当初是这样选中课设这样一个题目的,看到有关于Python这样的题目(基于Python的数据采集器),就很想报,刚好同学找的我,想和我一起组个队一起搞毕设,所以我就说要不我们一起报这个(基于Python的数据采集器)题目,后来一拍而成,就妥妥的报了这个课题。所以才有了后来一系列的学习的文章,还有现在这篇文章,基本上在这个项目当中,我是一个技术指导者吧(也没那么牛逼啦,只是我可能比他们早接触编程吧,比我队友懂多了一点吧,我实在是很垃圾啦)。
首先我们决定使用的是一个小车搭载一个摄像头进行识别,最后添加了温湿度提取显示在页面上。
我们使用的是树莓派这款片上系统编程,驱动小车运动,摄像头识别,温度传感器dht22提取温湿度。
首先我们使用Python这样的一个bottle框架来搭建我们的后台服务器,接下来我们来看看他们的基本用法
第一步当然是安装
$ wget http://bottlepy.org/bottle.py
当然如果有安装Python 直接推荐如下安装方法
$ sudo pip install bottle # recommended
$ sudo easy_install bottle # alternative without pip
$ sudo apt-get install python-bottle # works for debian, ubuntu, ...
windows安装
无论哪种方式, 您都需要安装好 2.5以上 (包含3.x)来运行 bottle 应用. 如果您没有权限在整个系统中安装这些包或者根本不想这么做,那可以先创建 virtualenv :
$ virtualenv develop # Create virtual environment
$ source develop/bin/activate # Change default python to virtual one
(develop)$ pip install -U bottle # Install bottle to virtual environment
如果您没有安装virtualenv ,可以通过以下方式安装:
$ wget https://raw.github.com/pypa/virtualenv/master/virtualenv.py
$ python virtualenv.py develop # Create virtual environment
$ source develop/bin/activate # Change default python to virtual one
(develop)$ pip install -U bottle # Install bottle to virtual environment
快速入门: “HELLO WORLD”
from bottle import route, run
@route('/hello')
def hello():
return "Hello World!"
run(host='localhost', port=8080, debug=True)

代码很简单,运行这个脚本,访问 http://localhost:8080/hello 您可以在浏览器中看到 “Hello World!” 。 它的运行原理如下:
route() 装饰器为URL地址绑定了一段代码,在这个例子中,我们关联了/hello 地址到 hello() 函数上。 这个叫route的(装饰器的名字) 是Bottle框架的最重要的概念。您可以定义任意多个 route。当浏览器请求一个URL地址,它所关联的函数就会被调用并返回相应的值给浏览器,原理比较简单。
最后一行调用 run() 方法启动一个内置的开发环境用的服务器,运行在 localhost 8080 端口来为请求提供服务,可以按 Control-c来关闭它。以后你切换使用其他服务器,不过目前使用这个内置服务器就够用了,它不需要任何配置,并且以难以置信的无侵害方式使您的应用运行并且用于本地测试。
默认应用
为了简单起见,本教程中的例子都使用module-level route()装饰器来定义route. 它会将这些routes添加到一个全局的 “默认应用”,它是一个Bottle 的实例,当第一次调用 route()时候会自动创建。有很多其他的 module-level 装饰器和函数与默认应用相关,但是如果您喜欢更面向对象的方法和不介意额外的输入,您可以创建一个单独的应用程序对象,而不是使用全局的默认应用:
from bottle import Bottle, run
app = Bottle()
@app.route('/hello')
def hello():
return "Hello World!"
run(app, host='localhost', port=8080)
请求路由
@route('/hello')
def hello():
return "Hello World!"
route() 装饰器关联了一个URL 地址到一个回调函数,并添加了一个新的 route 到默认应用( default application),一个应用只有一个路由太单调了,因此,我们增加一些 (不要忘记 from bottle import template):
@route('/')
@route('/hello/<name>')
def greet(name='Stranger'):
return template('Hello {{name}}, how are you?', name=name)
动态路由
包含通配符的Route称为动态路由 (对比于静态路由) ,可以同时匹配不止一个 URL地址。一个简单的通配符由一个名称和一对中括号组成 (例如 ) ,接受下一个斜杠(/)前一个多多个字母。例如 路由/hello/ 接受请求/hello/alice和 /hello/bob,但不接受 /hello, /hello/ 或者/hello/mr/smith.
