本视觉机械臂为mearm机械臂,采用眼在手外,摄像头与机械臂原点140mm距离,且在正上方。
使用openmv检测颜色物料
采用img.find_blobs([green,red])函数进行检测
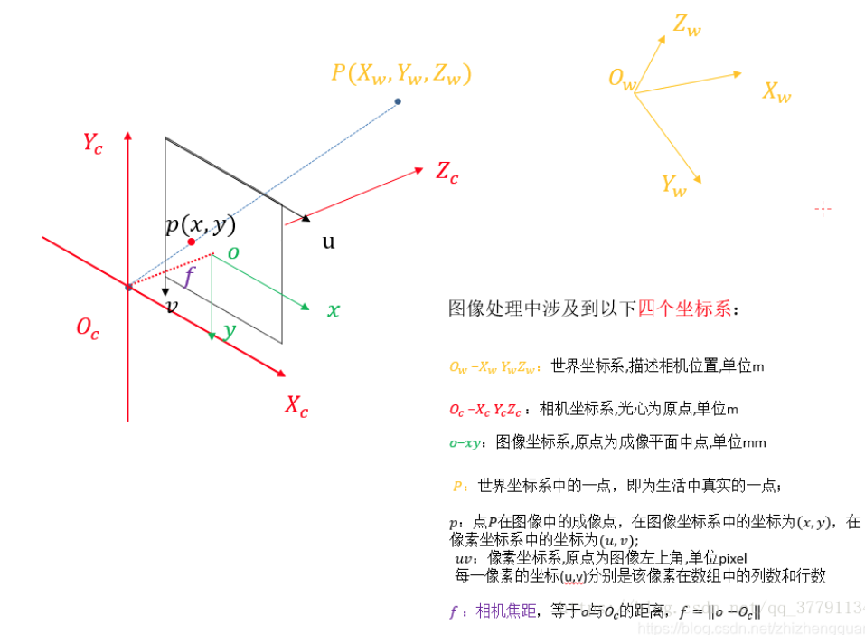
关于获得的像素坐标转化为相机坐标
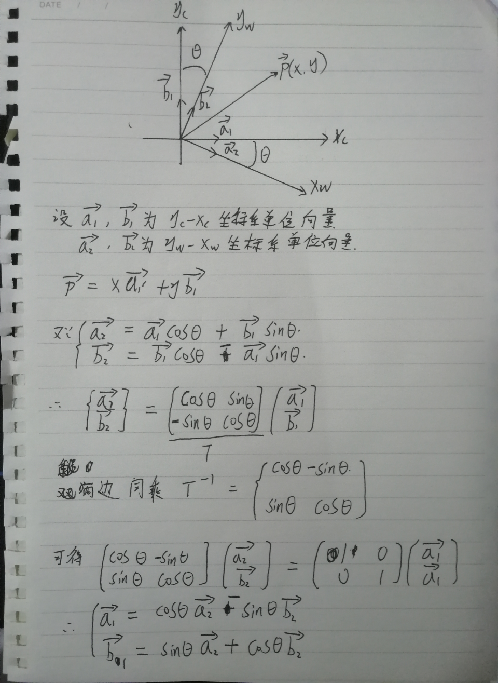
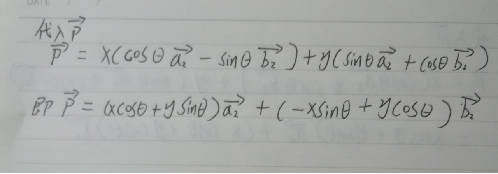
3.相机坐标转化为世界坐标
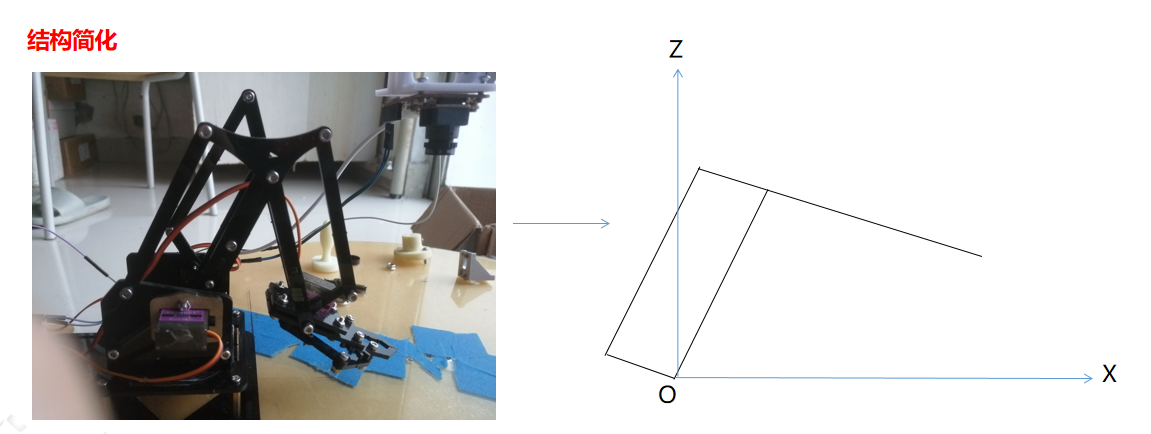
