Section 1 VIO 概述
VIO:(Visual-Inertial Odometry)以视觉与 IMU 融合实现里程计
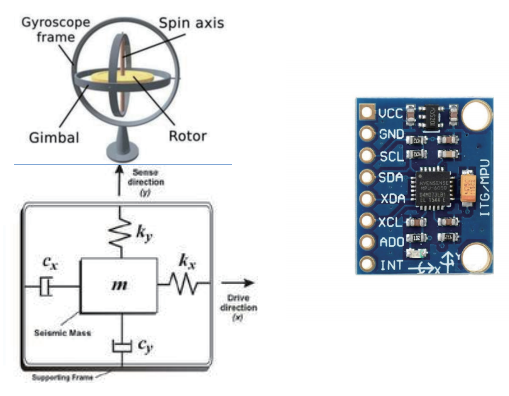
IMU(Inertial Measurement Unit),惯性测量单元
- 典型 6 轴 IMU 以较高频率(≥ 100Hz)返回被测量物体的角速度与加速度。高频率运动。
- 受自身温度、零偏、振动等因素干扰,积分得到的平移和旋转容易漂移。可通过标定去除干扰。
六自由度 IMU 本身由一个陀螺仪和一个加速度计组成,分别测量自身的角速度和加速度。
视觉 Visual Odometry
- 以图像形式记录数据,频率较低(15 60Hz 居多)
- 通过图像特征点或像素推断相机运动
整体上,视觉和 IMU 定位方案存在一定互补性质:
- IMU 适合计算短时间、快速的运动;
- 视觉适合计算长时间、慢速的运动。
同时,可利用视觉定位信息来估计 IMU 的零偏,减少 IMU 由零偏导致的发散和累积误差;
反之,IMU 可以为视觉提供快速运动时的定位。
Section 2 旋转运动学
线速度与角速度
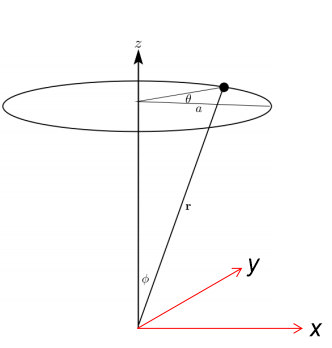
粒子在坐标系中
z
=
h
z = h
z=h中的平面做圆周运动,其中
a
a
a为运动半径,则坐标为:
r
=
(
a
c
o
s
θ
,
a
s
i
n
θ
,
h
)
T
r = (a cos θ, a sin θ, h)^T
r=(acosθ,asinθ,h)T对坐标求导得:
r
ˊ
=
(
−
a
θ
ˊ
s
i
n
θ
,
a
θ
ˊ
c
o
s
θ
,
0
)
T
acute{r}=(-aacute{theta} sintheta,aacute{theta} costheta,0)^T
rˊ=(−aθˊsinθ,aθˊcosθ,0)T
=
[
0
−
θ
ˊ
0
θ
ˊ
0
0
0
0
0
]
[
a
c
o
s
θ
a
s
i
n
θ
h
]
=
ω
×
r
= begin{bmatrix} 0 & -acute{theta} & 0 \ acute{theta} & 0 & 0\ 0&0&0 \ end{bmatrix} begin{bmatrix} acostheta \ asintheta\ h \ end{bmatrix} =omega times r
=⎣⎡0θˊ0−θˊ00000⎦⎤⎣⎡acosθasinθh⎦⎤=ω×r
ω
omega
ω为反对称矩阵,因此
ω
omega
ω矢量为
[
0
,
0
,
θ
ˊ
]
T
[0,0,acute{theta}]^T
[0,0,θˊ]T,其中,
ω
=
θ
ˊ
z
omega=acute{theta}z
ω=θˊz,
∣
θ
ˊ
∣
|acute{theta}|
∣θˊ∣是角速度大小。对上式取模,得:
∣
r
ˊ
∣
=
∣
ω
∣
∣
r
∣
s
i
n
ϕ
=
∣
ω
∣
a
=
a
∣
θ
ˊ
∣
|acute{r}|=|omega||r|sinphi=|omega|a=a|acute{theta}|
∣rˊ∣=∣ω∣∣r∣sinϕ=∣ω∣a=a∣θˊ∣
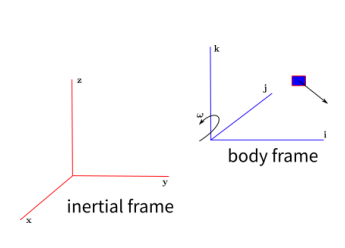
旋转坐标系下的运动学
质量块在 body 坐标系下的坐标为:
r
B
=
(
x
1
,
x
2
,
x
3
)
T
r_B = (x1, x2, x3)^T
rB=(x1,x2,x3)T,旋转到惯性系下有:
r
I
(
t
)
=
x
1
(
t
)
i
+
x
2
(
t
)
j
+
x
3
(
t
)
k
=
R
I
B
r
B
r_I (t) = x_1(t)i + x_2(t)j + x_3(t)k = R_{IB}r_B
rI(t)=x1(t)i+x2(t)j+x3(t)k=RIBrB其中,body frame在惯性坐标系下的表示为
(
i
,
j
,
k
)
(i,j,k)
(i,j,k)
对时间求导有:
r
ˊ
I
=
R
I