每一个通配符将覆盖URL的一部分作为一个关键字参数,用于请求的回调函数。您可以使用它们轻松地实现基于RESTful的、代码整洁友好的、有意义的url。这里有一些其他的例子,展示他们匹配的url:
@route('/wiki/<pagename>') # matches /wiki/Learning_Python
def show_wiki_page(pagename):
...
@route('/<action>/<user>') # matches /follow/defnull
def user_api(action, user):
...
0.10 版本后的新特性.
使用过滤器是用来定义更具体的通配符,并且/或者 在传递给回调函数之前对参数进行转换。一个过滤通配符声明为name:filter orname:filter:config。可选配置部分的语法取决于所使用的过滤器。
以下是默认实现的过滤器,以后可能会增加更多:
:int matches (signed) digits only and converts the value to integer.
:float similar to :int but for decimal numbers.
:path matches all characters including the slash character in a non-greedy way and can be used to match more than one path segment.
:re allows you to specify a custom regular expression in the config field. The matched value is not modified.
让我们来看看一些实际的例子:
@route('/object/<id:int>')
def callback(id):
assert isinstance(id, int)
@route('/show/<name:re:[a-z]+>')
def callback(name):
assert name.isalpha()
@route('/static/<path:path>')
def callback(path):
return static_file(path, ...)
您可以实现定制的过滤器,细节请参考 Request Routing .
0.10版本更新.
Bottle 0.10中引入的新规则语法,用来简化一些常见的用例,但是老语法仍然有效,你可以找到很多示例代码还使用它。下面例子描述了他们的差异:
Old Syntax New Syntax
:name <name>
:name#regexp# <name:re:regexp>
:#regexp# <:re:regexp>
:## <:re>
在未来的项目中尽量避免使用旧语法,它目前还能使用,但最终会被弃用。
HTTP请求方法
HTTP协议定义了多种请求方法(request methods ,有时被称作“verbs”) 来实现不同的任务。当没有指定方法时,所有的routes路由都默认使用GET方法,这些路由只能匹配GET请求。如果要处理其他的请求如 POST, PUT, DELETE 或者 PATCH, 给route() 增加一个 method 关键字参数,或者使用四个替代装饰器: get(), post(), put(), delete() 或patch().
POST方法通常用于 HTML 表单的提交,下面例子展示了如何使用POST处理一个登录表单:
from bottle import get, post, request # or route
@get('/login') # or @route('/login')
def login():
return '''
<form action="/login" method="post">
Username: <input name="username" type="text" />
Password: <input name="password" type="password" />
<input value="Login" type="submit" />
</form>
'''
@post('/login') # or @route('/login', method='POST')
def do_login():
username = request.forms.get('username')
password = request.forms.get('password')