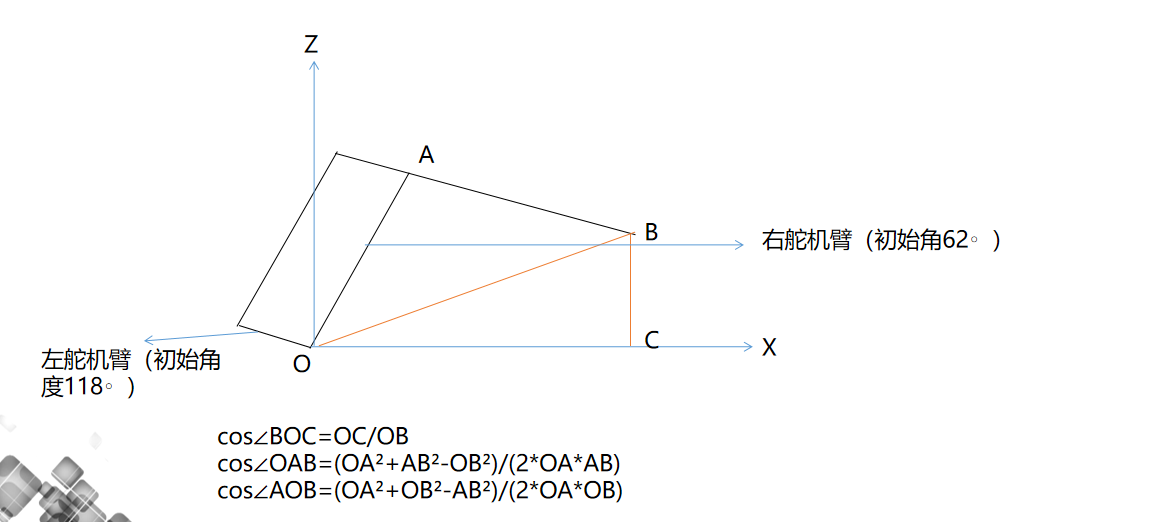
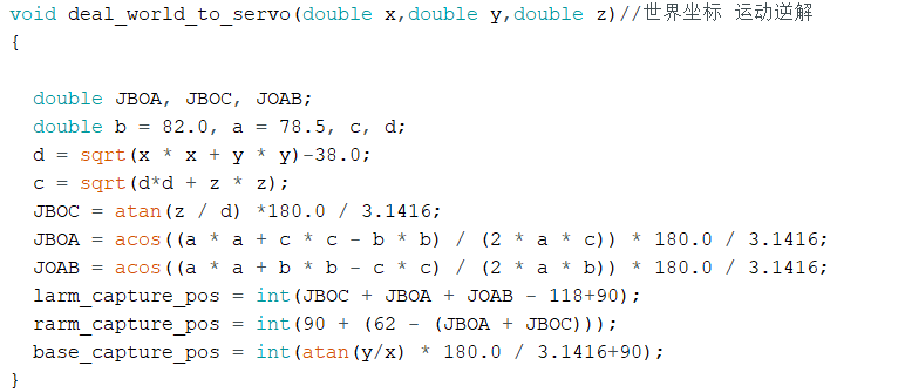
4.机械臂运动逆解
本结构采用mearm机械臂,下面为对其结构简化。
运动逆解相关部分代码
最后
以上就是能干月饼最近收集整理的关于基于arduino的视觉机械臂的研究的全部内容,更多相关基于arduino内容请搜索靠谱客的其他文章。
本图文内容来源于网友提供,作为学习参考使用,或来自网络收集整理,版权属于原作者所有。








发表评论 取消回复