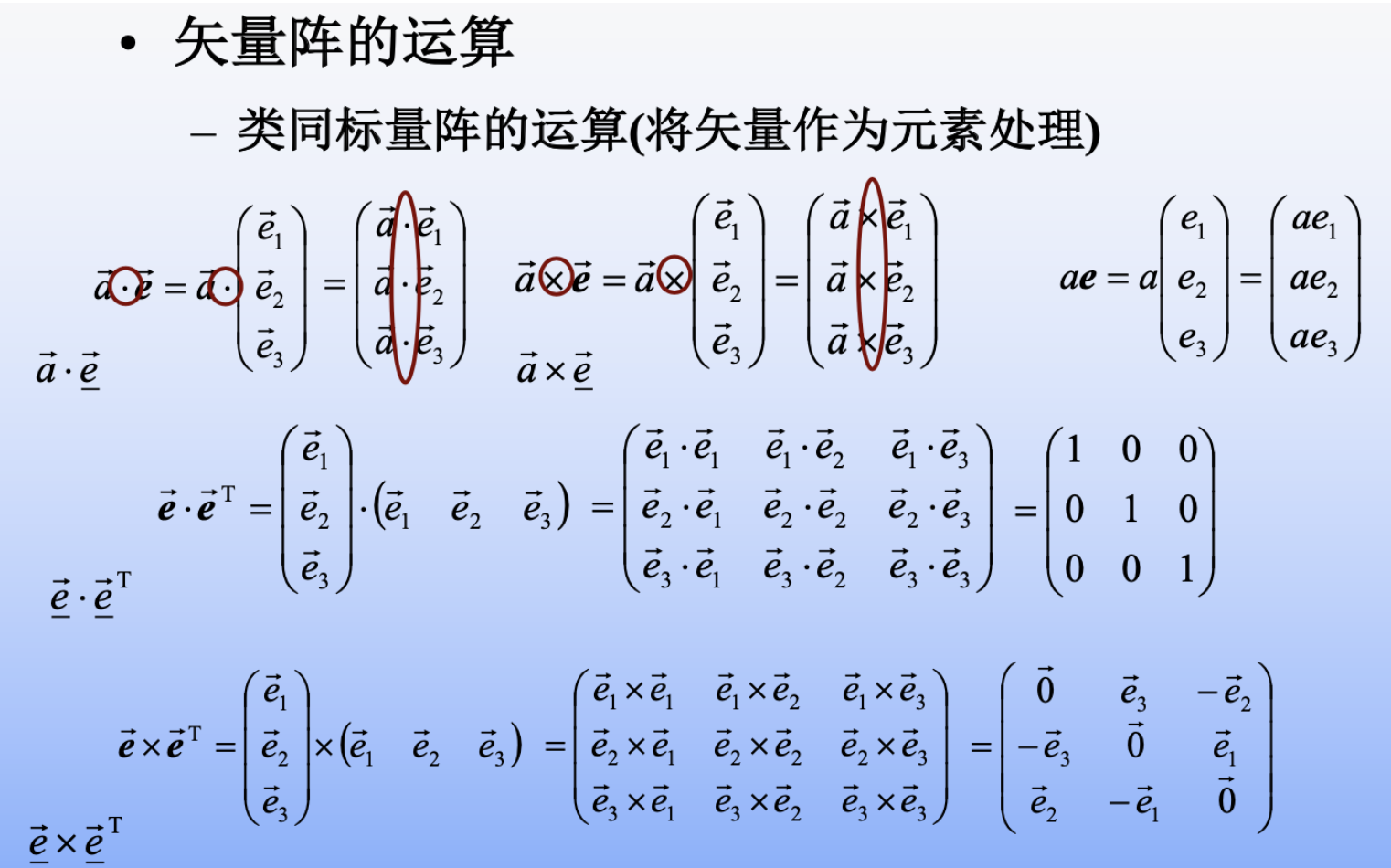
单位矢量 e ⃗ α ⋅ e ⃗ β = δ α β α , β = 1 , 2 , 3 quad vec{e}_{alpha} cdot vec{e}_{beta}=delta_{alpha beta} quad alpha, beta=1,2,3 eα⋅eβ=δαβα,β=1,2,3
δ α β = { 1 当 α = β 0 当 α ≠ β e ⃗ 1 ⋅ e ⃗ 1 = δ 11 = 1 e ⃗ 2 ⋅ e ⃗ 1 = δ 21 = 0 begin{array}{c} delta_{alpha beta}=left{begin{array}{ll} 1 & text { 当 } alpha=beta \ 0 & text { 当 } alpha neq beta end{array}right. \ vec{e}_{1} cdot vec{e}_{1}=delta_{11}=1 & vec{e}_{2} cdot vec{e}_{1}=delta_{21}=0 end{array} δαβ={10 当 α=β 当 α=βe1⋅e1=δ11=1e2⋅e1=δ21=0
矢量列阵
定义
e
⃗
=
(
e
⃗
1
e
⃗
2
e
⃗
2
)
=
(
e
⃗
1
e
⃗
2
e
⃗
3
)
T
vec{e}=left(begin{array}{l} vec{e}_{1} \ vec{e}_{2} \ vec{e}_{2} end{array}right)=left(begin{array}{lll} vec{e}_{1} & vec{e}_{2} & vec{e}_{3} end{array}right)^{mathrm{T}}
e=⎝⎛e1e2e2⎠⎞=(e1e2e3)T
右旋正交
e
⃗
α
×
e
⃗
β
=
ε
α
β
γ
e
⃗
γ
α
,
β
,
γ
=
1
,
2
,
3
ε
α
β
γ
=
{
+
1
当
α
,
β
,
依次循环
−
1
其余
vec{e}_{alpha} times vec{e}_{beta}=varepsilon_{alpha beta gamma} vec{e}_{gamma} \ alpha, beta, gamma = 1,2,3 \ varepsilon_{alpha beta gamma}=left{begin{array}{ll} +1 & text { 当 } alpha, beta, text { 依次循环 } \ -1 & text { 其余 } end{array}right.
eα×eβ=εαβγeγα,β,γ=1,2,3εαβγ={+1−1 当 α,β, 依次循环 其余
矢量阵的运算
矢量的代数描述(重点)
坐标阵
a = ( a 1 a 2 a 3 ) T boldsymbol{a}=left(begin{array}{lll} a_{1} & a_{2} & a_{3} end{array}right)^{mathrm{T}} a=(a1a2a3)T
在给定的矢量基下,矢量与 其的坐标阵一一对应
坐标阵又称“代数矢量”
坐标阵和矢量的相互表示
a
=
(
a
1
a
2
a
3
)
=
(
a
⃗
⋅
e
⃗
1
a
⃗
⋅
e
⃗
2
a
⃗
⋅
e
⃗
3
)
=
a
⃗
⋅
(
e
⃗
1
e
⃗
2
e
⃗
3
)