if check_login(username, password):
return "<p>Your login information was correct.</p>"
else:
return "<p>Login failed.</p>"
ok,这个小车大概就用到这样的一些用法吧,其他可以访问下面这个博客的链接
bottle 博客教程
1 小车行动的程序
主要界面分为前进,后退,左转,右转,停止,五大功能
前台界面使用 bootstrap 布局简单的界面
前台主要代码如下:
<!DOCTYPE html>
<html lang="en">
<head>
<meta charset="UTF-8">
<meta name="viewport" content="width=device-width, initial-scale=1.0">
<title>遥控树莓派</title>
<link rel="stylesheet" href="https://cdn.jsdelivr.net/npm/bootstrap@3.3.7/dist/css/bootstrap.min.css" integrity="sha384-BVYiiSIFeK1dGmJRAkycuHAHRg32OmUcww7on3RYdg4Va+PmSTsz/K68vbdEjh4u" crossorigin="anonymous">
<script src="http://code.jquery.com/jquery.js"></script>
<style type="text/css">
#go {
margin-left: 55px;
margin-bottom: 3px;
}
#back {
margin-top: 3px;
margin-left: 55px;
}
.servo {
width: 200px;
height: 200px;
margin-top: 50px;
}
</style>
</head>
<body>
<div id="container" class="container">
<div>
<button id="go" class="btn btn-lg btn-primary glyphicon glyphicon-circle-arrow-up"></button>
</div>
<div>
<button id='left' class="btn btn-lg btn-primary glyphicon glyphicon-circle-arrow-left"></button>
<button id='stop' class="btn btn-lg btn-primary glyphicon glyphicon-stop"></button>
<button id='right' class="btn btn-lg btn-primary glyphicon glyphicon-circle-arrow-right"></button>
</div>
<div>
<button id='back' class="btn btn-lg btn-primary glyphicon glyphicon-circle-arrow-down"></button>
</div>
</div>
<div class="servo">
<div>
<input type="range" id="upd" name="updown" min="10" max="150" step="20">
<label for="upd">左/右</label>
</div>
<div>
<input type="range" id="leftr" name="leftright" min="50" max="150" step="20">
<label for="leftr">上/下</label>
</div>
</div>
<script src="https://cdn.jsdelivr.net/npm/bootstrap@3.3.7/dist/js/bootstrap.min.js" integrity="sha384-Tc5IQib027qvyjSMfHjOMaLkfuWVxZxUPnCJA7l2mCWNIpG9mGCD8wGNIcPD7Txa" crossorigin="anonymous"></script>
<script>
var flag=true;
$(function(){
$("button").click(function(){
//cmd="{cmd:"+this.id+"}"