B
r
ˊ
B
+
R
ˊ
I
B
r
B
acute{r}_I = R_{IB}acute{r}_B + acute{R}_{IB}r{B}
rˊI=RIBrˊB+RˊIBrB
=
R
I
B
r
ˊ
B
+
[
R
I
B
ω
b
]
×
r
I
= R_{IB} acute{r}_B + [R_{IB}ω_b]×r_I
=RIBrˊB+[RIBωb]×rI
=
R
I
B
v
B
+
ω
×
r
I
= R_{IB}v_B + ω × r_I
=RIBvB+ω×rI
v
I
≡
R
I
B
v
B
+
ω
×
r
I
⇔
R
I
B
v
B
≡
v
I
−
ω
×
r
I
v_I ≡ R_{IB}v_B + ω × r_I ⇔ R_{IB}v_B ≡ v_I - ω × r_I
vI≡RIBvB+ω×rI⇔RIBvB≡vI−ω×rI其中
ω
=
R
I
B
ω
B
ω=R_{IB}ω_B
ω=RIBωB表示body坐标系的角速度在惯性坐标系下的表示。
Section 3 IMU 误差模型
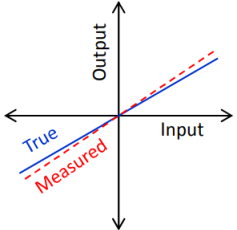
确定性误差
理论上,当没有外部作用时,IMU 传感器的输出应该为 0。但是,实际数据存在一个偏置 b。加速度计 bias 对位姿估计的影响:
v
e
r
r
=
b
a
t
,
p
e
r
r
(
平
移
)
=
1
2
b
a
t
2
v_{err} = b_at, p_{err}(平移) = {1 over 2}b_at^2
verr=bat,perr(平移)=21bat2
scale 可以看成是实际数值和传感器输出值之间的比值。
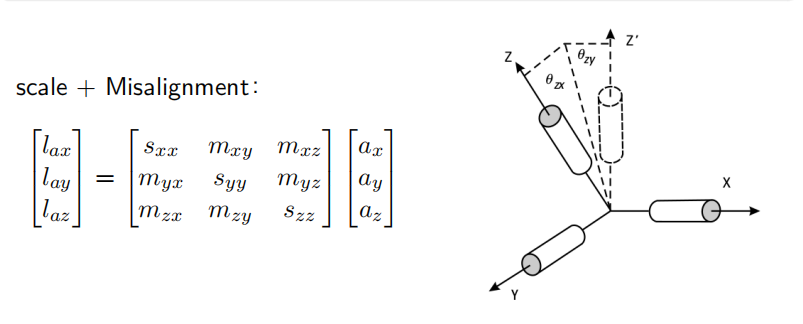
Nonorthogonality/Misalignment Errors
多轴 IMU 传感器制作的时候,由于制作工艺的问题,会使得 xyz 轴可能不垂直,如下图所示:
六面法标定加速度
六面法是指将加速度计的 3 个轴分别朝上或者朝下水平放置一段时间,采集 6 个面的数据完成标定。如果各个轴都是正交的,那很容易得到 bias 和 scale:
l
=
S
a
+
b
l=Sa+b
l=Sa+b
b
=
l
f
u
p
+
l
f
d
o
w
n
2
,
S
=
l
f
u
p
−
l
f
d
o
w
n
2
g
b={l_f^{up}+l_f^{down}over 2} , S={l_f^{up}-l_f^{down} over 2g}
b=2lfup+lfdown,S=2glfup−lfdown其中,l 为加速度计某个轴的测量值,g 为当地的重力加速度。
当各个轴不正交时,即考虑轴间误差的时候,实际加速度和测量值之间的关系为:
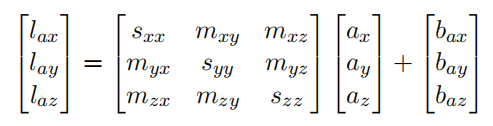
同理水平静止放置 6 面,利用最小二乘就能够把 12 个变量求出来。
六面法标定陀螺仪
bias 和 scale factor,和加速度计六面法不同的是,陀螺仪的真实值由高精度转台提供,这里的 6 面是指各个轴顺时针和逆时针旋转。
温度相关的参数标定
目的:这个标定的主要目的是对传感器估计的 bias 和 scale 进行温度补偿,获取不同温度时 bias 和 scale 的值,绘制成曲线。
两种标定方法:
- soak method: 控制恒温室的温度值,然后读取传感器数值进行标定。
- ramp method:记录一段时间内线性升温和降温时传感器的数据来进行标定。
Section 4 基于 Bundle Adjustment 的 VIO 融合
视觉 SLAM 里的 Bundle Adjustment 问题
已知:
- 状态量初始值:特征点的三维坐标,相机的位姿。
- 系统测量值:特征点在不同图像上的图像坐标。
解决方式:
构建误差函数,利用最小二乘得到状态量的最优估计
最后
以上就是愉快小蝴蝶最近收集整理的关于VIO的IMU旋转运动学与误差模型和标定的全部内容,更多相关VIO内容请搜索靠谱客的其他文章。








发表评论 取消回复