将文件中 kinetic 部分替换为 noetic
按照 PA6.PDF 中进行运行
gaussian_newton.cpp
block 矩阵操作
块操作 构建动态大小子矩阵 提取块大小为(p,q),起始于(i,j) matrix.block(i,j,p,q)
第一段:76-100 lines
void CalcJacobianAndError(Eigen::Vector3d xi,Eigen::Vector3d xj,Eigen::Vector3d z,
Eigen::Vector3d& ei,Eigen::Matrix3d& Ai,Eigen::Matrix3d& Bi)
{
//TODO--Start
Eigen::Matrix2d RijT;
RijT << cos(z(2)),sin(z(2)),
-sin(z(2)),cos(z(2));
Eigen::Matrix2d RiT;
RiT << cos(xi(2)),sin(xi(2)),
-sin(xi(2)),cos(xi(2));
Eigen::Matrix2d dRiT;
dRiT << -sin(xi(2)), cos(xi(2)),
-cos(xi(2)),-sin(xi(2));
ei.block(0, 0, 2, 1) = RijT * (RiT * (xj.block(0, 0, 2, 1) - xi.block(0, 0, 2, 1)) - z.block(0, 0, 2, 1));
ei(2) = xj(2) - xi(2) - z(2);
if (ei(2) > M_PI)
ei(2) -= 2 * M_PI;
else if (ei(2) < -M_PI)
ei(2) += 2 * M_PI;
Ai.block(0, 0, 2, 2) = - RijT * RiT;
Ai.block(0, 2, 2, 1) = RijT * dRiT * (xj.block(0, 0, 2, 1) - xi.block(0, 0, 2, 1));
Ai.block(2, 0, 1, 3) << 0, 0, -1;
Bi.setIdentity();
Bi.block(0, 0, 2, 2) = RijT * RiT;
//TODO--end
} //TODO--Start
b.block(3*tmpEdge.xi, 0, 3, 1) += Ai.transpose() * infoMatrix * ei;
b.block(3*tmpEdge.xj, 0, 3, 1) += Bi.transpose() * infoMatrix * ei;
H.block(3*tmpEdge.xi, 3*tmpEdge.xi, 3, 3) += Ai.transpose() * infoMatrix * Ai;
H.block(3*tmpEdge.xi, 3*tmpEdge.xj, 3, 3) += Ai.transpose() * infoMatrix * Bi;
