问题背景
本文研究的是无人驾驶场景中的语义分割问题。语义分割的样本标记成本很高,使用合成数据能帮助解决样本不足问题。但是合成的数据和真实的数据之间存在差异,这种差异会极大影响使用合成数据训练的模型在真实数据上的表现。
本文研究难点在于如何处理合成数据和真实数据之间的差异,该问题存在两方面原因:
其实以上两点说的是一点,只不过从两个角度说,这两点分别对应本文设计的两个子模型。
解决思路
本文的主要贡献在于提出了两个网络策略,用于处理语义分割任务中使用合成数据训练的域适配问题。
为了避免模型对合成数据的过拟合,本文使用 Target Guided Distillation Module,让模型模仿真实图片的训练的特征。
为了解决数据分布不一的问题,使用 Spatial-aware Adaption Module,充分考虑两种数据在空间分布上的差异,使得模型在两种数据上能够得到相似的特征。
论文模型
1. Target Guided Distillation
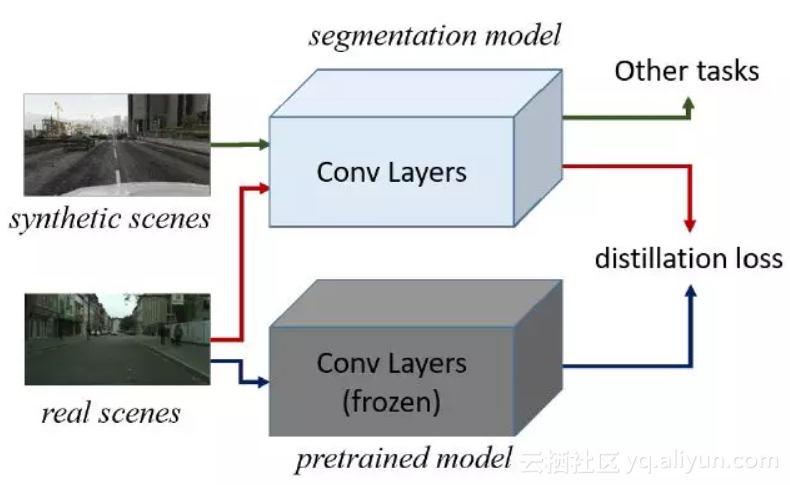
用 ImageNet 训练好的特征提取网络(图中灰色部分)作为 target,让分割模型提取的特征尽可能的像 target 提取的特征,distillation loss 采用欧拉距离计算方法。训练的时候,当输入是真实图片,计算 distillation loss;当输入是合成图片,输出分割的损失。
2. Spatial-Aware Adaption
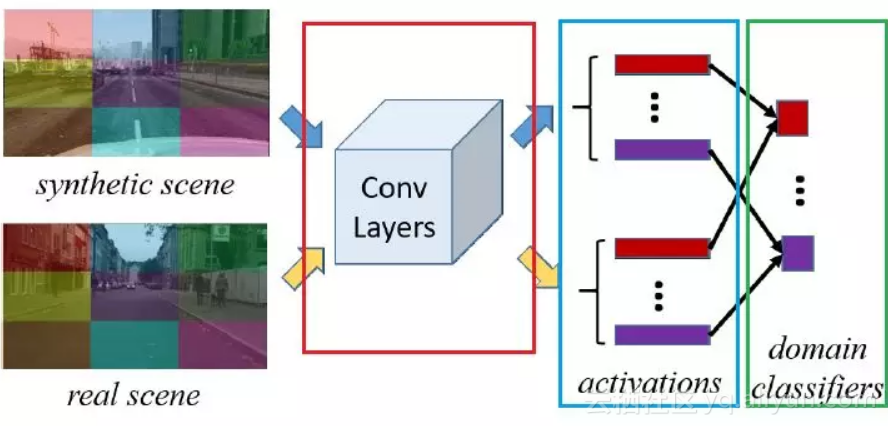
使用 max-min loss(对抗训练)的方式完成适配(domain distribution adaption)任务。适配任务的目的是,让特征提取网络,对不同分布域的数据,提取到类似的特征,而不影响后续的任务处理。
该问题的关键在于“类似的特征”如何表达。来自不同分布域的数据,内容存在差异,肯定无法直接用 mseloss 这种形式的损失来处理,所以,使用判别器损失,是比较合适的。