//alert(cmd)
$.post("/cmd",this.id,function(data,status){
});
});
});
$(document).keydown(function(event){
if(flag){
if(event.keyCode==38){
$.post("/cmd","go",function(data,status){
console.log("hello");
flag=false;
console.log(flag);
});
}else if(event.keyCode == 40){
$.post("/cmd","back",function(data,status){
flag=false;
});
}else if(event.keyCode == 37){
$.post("/cmd","left",function(data,status){
flag=false;
});
}else if(event.keyCode == 39){
$.post("/cmd","right",function(data,status){
flag=false;
});
}else{
alert("hello");
}
}
});
$(document).keyup(function(event){
if(event.keyCode==38){
$.post("/cmd","stop",function(data,status){
flag=true;
});
}else if(event.keyCode == 40){
$.post("/cmd","stop",function(data,status){
flag=true;
});
}else if(event.keyCode == 37){
$.post("/cmd","stop",function(data,status){
flag=true;
});
}else if(event.keyCode == 39){
$.post("/cmd","stop",function(data,status){
flag=true;
});
}else{
alert("hello");
}
});
$("#upd").on("input propertychange",function(){
$.post("/ser",{val: $("#upd").val(), flag:0},function(data,status){
console.log(data)
console.log(status)
});
console.log($("#upd").val());
}).on("mouseup",function(){
$.post("/ser",{val: $("#upd").val(), flag:1},function(data,status){
console.log(data)
console.log(status)
});
});
$("#leftr").on("input propertychange",function(){
$.post("/serud",{val: $("#leftr").val(), flag:0},function(data,status){
console.log(data)
console.log(status)
});
console.log($("#upd").val());
}).on("mouseup",function(){
$.post("/ser",{val: $("#leftr").val(), flag:1},function(data,status){
console.log(data)
console.log(status)
});
}); ;
</script>
</body>
</html>
车子的的电机驱动模块是L298N这个模块,
1 他的主电源正极为 12 V 电压
2 他主要有四个引脚分别为 IN1,IN2,IN3,IN4,这里我们链接在树莓派的11,12,13,15号引脚。
3 5V 输入我是从 2 号引脚拉出来的
4 通道A,B 用于连接电机的,有一个是正极输出,一个是负极输出。
接下来就是我们给小车的驱动代码
#!/usr/bin/env python3
# _*_ coding: utf-8 _*_
from bottle import get,post,run,request,template
#导入gpio的模块
import RPi.GPIO as GPIO
import time
#定义小车驱动引脚号
IN1 = 11
IN2 = 12