H.block(3*tmpEdge.xj, 3*tmpEdge.xi, 3, 3) += Bi.transpose() * infoMatrix * Ai;
H.block(3*tmpEdge.xj, 3*tmpEdge.xj, 3, 3) += Bi.transpose() * infoMatrix * Bi;
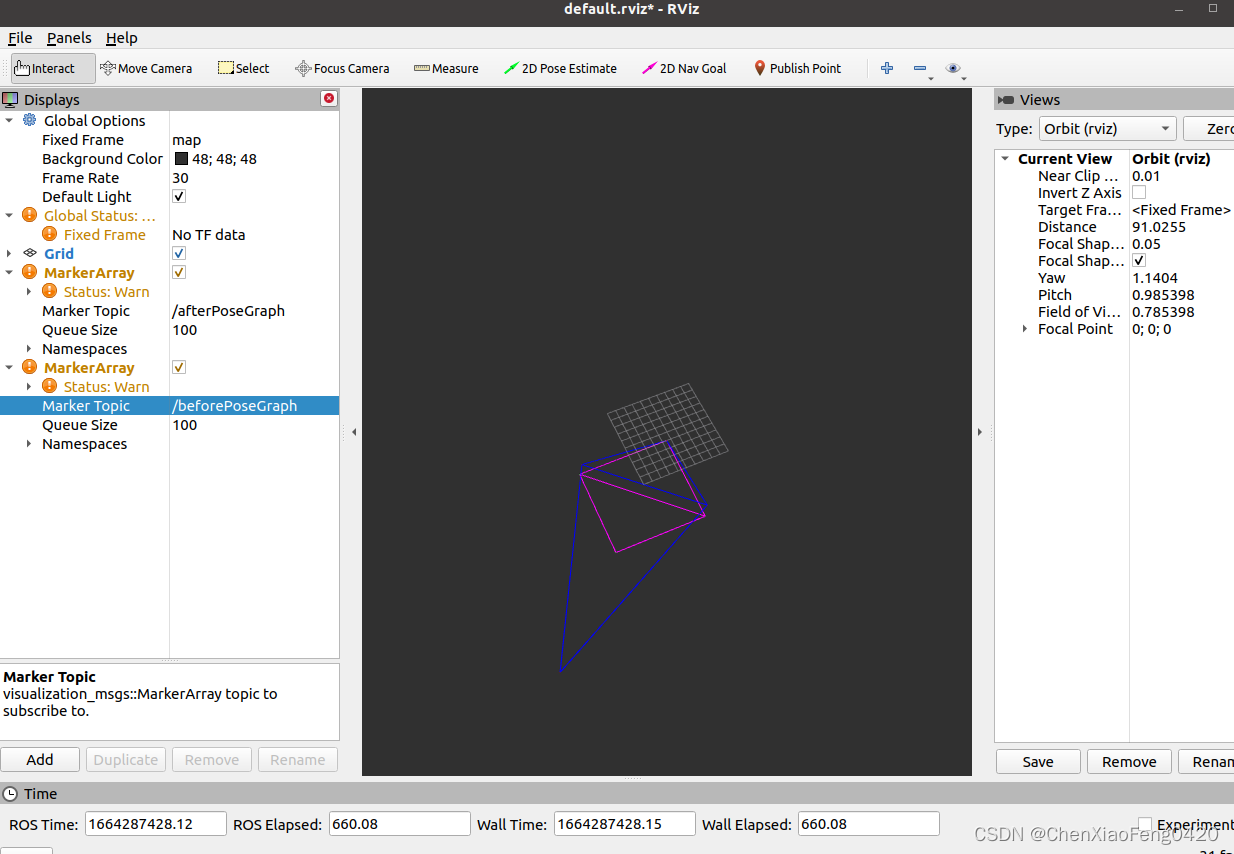
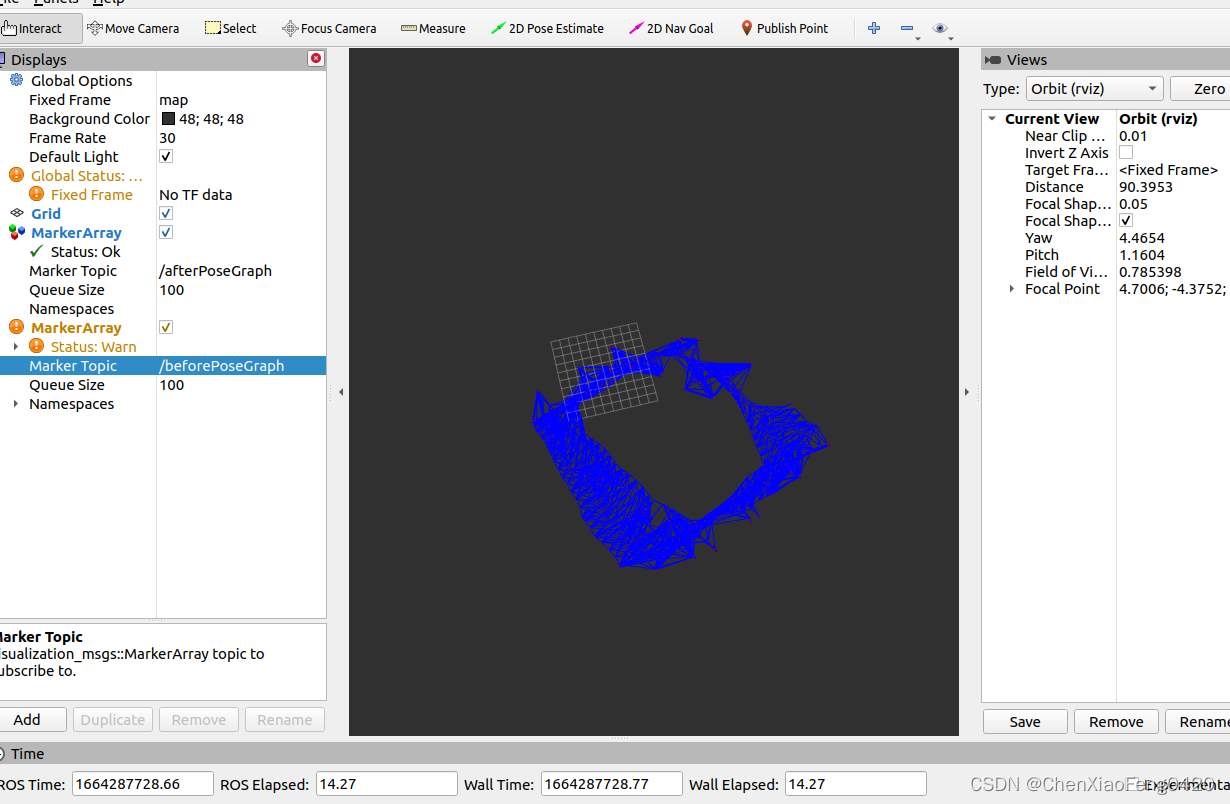
//TODO--End dx=H.colPivHouseholderQr().solve(-b);rosrun ls_slam ls_slam 启动运行
紫色为优化后的效果
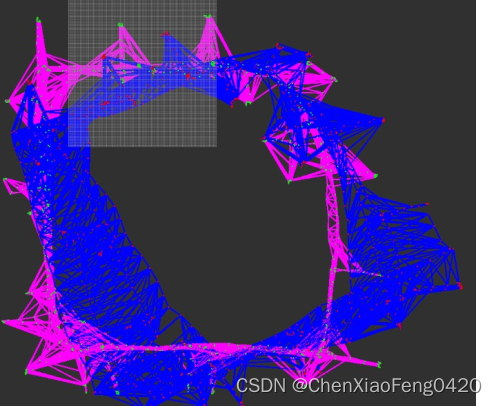
二、 rviz marker /markerArray使用
RVIZ提供了两种官方支持的RVIZ可视化插件,分别是rviz_marker和rviz_marker_array, 作用是显示一些圆形,圆柱等可视化marker,前者是一次显示一个marker对象,后者是一次显示一系列的marker对象。
具体使用方法可以见ROS tutorial: https://wiki.ros.org/rviz/Tutorials/Markers%3A%20Points%20and%20Lines
代码中主要使用visualization_msgs 进行创建
void PublishGraphForVisulization(ros::Publisher* pub, std::vector<Eigen::Vector3d>& Vertexs, std::vector<Edge>& Edges, int color = 0) { visualization_msgs::MarkerArray marray; //point--red visualization_msgs::Marker m; m.header.frame_id = "map"; m.header.stamp = ros::Time::now(); m.id = 0; m.ns = "ls-slam"; m.type = visualization_msgs::Marker::SPHERE; m.pose.position.x = 0.0; m.pose.position.y = 0.0; m.pose.position.z = 0.0; m.scale.x = 0.1; m.scale.y = 0.1; m.scale.z = 0.1; if(color == 0) { m.color.r = 1.0; m.color.g = 0.0; m.color.b = 0.0; } else { m.color.r = 0.0; m.color.g = 1.0; m.color.b = 0.0; } m.color.a = 