begin{array}{r} boldsymbol{a}=left(begin{array}{l} a_{1} \ a_{2} \ a_{3} end{array}right)=left(begin{array}{l} vec{a} cdot vec{e}_{1} \ vec{a} cdot vec{e}_{2} \ vec{a} cdot vec{e}_{3} end{array}right)=vec{a} cdotleft(begin{array}{l} vec{e}_{1} \ vec{e}_{2} \ vec{e}_{3} end{array}right) end{array}
a=⎝⎛a1a2a3⎠⎞=⎝⎛a⋅e1a⋅e2a⋅e3⎠⎞=a⋅⎝⎛e1e2e3⎠⎞
a = a ⃗ ⋅ e ⃗ = e ⃗ ⋅ a ⃗ a ⃗ = e ⃗ T a a ⃗ = a T e ⃗ boldsymbol{a}=vec{a} cdot vec{e}=vec{e} cdot vec{a} \ vec{boldsymbol{a}}=vec{boldsymbol{e}}^{mathrm{T}} boldsymbol{a} \ vec{boldsymbol{a}}={boldsymbol{a}}^{mathrm{T}} vec{boldsymbol{e}} a=a⋅e=e⋅aa=eTaa=aTe
坐标方阵
反对称阵
a
~
=
(
0
−
a
3
a
2
a
3
0
−
a
1
−
a
2
a
1
0
)
tilde{boldsymbol{a}}=left(begin{array}{ccc} 0 & -a_{3} & a_{2} \ a_{3} & 0 & -a_{1} \ -a_{2} & a_{1} & 0 end{array}right)
a~=⎝⎛0a3−a2−a30a1a2−a10⎠⎞
矢量运算和坐标阵的运算(*)
矢量式
a
⃗
=
b
⃗
c
⃗
=
a
⃗
+
b
⃗
c
⃗
=
α
a
⃗
α
=
a
⃗
⋅
b
⃗
=
b
⃗
⋅
a
⃗
c
⃗
=
a
⃗
×
b
⃗
=
−
b
⃗
×
a
⃗
begin{array}{c} vec{a}=vec{b} \ vec{c}=vec{a}+vec{b} \ vec{c}=alpha vec{a} \ alpha=vec{a} cdot vec{b}=vec{b} cdot vec{a} \ vec{c}=vec{a} times vec{b}=-vec{b} times vec{a} end{array}
a=bc=a+bc=αaα=a⋅b=b⋅ac=a×b=−b×a
坐标阵运算式
a
=
b
c
=
a
+
b
c
=
α
a
α
=
a
T
b
=
b
T
a
c
=
a
~
b
=
−
b
~
a
begin{array}{c} a=b \ c=a+b \ c=alpha a \ alpha=a^{mathrm{T}} b=b^{mathrm{T}} a \ c=tilde{a} b=-tilde{b} a end{array}
a=bc=a+bc=αaα=aTb=bTac=a~b=−b~a
平面矢量
定义
-
当所有的矢量的变化与运算均发生在同一平面内
-
这些矢量仅可能与 垂直 于该平面的矢量发生运算
-
这些矢量的代数描述可在一个二维空间中进行
平面矢量基
基矢量
x
⃗
vec{x}
x 与
y
⃗
vec{y}
y 构成一平面矢量基
e
→
overrightarrow{boldsymbol{e}}
e
e
→
=