IN3 = 13
IN4 = 15
#定义引脚号
ServoPinlr = 23
ServoPinud = 26
#设置GPIO口为BOARD编码方式
GPIO.setmode(GPIO.BOARD)
#忽略警告信息
GPIO.setwarnings(False)
# 初始化摄像头的PWM波
def inits():
global pwm_servo1
global pwm_servo2
GPIO.setmode(GPIO.BOARD)
GPIO.setup(ServoPinlr, GPIO.OUT)
GPIO.setup(ServoPinud, GPIO.OUT)
#设置pwm引脚和频率为50hz
pwm_servo1 = GPIO.PWM(ServoPinud, 50)
pwm_servo2 = GPIO.PWM(ServoPinlr, 50)
pwm_servo1.start(0)
pwm_servo2.start(0)
inits()
# 控制摄像头左右转动
def servo_control1(pos):
# 设置PWM 波的占空比
pwm_servo1.ChangeDutyCycle(2.5 + 10 * pos/180)
# 控制摄像头上下转动
def servo_control2(pos):
# 设置PWM波的占空比
pwm_servo2.ChangeDutyCycle(2.5 + 10 * pos/180)
#设置GPIO口的输出方式
def init():
#设置gpio口的模式 注意
GPIO.setmode(GPIO.BOARD)
GPIO.setup(IN1,GPIO.OUT)
GPIO.setup(IN2,GPIO.OUT)
GPIO.setup(IN3,GPIO.OUT)
GPIO.setup(IN4,GPIO.OUT)
# 左转函数
def left():
GPIO.output(IN1,False)
GPIO.output(IN2,False)
GPIO.output(IN3,GPIO.HIGH)
GPIO.output(IN4,GPIO.LOW)
# 右转
def right():
GPIO.output(IN1,GPIO.HIGH)
GPIO.output(IN2,GPIO.LOW)
GPIO.output(IN3,False)
GPIO.output(IN4,False)
# 前进
def go():
GPIO.output(IN1,GPIO.HIGH)
GPIO.output(IN2,GPIO.LOW)
GPIO.output(IN3,GPIO.HIGH)
GPIO.output(IN4,GPIO.LOW)
# 后退
def back():
GPIO.output(IN1,GPIO.LOW)
GPIO.output(IN2,GPIO.HIGH)
GPIO.output(IN3,GPIO.LOW)
GPIO.output(IN4,GPIO.HIGH)
#GPIO.cleanup()#释放GPIO口
# 停止
def stop():
GPIO.output(IN1,GPIO.LOW)
GPIO.output(IN2,GPIO.LOW)
GPIO.output(IN3,GPIO.LOW)
GPIO.output(IN4,GPIO.LOW)
#GPIO.cleanup()#释放GPIO口
@get("/")
def index():
return template("index")
@post("/cmd")
def cmd():
# 在这里判断要判断前台的按键按下了那个按键
# 根据按键来响应哪些事件
# 获取前台按下按钮传过来的this.id
# 根据this.id判断执行那个函数
# 我猜测request对象应该有一个实例化方法可以查询前台post过来的字段的
# print("按下了按钮: "+request.body.read().decode())
init() # 初始化板和引脚
param = request.body.read().decode();
print(param)
if param == 'go':
go()
if param == 'back':
back()
if param == 'left':
left()
if param == 'right':
right()
if param == 'stop':
stop()
return "OK"
@post("/ser")
def ser():
try:#舵机left/right
#pos = request.body.read().decode();
pos = int(request.forms.get('val'))