1.0; m.lifetime = ros::Duration(0); //linear--blue visualization_msgs::Marker edge; edge.header.frame_id = "map"; edge.header.stamp = ros::Time::now(); edge.action = visualization_msgs::Marker::ADD; edge.ns = "karto"; edge.id = 0; edge.type = visualization_msgs::Marker::LINE_STRIP; edge.scale.x = 0.1; edge.scale.y = 0.1; edge.scale.z = 0.1; if(color == 0) { edge.color.r = 0.0; edge.color.g = 0.0; edge.color.b = 1.0; } else { edge.color.r = 1.0; edge.color.g = 0.0; edge.color.b = 1.0; } edge.color.a = 1.0; m.action = visualization_msgs::Marker::ADD; uint id = 0; //加入节点 for (uint i=0; i<Vertexs.size(); i++) { m.id = id; m.pose.position.x = Vertexs[i](0); m.pose.position.y = Vertexs[i](1); marray.markers.push_back(visualization_msgs::Marker(m)); id++; } //加入边 for(int i = 0; i < Edges.size();i++) { Edge tmpEdge = Edges[i]; edge.points.clear(); geometry_msgs::Point p; p.x = Vertexs[tmpEdge.xi](0); p.y = Vertexs[tmpEdge.xi](1); edge.points.push_back(p); p.x = Vertexs[tmpEdge.xj](0); p.y = Vertexs[tmpEdge.xj](1); edge.points.push_back(p); edge.id = id; marray.markers.push_back(visualization_msgs::Marker(edge)); id++; } pub->publish(marray); }
最后
以上就是怕孤单钢铁侠最近收集整理的关于激光slam 第六次作业的全部内容,更多相关激光slam内容请搜索靠谱客的其他文章。
本图文内容来源于网友提供,作为学习参考使用,或来自网络收集整理,版权属于原作者所有。








发表评论 取消回复