提示:文章写完后,目录可以自动生成,如何生成可参考右边的帮助文档
文章目录
- Topic话题
- 话题发布者(Publisher)的C++实现
- 节点.cpp文件的编写
- CMakeLists.txt的编写
- 话题订阅者(subscriber)的C++实现
- 节点.cpp文件的编写
- CMakeLists.txt的编写
- 话题处理工具 rostopic
推荐一个学习视频地址:ros学习
Topic话题
对于话题的详细说明可以参考:参考1
话题发布者(Publisher)的C++实现
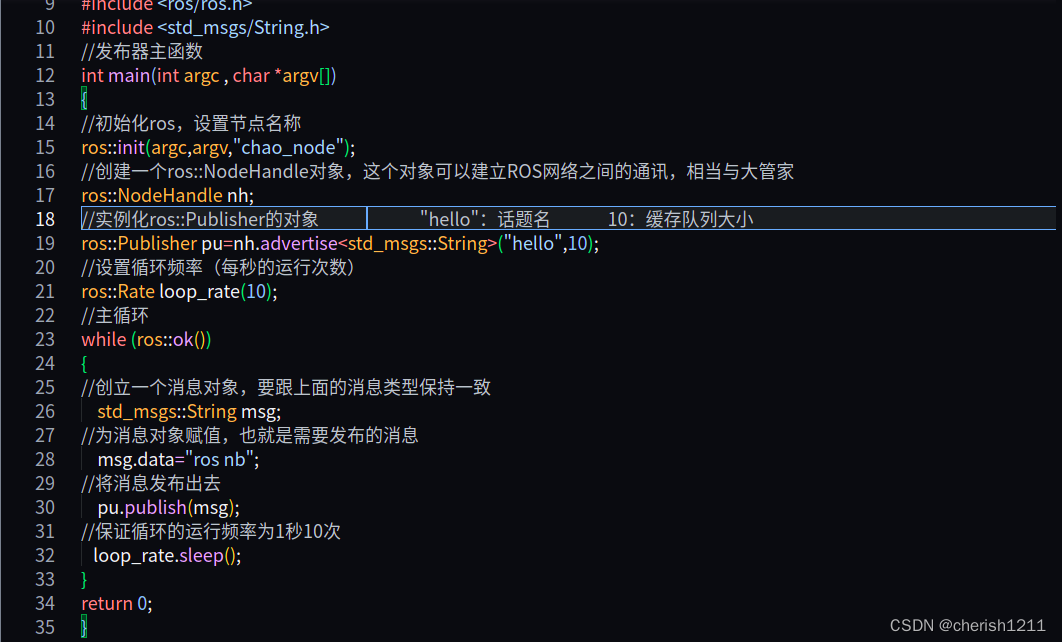
节点.cpp文件的编写
新建的功能包下的/src文件中建立节点.cpp文件
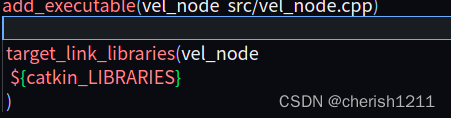
CMakeLists.txt的编写
打开CMakeLists.txt
找到Build区域
使用下面两条语句,第一条是声明C++库,第二条是指定要链接库或可执行目标的库
话题订阅者(subscriber)的C++实现
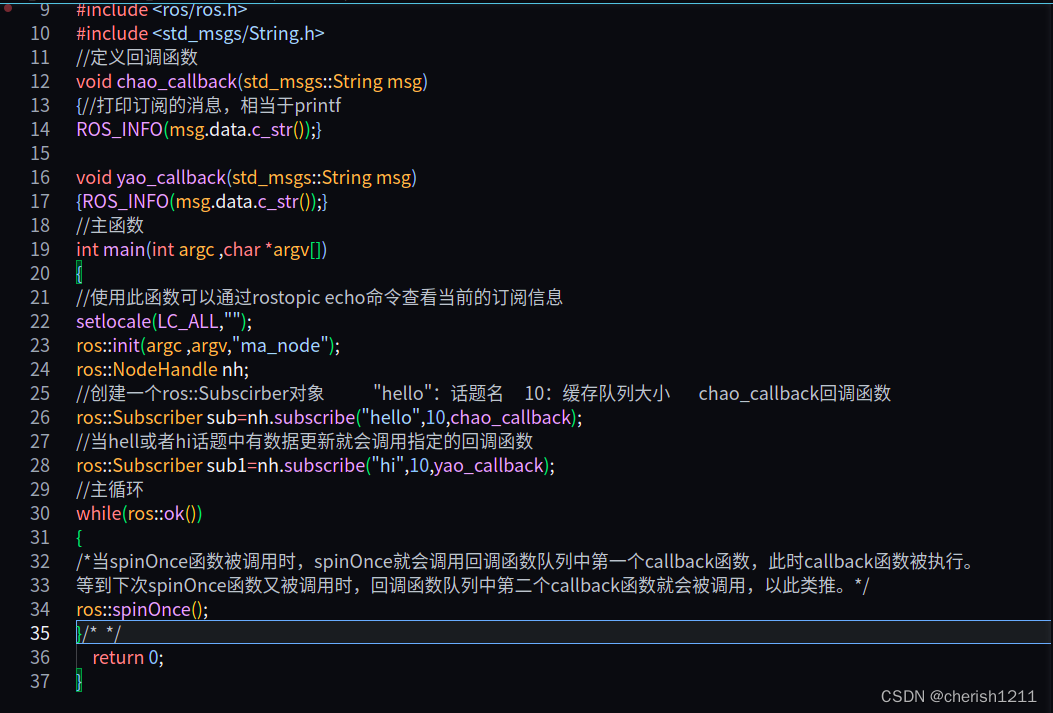
节点.cpp文件的编写
新建的功能包下的/src文件中建立节点.cpp文件
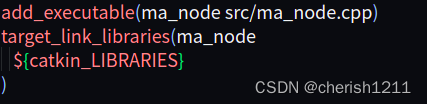
CMakeLists.txt的编写
与上面一致,调用两条语句
话题处理工具 rostopic
下面为常见命令的说明
rostopic [话题]:显示话题使用的带宽
rostopic echo [话题] :将消息打印到屏幕上
rostopic find message_type :根据消息类型查找话题
rostopic hz [话题]显示话题发布频率
rostopic info [话题] 打印有关话题的信息,如消息类型,发布者,订阅者
rostopic list 打印有关话题的列表信息
rostopic type [话题] 显示指定话题的消息类型
最后
以上就是傲娇大地最近收集整理的关于(无人机方向)ros小白学习之路(二)Topic话题Topic话题话题处理工具 rostopic的全部内容,更多相关(无人机方向)ros小白学习之路(二)Topic话题Topic话题话题处理工具内容请搜索靠谱客的其他文章。
本图文内容来源于网友提供,作为学习参考使用,或来自网络收集整理,版权属于原作者所有。








发表评论 取消回复