flag = int(request.forms.get('flag'))
if not flag:
pwm_servo1.start(0)
servo_control1(pos)
print(pos)
else:
pwm_servo1.stop()
pwm_servo1.start(0)
except KeyboardInterrupt:
pass
#GPIO.cleanup()
@post("/serud")
def serud():
try:
pos = int(request.forms.get('val'))
flag = int(request.forms.get('flag'))
if not flag:
pwm_servo2.start(0)
servo_control2(pos)
print(pos)
else:
pwm_servo2.stop()
pwm_servo2.start(0)
except KeyboardInterrupt:
pass
#GPIO.cleanup()
run(host="0.0.0.0",port="1025")
小车完成驱动源码已经上传到git
树莓派小车源码
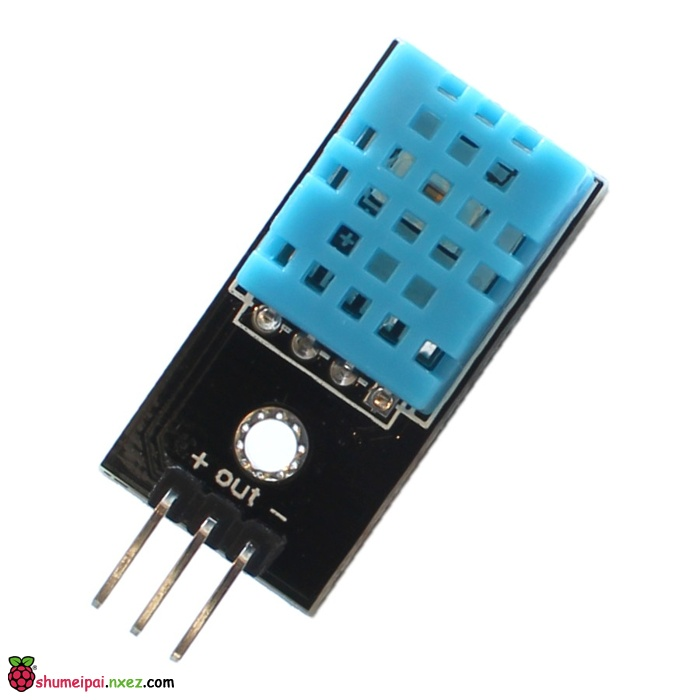
今天把dht22传感器 提取温湿度也完成了
DHT22 温湿度传感器尽管不是使用效率最高的温湿度传感器,但价格便宜被广泛应用。下面我们介绍另一种基于Adafruit DHT 库读取 DHT22 数据的方法。
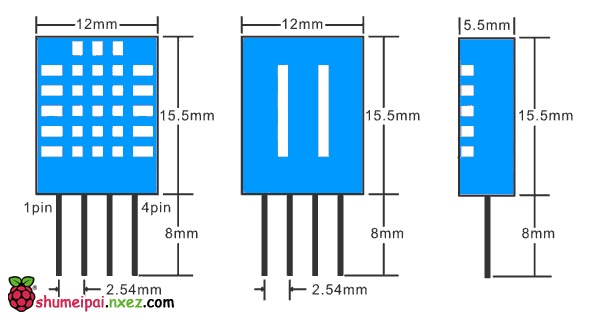
DHT22 规格
DHT22 有四个引脚,但是其中一个没有被使用到。所有有的模块会简化成3个引脚。
湿度检测范围 : 20-80% (5% 精度)
温度检测范围 : 0-50°C (±2°C 精度)
该厂商不建议读取频率小于2秒,如果这么做数据可能会有误。
硬件连接
需要在电源和数据脚之间串联一个上拉电阻(4.7K-10K),通常情况下,购买DHT11模块的话都自带了这个电阻。不同的模块型号引脚位置略有不同,下面以图上模块为说明:
DHT Pin Signal Pi Pin
1 3.3V 1
2 Data/Out 11 (GPIO17)
3 not used –
4 Ground 6 or 9
数据引脚可以根据你的需要自行修改。
Python 库
D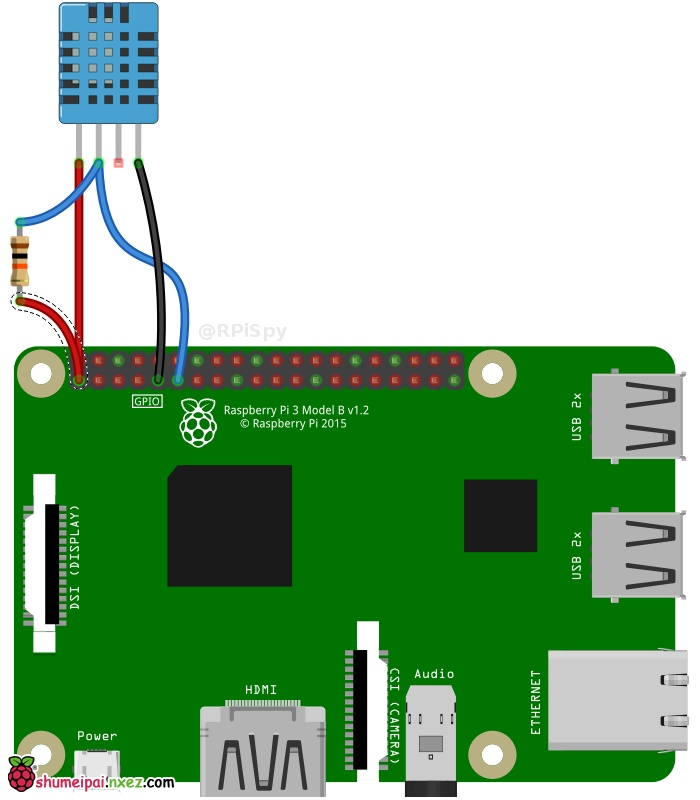
DHT22 的读取需要遵循特定的信号协议完成,为了方便我们使用Adafruit DHT 库。
软件安装
开始之前需要更新软件包:
sudo apt-get update
sudo apt-get install build-essential python-dev
从 GitHub 获取 Adafruit 库:
sudo git clone https://github.com/adafruit/Adafruit_Python_DHT.git
cd Adafruit_Python_DHT
给 Python 2 和 Python 3 安装该库:
sudo python setup.py install
sudo python3 setup.py install
Adafruit 提供了示例程序,运行下面的命令测试。
cd ~
cd Adafruit_Python_DHT
cd examples
python AdafruitDHT.py 11 17
这两个参数分别表示 DHT22 和数据引脚所接的树莓派 GPIO 编号。成功的话会输出:
Temp=22.0* Humidity=68.0%
如何在其他 Python 程序中使用这个库
参照下面的方法引入 Adafruit 库,然后就可以使用 “read_retry” 方法来读取 DHT11 的数据了:
import Adafruit_DHT
# Set sensor type : Options are DHT11,DHT22 or AM2302
sensor=Adafruit_DHT.DHT11
# Set GPIO sensor is connected to
gpio=17
# Use read_retry method. This will retry up to 15 times to
# get a sensor reading (waiting 2 seconds between each retry).
humidity, temperature = Adafruit_DHT.read_retry(sensor, gpio)