(
x
⃗
,
y
⃗
)
T
overrightarrow{boldsymbol{e}}=(vec{x}, vec{y})^{mathrm{T}}
e=(x,y)T
垂直于该平面的单位矢量记为 改 且
z
⃗
=
x
⃗
×
y
⃗
vec{z}=vec{x} times vec{y}
z=x×y
单位矢量
Z
⃗
vec{Z}
Z 称法矢量
c = a ~ b = ( 0 0 a y 0 0 − a x − a y a x 0 ) ( b x b y 0 ) = ( 0 0 a x b y − a y b x ) 矢量 c ⃗ = a ⃗ × b ⃗ 的模 c = a x b y − a y b x begin{aligned} &boldsymbol{c}=tilde{boldsymbol{a}} boldsymbol{b}=left(begin{array}{ccc} 0 & 0 & a_{y} \ 0 & 0 & -a_{x} \ -a_{y} & a_{x} & 0 end{array}right)left(begin{array}{c} b_{x} \ b_{y} \ 0 end{array}right)=left(begin{array}{c} 0 \ 0 \ a_{x} b_{y}-a_{y} b_{x} end{array}right)\ &text { 矢量 } vec{c}=vec{a} times vec{b} text { 的模 } quad c=a_{x} b_{y}-a_{y} b_{x} end{aligned} c=a~b=⎝⎛00−ay00axay−ax0⎠⎞⎝⎛bxby0⎠⎞=⎝⎛00axby−aybx⎠⎞ 矢量 c=a×b 的模 c=axby−aybx
c ⃗ = ( a x b y − a v b x ) z ⃗ vec{c}=left(a_{x} b_{y}-a_{v} b_{x}right) vec{z} c=(axby−avbx)z
引 入 反 对 称 阵 I ~ = def ( 0 − 1 1 0 ) c = ( I ~ a ) T b = [ ( 0 − 1 1 0 ) ( a x a y ) ] T ( b x b y ) = a x b y − a y b x 引入反对称阵quad tilde{I} stackrel{text { def }}{=}left(begin{array}{cc} 0 & -1 \ 1 & 0 end{array}right) \ c=(tilde{I} a)^{mathrm{T}} b=left[left(begin{array}{cc} 0 & -1 \ 1 & 0 end{array}right)left(begin{array}{l} a_{x} \ a_{y} end{array}right)right]^{mathrm{T}}left(begin{array}{l} b_{x} \ b_{y} end{array}right)=a_{x} b_{y}-a_{y} b_ {x} 引入反对称阵I~= def (01−10)c=(I~a)Tb=[(01−10)(axay)]T(bxby)=axby−aybx
c ⃗ = a ⃗ × b ⃗ = ( I ‾ ~ a ‾ ) T b ‾ z ⃗ vec{c}=vec{a} times vec{b}=(tilde{underline{I}}underline{a})^{mathrm{T}} underline{b} vec{z} c=a×b=(I~a)Tbz
