NIPS2014

思路:
将unlabeled 图像进行旋转、平移、增强等操作,组成不同的数据集合(同一图像生成的图像为同一数据集合)。利用CNN 将不同数据集合区分开。
目标:
区分不同图像,保证平移等变换的鲁棒性。
网络结构:
small: two convolutional layers with 64 filters each followed by a fully connected layer with 128 neurons.
large: three convolutional layers with 64,128,256 filters respectively followed by a fully connected layer with 512 neurons.
kernel size: 5*5
2*2 max pooling after the first two convolutional layers
dropout was applied to the fully connected layers
code and training data : codes .
流程:
feature-map->pooling->svm
pooling: 1) 4 -quadrant max-pooling 2) 3-layer spatial pyramid, i.e. max-pooling over the whole images as well as within 4 quadrants and within the cells of a
4*4 grid (1+4+16) 空间金字塔池化
结果:
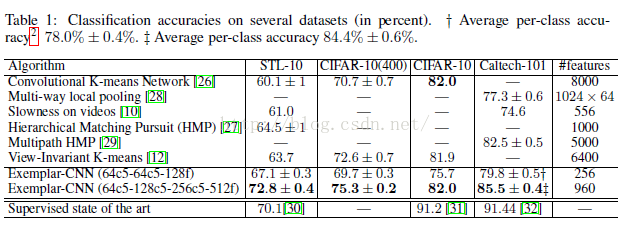
比其他无监督特征学习结果要好,但是整体比监督学习略差
讨论:
1. 子类别数量(图像数量)。
50-8000,监测正确率随类别数增加而增加。 8000-32000, 保持不变甚至降低
网络增大时,最优类别数增加,直至饱和。(算法不足之处:最优类别数不定)
2. 每个子类别中图像数量
1-300. 检测正确率先增加(100)后饱和。
3. 变化类型
旋转和缩放影响较小,平移,颜色变化和对比度变化影响较大
4.学习特征的不变性
第三层和最终的pooling层学习到的特征和HOG相似
不足之处:
1.对于不同数据集和网络结构,最优类别数不定
2.所学习到的特征不变性较为简单
feature-map->pooling->svm
pooling: 1) 4 -quadrant max-pooling 2) 3-layer spatial pyramid, i.e. max-pooling over the whole images as well as within 4 quadrants and within the cells of a
4*4 grid (1+4+16) 空间金字塔池化
最后
以上就是碧蓝白昼最近收集整理的关于Discriminative unsupervised feature learning with convolutional neural networks的全部内容,更多相关Discriminative内容请搜索靠谱客的其他文章。








发表评论 取消回复