图中绿色框中的 domain classifier 就是这个判别器。红框同时也是上上图中分割网络所使用的卷积特征提取网络,而中间的蓝色框,表示的是标题中的“Spatial-Aware”,也就是把对用整张图的特征,分成 3x3 个区域,分别对每个区域计算判别损失。
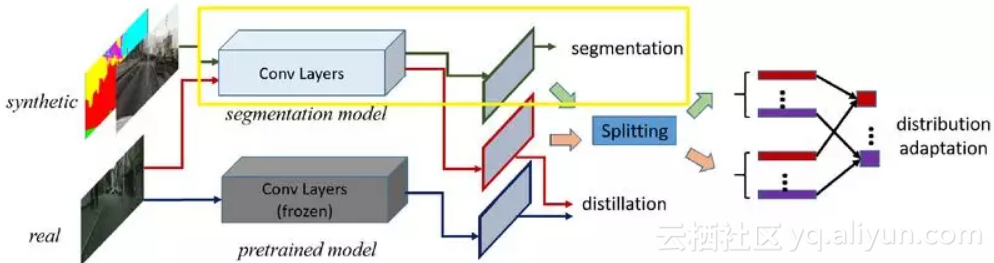
3. 整个模型
整个网络连起来,如下图所示。测试的时候,只使用用图中黄色框的部分。
实验
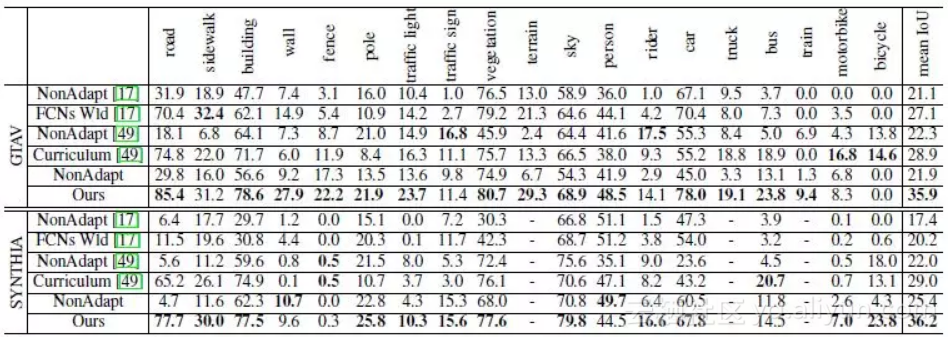
真实数据集 Cityscapes [1],合成数据集 GTAV [2],分割网络使用 PSPnet 和 Deeplab。其中,Cityscapes 仅使用图片,未使用标签(本文要处理的是尽可能不使用人工标记的样本)。
训练时,一个 batch 中有 10 张图片,5 张来自 Cityscapes,5 张来自 GTAV。使用真实图片进行测试,计算 mIOU,实验结果如下。
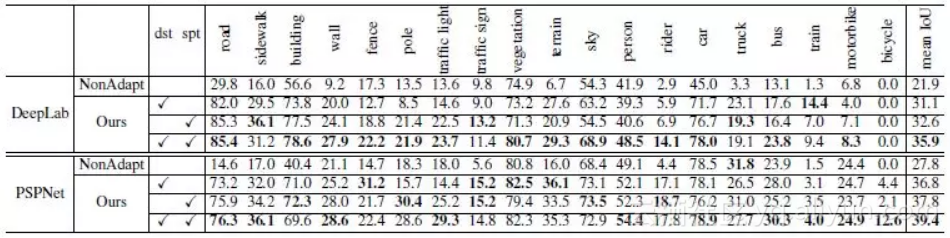
适配能提升 14 个百分点,但是相比于使用人工标记的训练结果 [3],还是要差很多很多。
本文提出的适配方法,相比于其他适配方法,效果也是最好的。
评价
本文研究的问题(使用合成数据减少对人工标注数据的依赖)很有实际意义,但是目前的效果还是差一些,似乎只能充当 boosting,离目标还有一段距离。很多视觉任务,都可以尝试这种方法,以减少对实际标注样本量的需求。
另外,是否可以研究,在使用合成数据的情况下,检测结果(在真实数据下测试的指标)随真实标记样本量的变化情况,定性地了解,到底合成数据能在多大程度上,减少手工标注量。比如,可能画出如下曲线:
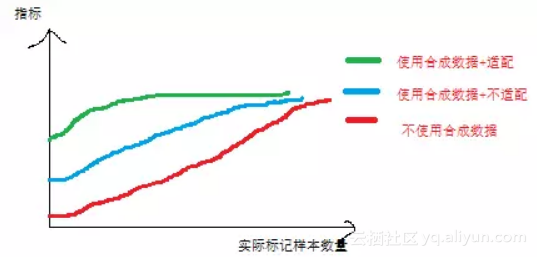
如果能做到这个地步,那在实际应用中,使用合成数据进行训练这种方法,可能会广泛使用,毕竟目前还仅仅停留在学术论文的地步。
最后
以上就是时尚冬日最近收集整理的关于ETH Zurich提出新型网络「ROAD-Net」,解决语义分割域适配问题的全部内容,更多相关ETH内容请搜索靠谱客的其他文章。








发表评论 取消回复