# Reading the DHT11 is very sensitive to timings and occasionally
# the Pi might fail to get a valid reading. So check if readings are valid.
if humidity is not None and temperature is not None:
print('Temp={0:0.1f}*C Humidity={1:0.1f}%'.format(temperature, humidity))
else:
print('Failed to get reading. Try again!')```
最终温湿度检测源码如下
dht22源码
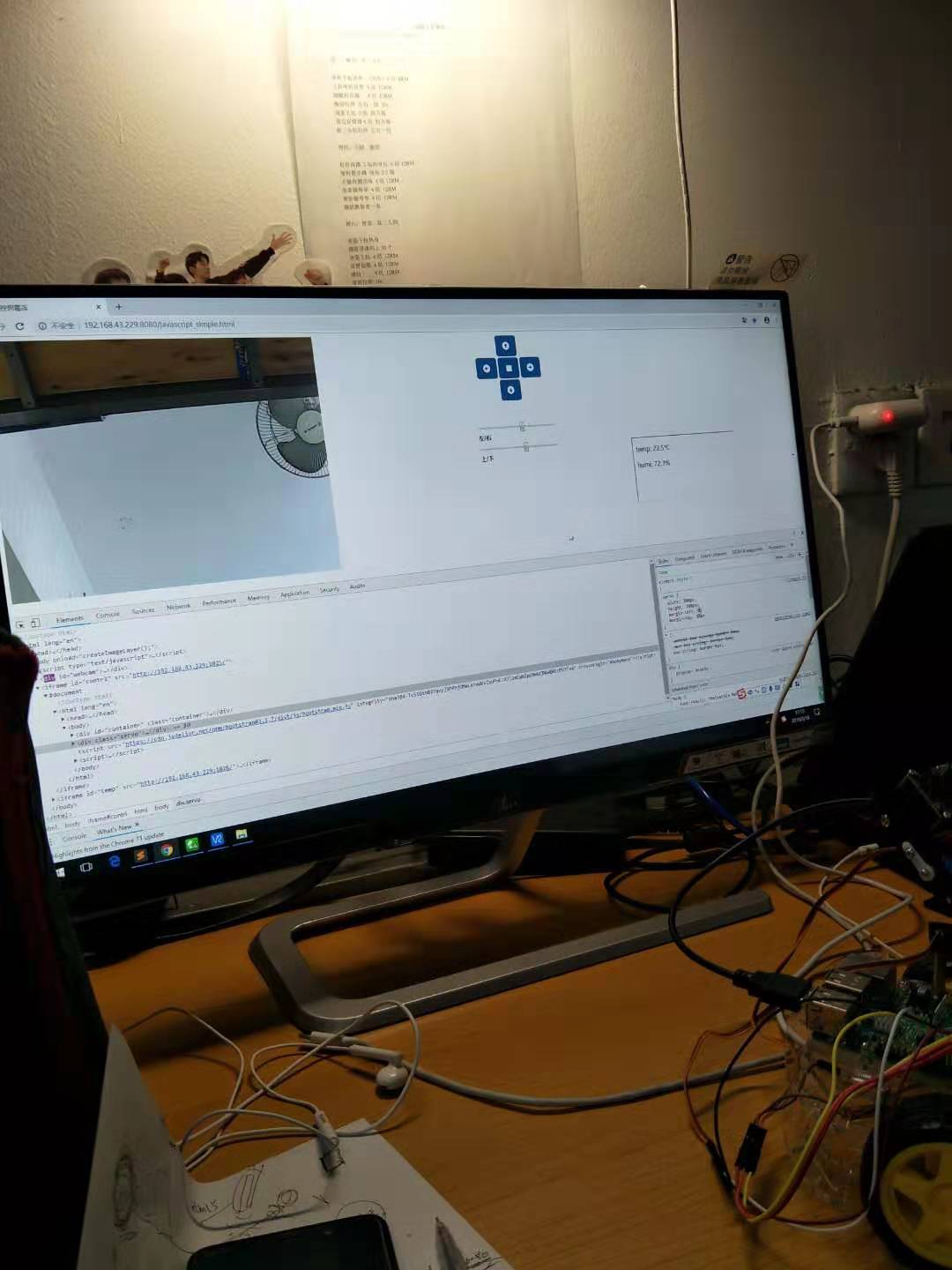
最终的界面如下,界面暂时样式还没有调整好,所以丑
最后
以上就是精明金针菇最近收集整理的关于毕设树莓派小车的全部内容,更多相关毕设树莓派小车内容请搜索靠谱客的其他文章。








发表评论 取消回复