本文主要整理和参考了李宏毅的强化学习系列课程和莫烦python的强化学习教程
本系列主要分几个部分进行介绍
- 强化学习背景介绍
- SARSA算法原理和Agent实现
- Q-learning算法原理和Agent实现
- DQN算法原理和Agent实现(tensorflow)
- Double-DQN、Dueling DQN算法原理和Agent实现(tensorflow)
- Policy Gradients算法原理和Agent实现(tensorflow)
- Actor-Critic、A2C、A3C算法原理和Agent实现(tensorflow)
一、Q-learning算法原理
先回顾一下RL的一些知识和SARSA。
Q-learning是一种value_based的方法。Q-learning与SARSA算法形式十分相近,但 Q-learning再执行动作a到达状态s’后,无需再执行动作a_来得到
Q
∗
(
s
,
a
)
=
r
+
γ
Q
(
s
′
,
a
′
)
Q_*(s,a)=r+γQ(s',a')
Q∗(s,a)=r+γQ(s′,a′)
而直接从s’观察状态所执行的动作得到的最大值,
Q
∗
(
s
,
a
)
=
r
+
γ
m
a
x
[
Q
(
s
′
,
_
)
]
Q_*(s,a)=r+γmax[Q(s',_)]
Q∗(s,a)=r+γmax[Q(s′,_)]。可见, Q-learning并未真实实行动作a’,而是通过观察来获得s’状态下的动作的最大价值。因此属于off-policy的方法。
Q-learning具体算法流程如下:
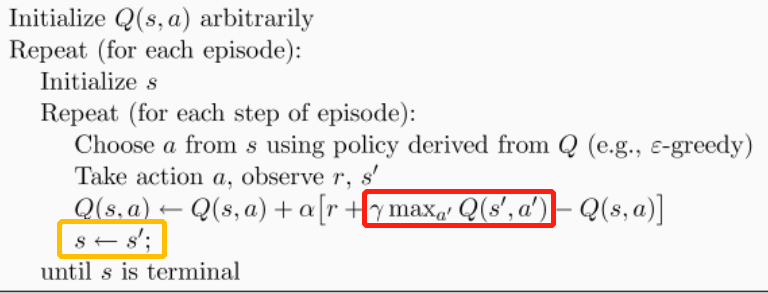
红色框中是观察到的
m
a
x
[
Q
(
s
′
,
a
′
)
max[Q(s',a')
max[Q(s′,a′),从黄色框中可以看到状态变为s’带如下次循环中后,并未指定执行动作a’,因此属于off-policy。
二、Q-learning Agent代码
此处直接参考莫烦python的强化学习教程进行代码编写,在基础上说明每一行代码的用途
对于环境environment的编写,仍沿用上一节中的环境environment
下面是对agent的编写和注释
from maze_env import Maze
import numpy as np
import pandas as pd
import tensorflow as tf
#RL的父类定义
class RL(object):
#初始化
#actions为可选动作, learning_rate为学习率,reward_decay为传递奖励是的递减系数gamma,1-e_greed为随机选择其他动作的概率
def __init__(self, actions, learning_rate=0.01, reward_decay=0.9, e_greedy=0.9):
self.actions = actions
self.lr = learning_rate
self.gamma = reward_decay
self.epsilon = e_greedy
#初始化qtable,行为observation的state, 列为当前状态可以选择的action(对于所有列,可以选择的action一样)
self.q_table = pd.DataFrame(columns = self.actions, dtype=np.float64)
def choose_action(self, observation):
self.check_state_exist(observation) #检查当前状态是否存在,不存在就添加这个状态
if np.random.uniform() < self.epsilon:
state_action = self.q_table.loc[observation, :] #找到当前状态可以选择的动作
#由于初始化或更新后一个状态下的动作值可能是相同的,为了避免每次都选择相同动作,用random.choice在值最大的action中损及选择一个
action = np.random.choice(state_action[state_action==np.max(state_action)].index)
else:
action = np.random.choice(self.actions) #0.1的几率随机选择动作
return action
def check_state_exist(self, state):
if state not in self.q_table.index:
#若找不到该obversation的转态,则添加该状态到新的qtable
#新的state的动作的q初始值赋值为0,列名为dataframe的列名,index为state
self.q_table = self.q_table.append(pd.Series([0]*len(self.actions), index=self.q_table.columns, name=state))
#不同方式的学习方法不同,用可变参数,直接pass
def learning(self, *args):
pass
#QLearning继承RL
class QLearningTable(RL):
#初始化
#参数自己定义,含义继承父类RL
#类方法choose_action、check_state_exist自动继承RL,参数不变
def __init__(self, actions, learning_rate=0.01, reward_decay=0.9, e_greedy=0.9):
super(QLearningTable, self).__init__(actions, learning_rate, reward_decay, e_greedy)
#根绝当前观察状态s,选择动作a,选择动作后的奖励r,和执行动作后的状态s_,来更新qtable
def learning(self, s, a,r, s_):
self.check_state_exist(s_) #检查动作后状态s_是否存在
q_old = self.q_table.loc[s, a] #旧的q[s,a]值
if s_!='terminal':
#下个状态下最大的值
max_s_ = self.q_table.loc[s_, :].max()
q_new = r+self.gamma*max_s_ #计算新的值
else:
q_new = r
self.q_table.loc[s,a] = q_old - self.lr*(q_new - q_old) #根据更新公式更新,类似于梯度下降
def update():
for episode in range(100):
# 初始化 state 的观测值
observation = env.reset() #每轮训练都要初始化观测值,即回到原点状态
while True:
env.render()
# RL 大脑根据 state 的观测值挑选 action
action = RL.choose_action(str(observation)) #qlearning采用greeed方法,选择q值最大的action
# 探索者在环境中实施这个 action, 并得到环境返回的下一个 state 观测值, reward 和 done (是否是掉下地狱或者升上天堂)
#是根据当前选择动作,观察到的采取动作后的状态和奖励
observation_,reward,done = env.step(action)
# RL 从这个序列 (state, action, reward, state_) 中学习
#根绝旧observation的q值,和采取动作,以及奖励和采取动作后的observation_的最大q值进行更新
RL.learning(str(observation), action, reward, str(observation_))
# 将下一个 state 的值传到下一次循环
observation = observation_
if done:
break
# 结束游戏并关闭窗口
print('game over')
env.destroy()
if __name__ == "__main__":
# 定义环境 env 和 RL 方式
env = Maze()
RL = QLearningTable(actions=list(range(env.n_actions)))
# 开始可视化环境 env
env.after(100, update)
env.mainloop()
最后
以上就是落后星星最近收集整理的关于强化学习笔记+代码(三):Q-learning算法原理和Agent实现的全部内容,更多相关强化学习笔记+代码(三)内容请搜索靠谱客的其他文章。








发表评论 取消回复