法矢量与平面矢量的叉积
矢量
a
⃗
^
hat{vec{a}}
a^ 为矢量
a
⃗
vec{a}
a 绕法矢量逆时针旋转90度
a
⃗
^
=
z
⃗
×
a
⃗
=
−
a
y
x
⃗
+
a
x
y
⃗
hat{vec{a}}=vec{z} times vec{a}=-a_{y} vec{x}+a_{x} vec{y}
a^=z×a=−ayx+axy
a ^ = ( 0 − 1 1 0 ) ( a x a y ) = ( − a y a x ) hat{boldsymbol{a}}=left(begin{array}{cc} 0 & -1 \ 1 & 0 end{array}right)left(begin{array}{l} a_{x} \ a_{y} end{array}right)=left(begin{array}{c} -a_{y} \ a_{x} end{array}right) a^=(01−10)(axay)=(−ayax)
反对称阵
I
~
tilde{boldsymbol{I}}
I~的性质
I
~
T
=
−
I
~
I
~
=
−
I
I
~
T
I
~
=
I
~
I
~
T
=
I
begin{array}{l} tilde{boldsymbol{I}}^{mathrm{T}}=-tilde{boldsymbol{I}} \ widetilde{boldsymbol{I}}=-boldsymbol{I} \ tilde{boldsymbol{I}}^{mathrm{T}} tilde{boldsymbol{I}}=tilde{boldsymbol{I}} tilde{boldsymbol{I}}^{mathrm{T}}=boldsymbol{I} end{array}
I~T=−I~I
=−II~TI~=I~I~T=I
I ~ = ( 0 − 1 1 0 ) ( 0 − 1 1 0 ) ( 0 − 1 1 0 ) = ( − 1 0 0 − 1 ) ( 0 1 − 1 0 ) ( 0 − 1 1 0 ) = ( 1 0 0 1 ) begin{array}{r} tilde{I}=left(begin{array}{cc} 0 & -1 \ 1 & 0 end{array}right) \ left(begin{array}{cc} 0 & -1 \ 1 & 0 end{array}right)left(begin{array}{cc} 0 & -1 \ 1 & 0 end{array}right)=left(begin{array}{cc} -1 & 0 \ 0 & -1 end{array}right) \ left(begin{array}{cc} 0 & 1 \ -1 & 0 end{array}right)left(begin{array}{cc} 0 & -1 \ 1 & 0 end{array}right)=left(begin{array}{cc} 1 & 0 \ 0 & 1 end{array}right) end{array} I~=(01−10)(01−10)(01−10)=(−100−1)(0−110)(01−10)=(1001)
最后
以上就是欢喜小蝴蝶最近收集整理的关于理论力学-ch1矢量运算的全部内容,更多相关理论力学-ch1矢量运算内容请搜索靠谱客的其他文章。








发表评论 取消回复